
Fターム[3D041AD47]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 車両外部状況 (949) | 道路状態 (548)
Fターム[3D041AD47]に分類される特許
81 - 100 / 548
車両の走行制御装置
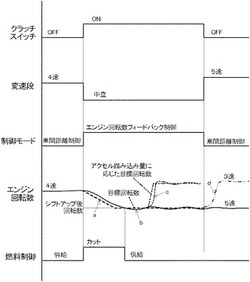
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、変速操作のためにクラッチの切断操作等が行われたときに、エンジン回転数が吹き上がることを防止する。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつオートクルーズ制御手段が備えられた車両において、前記オートクルーズ制御手段によるオートクルーズ制御中に、クラッチの切断操作等の動力遮断操作が行われたときに、該操作の直前の状態から手動変速機の変速段を一段シフトアップさせたときのエンジン回転数を目標回転数に設定し、この目標回転数に一致するようにエンジン回転数を制御するエンジン制御手段を備える。
(もっと読む)
走行支援装置、方法およびプログラム

【課題】走行安定性を低下させることなく目標位置において目標車速以下となるように走行支援を行うこと。
【解決手段】車両の前方に存在する目標位置および当該目標位置における目標車速を示す情報を取得し、前記車両の前方に存在する路面の摩擦度合が所定の基準より小さい低摩擦区間の長さを示す情報を取得し、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在する場合、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在しない場合に前記目標位置において車速を前記目標車速以下にさせる走行支援を行う際の走行支援開始位置よりも、前記低摩擦区間の長さだけ車両側の位置から前記走行支援を開始するとともに、前記低摩擦区間においては前記走行支援を中断する。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
運転支援装置
【課題】目標走行パターンを用いた運転支援において運転者の受ける違和感を抑制する運転支援装置を提供することを課題とする。
【解決手段】走行予定経路の先読み情報に基づいて走行予定経路における目標走行パターンを設定し、当該目標走行パターンに追従するように運転支援を行う運転支援装置1であって、運転者の運転操作の履歴に基づいて運転支援を行うことを特徴とし、運転者の運転操作の履歴に基づいて運転支援制御のON/OFFを切り替えたり、あるいは、運転者の運転操作の履歴に基づいて目標走行パターンを設定する。
(もっと読む)
車両の制振制御装置
【課題】 駆動出力制御による制振制御に於いて、エンジンのスロットル弁の可動部の摩耗などの特性の変化を管理し、その過度な進行を回避すること。
【解決手段】 本発明の車両の駆動出力を制御してピッチ又はバウンス振動を抑制する制振制御装置であって、車両の車輪と路面との接地個所に於いて発生する車輪トルクに基づいてピッチ又はバウンス振動振幅を抑制するようエンジンの駆動トルクを制御する制振制御部と、エンジンのスロットル弁の可動部の摩耗状態量などの特性の変化に基づいて、制振制御部により算出される制振制御のための車輪トルクを補償する補償成分の大きさを変更する補償成分調節部とを含み、スロットル弁可動部の特性の変化の過度な進行を抑制する機能を有する。また、車両の走行中に、スロットル弁可動部の特性の変化状態を推定する新規な構成が提供される。
(もっと読む)
駆動制御装置
【課題】車両の制御に起因する運転者の違和感を低減する。
【解決手段】駆動制御手段(100)は、車両(1)に搭載され、車両の走行状態に係る情報である走行状態情報を、車両が走行している位置に係る情報である位置情報に関連付けて学習する学習手段(12)と、学習された走行状態情報に応じて、学習された走行状態情報を車両の駆動制御に用いる際の度合いを決定する決定手段(15)とを備える。
(もっと読む)
モータ走行車両制御装置、モータ走行車両制御方法
【課題】坂路においてモータが過熱することを事前に防ぐことが可能なモータ走行車両制御装置及びモータ走行車両制御方法を提供すること。
【解決手段】駆動力の少なくとも一部を電気モータ16とする車両のモータ走行車両制御装置100であって、車速を検出する車速検出手段61と、アクセル開度を検出するアクセル開度検出手段14と、路面の傾斜を検出する傾斜検出手段13と、車速に基づいて車両の停止状態を判定する停止判定手段と、停止判定手段により停止状態であると判定され、アクセル開度が第1の閾値より大、かつ、路面の傾斜が第2の閾値より大、という条件が成立する車両状況か否かを判定する判定手段63と、車両状況の場合、車両に制動力を加える制動制御手段66と、電気モータのモータ電流を低下させるモータ電流制御手段65と、を有することを特徴とする。
(もっと読む)
車両の制御方法及び車両の制御装置
【課題】車両の停止時に該車両からの作動音の発生を抑制できる車両の制御方法及び車両の制御装置を提供する。
【解決手段】運転手によるブレーキペダルの操作によって車両が停止する場合、ブレーキ用ECUは、車両が停止する前に、自動変速機の入力クラッチを作動させてエンジンから後輪への動力伝達効率を低減させる(第4のタイミングt24)。その後、運転手によるブレーキペダルの操作によって車両が停止した場合、ブレーキ用ECUは、各リニア電磁弁に対する電流値Islを調整して車両に対する制動力を保持させる(第5のタイミングt25)。
(もっと読む)
車速制御装置
【課題】ACC制御に依存しすぎないようにするために行われるドライバに対する注意喚起を、当該ドライバの状態に応じて促すことができる車速制御装置を提供する。
【解決手段】本発明の車速制御装置は、車両前方の移動体に電磁波を照射し、当該移動体から反射された反射波を受信することにより上記移動体の移動に関する情報をターゲット情報として算出するターゲット情報算出手段と、上記車両の運転者の顔を撮像し、当該撮像された画像を用いて上記運転者の顔に関する情報を顔情報として算出する顔情報算出手段と、上記ターゲット情報に基づいて上記車両の車速を制御する車速制御手段と、上記車速制御手段によって上記車両が停止するときに上記運転者に対して警告動作を行う警告手段と、上記警告手段が行う上記警告動作の態様を上記顔情報に基づいて変化させる警報変更手段とを備える。
(もっと読む)
運転操作補助装置
【課題】運転操作補助装置において、自車両の前方の先行車や静止障害物への距離や相対速度によりブレーキ操作量やアクセル操作量を最適に補正して運転者の操作能力を違和感なく補助することにある。
【解決手段】制御手段(2)は、先行車に続いて自車両を停止させる場合に先行車が停止してから自車両が停止するまでの標準時間を記憶し、検出した先行車との車間距離と検出した自車両の速度と先行車が停止してから自車両が停止するまでの標準時間とから先行車に続いて自車両を停止させる場合の目標ブレーキ操作量を算出し、算出された目標ブレーキ操作量と検出されたブレーキ操作量とからブレーキ補正量を算出し、この算出されたブレーキ補正量に基づいてブレーキ操作量を補正する。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両速度制限装置
【課題】車両がより安全に曲線路を走行することができる車両速度制限装置を提供する。
【解決手段】車両速度制限装置20は速度管理ECU21を備えている。速度管理ECU21には、ステアリング操作角を検出するステアリングセンサ30と、車速センサ34からの信号が入力される。速度管理ECU21は、これらの信号に基いて、走行中の曲線路の曲率(道路曲率)を求める。さらにこの道路曲率に応じた目標制限速度を求めるとともに、目標制限速度に応じたエンジン目標トルクを求める。実トルクが目標トルクを越えている場合、エンジンを制御することによって実トルクを目標トルクに近付ける。さらに実速度が目標制限速度を越えている場合には、エンジンブレーキをかける、リターダ装置を作動させる、ブレーキ装置を作動させる、などの制動操作を実行することにより、この車両を目標制限速度まで減速させる。
(もっと読む)
運転者支援システムのための実世界の交通場面からの視覚特性の行動ベース学習
【課題】運転者支援システムをセットアップおよび運用するための、コンピュータに実装される方法を提供する。
【解決手段】車両の環境を視覚感知するステップと、車両のマン・マシン・インタフェースを操作している運転者の影響を受ける可能性がある、車両の状態を表すパラメータの少なくとも1つの変化率を感知するステップと、感知された変化率の特定のカテゴリに関連付けられ、したがって、運転者の特定行動に関連付けられた視覚的特徴を見つけるために、視覚感知によって収集された情報を、少なくとも1つの感知された変化率をその様々なカテゴリに分類することによって構造化するステップと、を含む。
(もっと読む)
走行装置
【課題】坂道登坂時に、車両が後退することを確実に防止し、安定した坂道停車及び坂道発進を実現することのできる走行装置を提供すること。
【解決手段】逆入力遮断クラッチ(32)により高速走行用駆動ユニット(16)及び高トルク走行用駆動ユニット(18)による走行を切替可能なクローラ走行装置(8)を備えたクローラロボット(1)において、坂道停車時に逆入力遮断クラッチが遮断状態となった場合(S1〜S3)、ブレーキ(26)を作動させてクローラロボットを停止させ(S4〜S6)、発進時には逆入力遮断クラッチが接続状態になったことを確認した後にブレーキを解除する(S7〜S9)。
(もっと読む)
減速支援システム
【課題】車両の運転者の意図に沿った減速支援制御を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が交差点に進入することを検知する第1検知手段(109)と、車両が交差点に進入した際に、減速制御開始条件が成立したことを条件に、減速支援制御を行う第1減速支援手段(109)と、車両が交差点を右折又は左折するか否かを判定する右左折判定手段(109)とを備える。車両が交差点を右折又は左折すると判定された場合、第1減速支援手段は、車両の運転者が、車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めたタイミングで、減速支援制御を終了する。他方、車両が交差点を右折又は左折しないと判定された場合、第1減速支援手段は、運転者が、アクセルオフからアクセルオンにしたタイミングで、減速支援制御を終了する。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のカーブ路入口走行時の誤動作を抑制する。
【解決手段】レーダーで検出した車両前方の停止物ターゲットが自車線内に所定時間以上存在することを、該停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識する条件としたものにおいて、自車のヨーレート(車両の旋回方向への回転角の変化する速度)の単位時間当たりの変動量が所定閾値以上であるときは、カーブ路入口を走行していると判断し、前記所定時間を計測するためのタイマをリセットすることにより、停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識することを禁止する。
(もっと読む)
走行支援装置
【課題】死角がある場合に適切な適正車速を設定する走行支援装置を提供することを課題とする。
【解決手段】車両に搭載される走行支援装置であって、車両前方の死角領域を検出する死角領域検出手段と、死角領域検出手段で検出した死角領域を減少する走行領域を検出する走行領域検出手段と、走行領域検出手段で検出した走行領域での適正車速を設定する適正車速設定手段を備えることを特徴とし、適正車速設定手段は、周辺環境に応じて適正車速を変更すると好適である。
(もっと読む)
車両制御装置
【課題】車両が右折又は左折する際に、運転者に違和感を与えることなく、適切に加減速を支援する。
【解決手段】車両の制御装置(10)は、車両(1)の走行環境を取得する走行環境取得手段(101、102、103、104、105、111)と、取得された走行環境に基づいて、車両が交差点への進入地点から退出地点へ至るまでに必要な走行距離を推定する走行距離推定手段(109)と、推定された走行距離に応じて、車両の駆動力及び制動力の少なくとも一方を制御する制御手段(109)とを備える。
(もっと読む)
道路形状検出装置、走行制御装置、及び道路形状検出方法
【課題】認識しているカーブ数のハンチングを抑制する。
【解決手段】各カーブ区間の入口補間点について、演算周期における前回の演算結果と比較し、カーブ区間数が変動しているか否かを判定し(ステップS5)、カーブ区間数が変動していたら、前回のカーブ情報と自車両の移動量とに基づいて、今回のカーブ情報を補正する(ステップS6)。先ず、カーブ区間が減少しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ増加させる。一方、カーブ区間が増加しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ減少させる。すなわち、今回のカーブ情報を、前回の配列に戻す補正を行うことで、前回のカーブ区間数を保持する(ステップS62)。
(もっと読む)
路外逸脱防止装置
【課題】 路外逸脱防止のための制御に対する効果を十分に得ると共に、路外逸脱防止のための制御の中止に対して運転者に違和感を与えることがない。
【解決手段】 コントローラ1が、走行状態から自車両が走行車線から逸脱するか否かを判断すると共に、自車両が走行する道路上の車線端又は道路境界に設けられ車両に振動を付与するランブルストリップが検出された場合に、車線外への逸脱を回避するように車両システム6により制駆動力を発生させる路外逸脱防止動作を制御する。コントローラ1は、運転者の操作に基づいてベース閾値を路外逸脱防止動作が中止されやすくする低方向に補正し、操作量が閾値を超えた場合に、車両システム6による路外逸脱防止動作を終了させる。
(もっと読む)
81 - 100 / 548
[ Back to top ]