
Fターム[3D041AD47]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 車両外部状況 (949) | 道路状態 (548)
Fターム[3D041AD47]に分類される特許
61 - 80 / 548
ブレーキ制御装置
【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
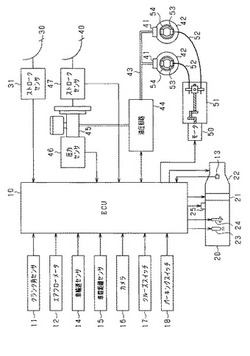
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
障害物回避装置

【課題】自車両周辺の障害物を高精度に認識しながら、当該認識された障害物および/または当該認識の信頼性に応じて、適切なタイミングで衝突回避システムを作動させる障害物回避装置を提供する。
【解決手段】本発明の障害物回避装置は、障害物を検知する複数の検知手段と、複数の検知手段によって検知された障害物に関する情報に基づいて、複数の検知手段によって検知されたそれぞれの検知結果に相関性があるか否かを判定する相関性判定手段と、相関性判定手段によって判定された判定結果に応じて、衝突回避システムを制御する障害物回避制御手段とを備え、障害物回避制御手段は、相関性判定手段によって相関性があると判定された場合、相関性がないと判定された場合に作動させるタイミングより早いタイミングで衝突回避システムを作動させることを特徴とする。
(もっと読む)
運転支援制御装置
【課題】運転支援制御装置により、走行条件に応じた運転者の嗜好や技量に適応した円滑な車両走行を実現する。
【解決手段】運転支援制御装置において、ユーザ入力により、予め運転支援制御設定が入力される。車速設定入力画面においては、リンク400における設定車速として、たとえば「40km/h」が設定される。条件設定入力画面においては、このリンク400に対する車速設定および条件設定の組合せの有効期間、該組合せの適用対象の時間帯、および該組合せが適用される天候条件および路面状態の条件が各々設定される。運転支援制御設定に従って、車両走行時に車両制御処理が行われる。運転支援制御装置は、設定した条件に基づき設定車速の超過を検出したとき、運転者に減速を促す警告を報知すると共に、ECUに速度超過を通知してスロットル開度の低減等が行われるようにする。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
車両制駆動制御装置
【課題】上り坂の道路で車両のずり下がりを抑制する技術において、推定路面勾配の誤差によって車両のずり下がりが発生してしまう可能性を低減する。
【解決手段】ずり下がり防止処理実行部46は、上り勾配路において車両の後方へのずり下がりが発生する可能性があると判定するまでは、FF演算部41を制御することで、目標車軸トルクのFF演算分を、走行抵抗に対抗して車両が目標加速度を実現するために必要な車軸トルクの推定値に到達するように算出して出力させ、また、ずり下がりが発生する可能性があると判定した後は、FF演算部41を制御することで、目標車軸トルクのFF演算分を、上記必要な車軸トルクの推定値よりも所定量αTだけ減少させた車軸トルクに到達するように算出して出力させると共に、所定量αTの減少の効果の相殺を防ぐために、FB演算部42における目標車軸トルクのフィードバック演算分の上昇を制限する。
(もっと読む)
制動制御装置
【課題】車両が停止する直前に車両の減速度を低下して車両の揺り戻しを抑える制御において、上り坂で車両がずり下がってしまう可能性を低減することを目的とする。
【解決手段】車両が上り勾配道路において減速した場合t2〜t3に、車両の減速に伴いゼロに近づくブレーキ要求車軸トルク65を算出して揺り戻しを低減する。またその後の開始タイミングt3において、ブレーキ要求車軸トルク65の初期値B0、最終値B1、および補正期間tdを決定し、当該開始タイミングt3から補正期間tdの間、ブレーキ要求車軸トルクを初期値B0から最終値B1まで低下させる。また、車輪速センサ7の検出信号に基づいて検出した車両の検出車速が最後に検出限界最小車速Vc以上だった限界時刻t3以前における検出車速の変化に基づいて、車両の実車速がゼロになる停止時刻t4を推定し、上記開始タイミングt3から当該停止時刻t4までの期間を補正期間tdとする。
(もっと読む)
車両発進補助制御システム
【課題】運転者が違和感を覚えない車速での発進と発進後の車速を時間経過と共に運転者の意図する速さへと制御すること。
【解決手段】自車のいる路面の勾配を検出又は推定し、その勾配と発進からの経過時間又は運転者のアクセル操作からの経過時間とに応じて制動力制御による停車保持状態からの発進時の目標車速を設定し、その発進時に前記目標車速となるように動力源等の駆動装置や制動装置を制御して車速制御を行うこと。その目標車速については、降坂路で停車保持状態から発進させる場合、自重による加速度を抑える速さに設定すればよい。
(もっと読む)
道路勾配計測装置及び道路勾配計測方法
【課題】道路勾配の計測精度の向上を図る。
【解決手段】GPS12の受信感度が所定のレベル以上であって標高に変化が検出された場合、勾配算出部25は、GPSデータ取得部21によりGPS12から取得された走行速度、標高等のデータを用いて道路の勾配を算出する。標高に変化がないとき、定地走行抵抗算出部22は、ECUデータ取得部23により取得されたECUデータを用いて定地走行抵抗を算出し、定地走行抵抗保持部27に保持させる。このときの勾配は0である。GPS12の受信感度が所定のレベルに達していないとき、勾配算出部25は、保持されている定地走行抵抗とECUデータ取得部23により取得されたECUデータを用いて道路の勾配を算出する。
(もっと読む)
車両
【課題】車両の進路上の路面変化に対応した適切な駆動力配分を前以て実現することができる車両を提供する。
【解決手段】車両のメインECU3は、第1情報取得部4Aにより取得された第1情報から導出される第1位置の路面摩擦係数である第1摩擦係数μ1と、第2情報取得部4Bにより取得された第2情報から導出される第2位置の路面摩擦係数である第2摩擦係数μ2とから、車両の総駆動力の目標値を決定する。そして、総駆動力の目標値を満たし且つ第1摩擦係数μ1に対応したスリップ限界を超えないように、第1駆動力および第2駆動力の目標値を決定する。
(もっと読む)
車両走行制御方法
【課題】走行中の車両の有する運動エネルギーを最大限に活用した車両走行制御方法。
【解決手段】車両走行区間を、起点および終点を各々信号交差点あるいは一時停止点とする単位走行制御区間に分割する。前記単位走行制御区間毎に、起点からの加速走行・定速走行を行いその後の終点に向けての走行は終点到達条件を満足する範囲内で前記加速走行・定速走行後に車両の有している運動エネルギーを最大限有効利用した惰性走行を行う。また、前記惰性走行時の車両の惰性走行減速度は、惰性走行中の一定時間あるいは一定走行距離毎に算出し以降それが更新されるまでの間の惰性走行可否の判定に利用する。
(もっと読む)
駆動力制御装置
【課題】車両の走行時におけるステア特性を向上させることができ、かつ、運転者が違和感を持つことを抑制することの可能な駆動力制御装置を提供する。
【解決手段】車両のステア特性を目標ステア特性にするべく、車両の駆動輪の駆動力を制御する駆動力制御装置において、車両の運転者の意図から求めた駆動輪の基本駆動力に対して、車両のステア特性を相対的に向上させるために増加する分の駆動力を求める第1算出手段(ステップS1)と、増加する分の駆動力の上限値を複数の条件に基づいて複数求める第2算出手段(ステップS2,S4,S5)と、第1算出手段により求められた増加分の駆動力を、第2算出手段により求められた複数の上限値のうち最も小さい上限値により制限して、最終的な駆動力の増加量の上限値を求める第3算出手段(ステップS6,S7)とを備えている。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
車両制御装置
【課題】勾配での運転技量を精度よく推定することができ、その結果、当該運転技量に合った運転支援が可能となり、ドライバビリティをさらに向上させることができる車両制御装置を提供することを課題とする。
【解決手段】ECUは、実際のアクセル操作地点、自車両の車速および前方道路の道路勾配情報を取得し、当該車速と予め入力された応答遅れ時間とから、アクセル操作に対し車両が反応するまでの走行距離を算出し、当該道路勾配情報から前方道路の勾配の変化地点を検出し、当該変化地点から当該走行距離だけ手前の地点を理想のアクセル操作地点として推定する。ECUは、実際のアクセル操作地点と理想のアクセル操作地点との乖離距離が予め設定した閾値より大きかった場合には、運転技量が低いと推定して駆動力応答性を下げ、そうでなかった場合には、運転技量が高いと推定して駆動力応答性を良くする。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】特に新たな機構等を設けることなく、不要な減速感による走行フィーリングの悪化を招くことがなく、路外逸脱防止のためのヨーモーメントを適切に発生する。
【解決手段】白線位置情報に基づいて第1の逸脱量yLを算出し、障害物位置情報に基づいて第2の逸脱量ySを算出し、車両1にヨーモーメントや減速度を発生させて障害物や白線に対する車両の逸脱を防止する制動力Bfi、Bfo、Bri、Broを障害物や白線に対する逸脱量yL、ySを基に算出してブレーキ制御装置10に出力する一方、交差角αと第1の逸脱量yLと第2の逸脱量ySに応じて障害物や白線に対する車両の逸脱を防止するのに必要な必要モーメントMを算出し、この必要モーメントMに応じてトルクアップ基準値Tsを設定し、車速V0に応じて設定するトルクアップ補正ゲインGtで補正してトルクアップ量ΔTを求め、エンジン制御装置11に出力する。
(もっと読む)
車両の制御装置および制御方法
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】駆動力源とその駆動力源の出力側に連結された変速機とを搭載した車両における前記駆動力源の回転数もしくは前記変速機の変速比を制御する車両の制御装置において、前記車両の走行状態に基づく指標を求めるとともに、その指標に基づいて前記駆動力源の要求回転数もしくは前記変速機に対する要求変速比を制御するように構成されている。
(もっと読む)
車両の制御装置
【課題】操舵輪から伝達される操舵反力を迅速且つ正確に推定する。
【解決手段】
前輪及び後輪のうち少なくとも一方の舵角を変化させることが可能な舵角可変手段(200)と、前輪及び後輪のうち少なくとも一方における左右輪の制駆動力差を変化させることが可能な制駆動力可変手段(600)とを備えた車両(10)を制御する装置(100)は、車両の目標運動状態に対応する複数の目標状態量を設定する設定手段と、車両の運動状態が目標運動状態となるように、設定される複数の目標状態量に応じて舵角可変手段及び制駆動力可変手段を制御する運動制御手段と、設定される複数の目標状態量の各々、設定された複数の目標状態量に応じた上記少なくとも一方の舵角及び設定された複数の目標状態量に応じた上記少なくとも一方における左右輪の制駆動力差のうち複数の要素に基づいて、操舵反力を推定する推定手段とを具備する。
(もっと読む)
走行制御装置
【課題】自車両の前方に加速や減速が必要となる走行環境がある場合におけるドライバの操作負担を軽減することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず自車両の前方に加速が必要となる走行環境があるかどうかを判断し、加速が必要となる走行環境がないときは、アクセルをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御し、加速が必要となる走行環境があるときは、自車両を所定の加速度で加速させるように制御する。そして、走行制御装置は、ブレーキがON操作されると、自車両の加速動作を解除するように制御し、その後ブレーキをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御する。
(もっと読む)
運転支援装置
【課題】本発明は、リスク回避の確実性の向上が可能な運転支援装置を提供することを目的とする。
【解決手段】運転支援装置1は、車両の運転者に対して、車両の運転におけるリスクの対象となる対象物を回避するために運転支援を実施する装置であって、運転者の視線を検出するドライバ状態検出部4と、運転者が対象物を注視しているか否かを判定する注視判定部13と、各運転支援形態における制御介入度を調整する制御介入度調整部20と、運転支援形態及び調整された制御介入度に基づき、運転支援のための制御を実施する運転支援制御部15とを備え、制御介入度調整部20は、注視判定手段により運転者が対象物を注視していると判定されなかった場合に、注視していると判定された場合と比較して制御介入度を大きくする。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、前記変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときのブレーキ制御を運転者の要求に適合させるように行うことを課題とする。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつエンジンの駆動制御とブレーキの制動制御とでオートクルーズ制御を行う車両において、前記制動制御が行われている状態で、エンジンから駆動輪への動力伝達を遮断する動力遮断操作が行われ、この状態で前記手動変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときに、該アクセルペダルの踏み込み量が所定値より大きいときは前記制動制御を解除し、該アクセルペダルの踏み込み量が前記所定値より大きくないときは前記制動制御を継続する制動制御手段を備える。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】アクセルペダル反力発生装置の故障時にも運転者に違和感を与えることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両の前方障害物に対するリスクポテンシャルを算出し、リスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。アクセルペダルにリスクポテンシャルに応じた反力を付加する反力発生装置の故障が検出されると、アクセルペダルを踏み込んでもエンジントルクが増大しないようにエンジントルク特性を補正する。
(もっと読む)
61 - 80 / 548
[ Back to top ]