
Fターム[3D041AD47]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 車両外部状況 (949) | 道路状態 (548)
Fターム[3D041AD47]に分類される特許
141 - 160 / 548
車間距離制御装置
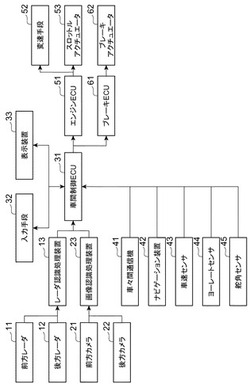
【課題】 車速変動を低減して燃費悪化を抑制することを可能とした車間距離制御装置を提供する。
【解決手段】 レーダ11、12やカメラ21、22、車々間通信機41等で取得した隣接車線を含む他車両の状況、車線の状態といった車両の走行環境から車間制御ECU31は、先行車両と自車両との間に他車両が割り込んでくる割り込み可能性を判定し、当該割り込み可能性が低いと判定した場合には、そうでない場合に比較して先行車両との車間距離が長くなるようエンジンECU51、ブレーキECU61により、車両の加減速状態を制御する。
(もっと読む)
運転制御装置

【課題】制動力の調整のみによって左右の駆動輪間の前後力に差を与えて車両の旋回性能を制御する場合に、制動による減速感を低減すること。
【解決手段】運転制御装置20は、走行軌跡設定部21と、制御条件判定部22と、操作感度変更部23とを備える。走行軌跡設定部21は、車両が将来走行する将来走行軌跡を設定する。制御条件判定部22は、走行軌跡設定部21が設定した将来走行軌跡から、US(アンダーステア)抑制制御の介入が予測されるか否かを判定する。操作感度変更部23は、制御条件判定部22が、US抑制制御の介入が予測されると判定した場合、アクセルペダルの操作感度を、US抑制制御の介入がない場合よりも、車両の内燃機関の出力が増加しやすくなるように変更する。
(もっと読む)
車両制御装置および車両制御方法
【課題】回避すべき対象物を発見した場合等の緊急回避が要請される場合に、精度を担保しつつ限られた時間内に演算を完了させることができる車両制御装置および車両制御方法を提供することを課題とする。
【解決手段】本発明は、検出部を制御して回避すべき対象物を検出し、対象物までの距離を計測し、計測された距離に基づいて、制動回避または操舵回避を選択し、制動回避が選択された場合には条件式として前後方向のみの変数をもつ式を設定し、操舵回避が選択された場合には条件式として左右方向のみの変数をもつ式を設定し、設定された条件式に基づいて車両の将来の走行軌跡を演算することを特徴とする。
(もっと読む)
ドライバ状態検出装置、車載警報装置、運転支援システム
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。このドライバ状態係数Kは、自車両に先行車両の画像を撮影する撮像手段を備えておき、その撮像手段の撮影した先行車両の画像の面積の単位時間当たりの変化度合いから算出する。
(もっと読む)
車両走行支援制御方法および装置
【課題】
車両の走行中に有している運動エネルギーを最大限に活用することによって車両走行に必要なエネルギーおよび排出ガス量を削減する。
【解決手段】
走行経路中の停止点S0、S1、・・・Sn、Sn+1、・・・及びその停止順序をあらかじめ設定し、設定された停止点Sn およびSn+1 間の車両走行距離距離Dn+1 および前記停止点Sn からの走行距離ΔD から、現時点から次に停止すべき地点Sn+1 までの残距離Dr =(Dn+1−ΔD)を算出し、前記残距離Dr が現時点での走行速度vで惰性走行に移行した場合、次に停止すべき地点Sn+1 に惰性走行で到達可能な距離か否かを判定し、到達不可と判定した場合は現時点まで行ってきた加速走行あるいは定速走行を継続し、その後一定時間あるいは一定走行距離走行後改めて前記惰性走行可否の判定を行う。到達可能と判定した場合は惰性走行に移行して次に停止すべき地点Sn+1まで走行する。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、ACC制御の実行中に、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に、先行車が存在するときは、車間制御ECU20及びブレーキ制御ECU42は先行車の減速度に応じて自車両を減速させる。これにより、運転者が居眠り等の状態にないにも関わらず、運転者の意図に反して速度が低下することが少なくなり、安全性を確保しつつ運転者に与える違和感を軽減することが可能となる。
(もっと読む)
車両走行制御方法
【課題】
車両の走行中に有している運動エネルギーの最大限の有効活用による車両走行に必要なエネルギーおよび排出ガス量の削減。
【解決手段】
車両の現地点から車両停止地点までの距離情報、あるいは車両の現地点から交差点までの距離情報および交差点信号の信号状態変移情報を知って、車両停止点での停止あるいは交差点での青信号・無停止通過のための減速を車両が現地点で有している運動エネルギーを活用することによって、即ち惰性走行を最大限に利用することによって、おこなう。また渋滞中においては車両の発進・加速を効率的に行い、発進・加速の結果車両が獲得した運動エネルギーを有効活用しての惰性走行によって省エネルギー・排出ガス量削減走行をおこなう。
(もっと読む)
車線変更支援装置
【課題】車線変更の安全性をより正確に判断して所定の安全制御を行なうことが可能な車線変更支援装置を提供すること。
【解決手段】自車両が行なう車線変更を検知するための車線変更検知手段と、前記自車両の車線変更先の車線を前記自車両の後方側から接近する接近車両における、前記自車両から見た相対加速度を検出するための相対加速度検出手段と、前記自車両の速度を検出する速度検出手段と、前記速度検出手段により検出された速度に基づく自車両の限界駆動力を算出し、該算出した限界駆動力を車重で除して算出される限界加速度と、前記相対加速度検出手段による検出結果に基づく相対加速度と、の差が閾値以下である場合に所定の安全制御を行なう制御手段と、を備える車線変更支援装置。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者の運転操作の意図や自車両の周囲環境に適していない制御介入がなされることによって制御介入に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、障害物に車両1が接触することを回避するための車両1の走行経路を回避経路として算出し、運転者の運転状態の危険度と車両1の走行環境の危険度とに基づいて算出された回避経路を自車両が走行するために必要な自車両の制御量を補正し、補正された制御量に従って車両1の走行状態を制御する。このような構成によれば、運転者の状態と車両1の周囲環境の危険度の両方を考慮して運転者の運転操作を支援することができるので、制御介入に対し運転者が違和感を感じることを防止できる。
(もっと読む)
車両の制御装置
【課題】道路の勾配変化によって車両前方の見通しが損なわれる場合において、適切な時点(地点)にて運転者に的確な情報を提供し、又は、車両が安定して走行できるように車両を制御すること。
【解決手段】車両前方にある道路の勾配情報Kr,Prに基づいて、車両の運転者が道路の前方を見通せない区間(見通し不可区間)が車両前方に存在するか否かが判定され、見通し不可区間が存在すると判定された場合、勾配情報に基づいて見通し不可区間の終了地点(見通し地点Pm)が設定される。この見通し地点Pmと現在の車両位置Pvhとに基づいて、運転者に対する報知制御、車両の速度制御、及び、車両の操舵比制御のうち少なくとも1つ以上の制御が実行される。これらの制御実行に使用されるパラメータは、見通し地点Pmの前方にある道路のカーブ情報Rc,Pc、勾配情報に基づいて調整される。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】タイヤの摩擦限界に対する余裕度をより適切に推定する。
【解決手段】車両状態推定装置は、接地面において前記車輪のセルフアライニングトルクと前記車輪のスリップ度との比である入力を設定するためのタイヤスリップ角演算部43、セルフアライニングトルク演算部45及びセルフアライニングトルク−スリップ角比演算部46と、その入力を基に、車輪のグリップ特性を示すグリップ特性パラメータである出力を決めるためのトルク勾配演算部48及びμ勾配演算部49を備える。
(もっと読む)
走行支援装置
【課題】 一定車速での走行を支援する際に、燃費の向上を図ることができる走行支援装置を提供する。
【解決手段】 走行制御ECU1は、目標車速Vtとする一定車速での走行制御を支援する。このとき、坂路の手前の区間において、坂路走行による車速変化と逆方向の車速変化を許容して支援を行う。たとえば、上り坂路の手前位置では、減速を抑制する制御を行い、下り坂路の手前位置では、加速を抑制する制御を行う。
(もっと読む)
走行支援装置
【課題】
従来技術では、ブレーキ制御ではステアリング制御よりも小さいヨーモーメントしか発生できないため、確実な障害物回避を実現できず、ステアリング制御では車線を跨ぐ度にハンドルが取られるため、ドライバが違和感を覚える、という課題がある。
【解決手段】
走行支援装置は、自車の走行状態とレーンマーカの位置と自車の周囲障害物の位置及び種別を検出する検出部と、自車の走行状態とレーンマーカの位置と周囲障害物の位置及び種別に基づいて、レーンマーカからの逸脱及び周囲障害物との衝突を防止するように目標ヨーモーメントを算出する算出部と、自車の走行状態,レーンマーカの位置,障害物の位置及び種別の少なくとも一つに基づいて、目標モーメントを、制駆動力を制御する第1のアクチュエータと操舵を制御する第2のアクチュエータに配分する配分部を備える。
(もっと読む)
ハイブリッド車両
【課題】アクセル操作が行われていない場合に、駆動力抜けを生じさせることなく、内燃機関を始動させることが可能な、デュアルクラッチ式変速機を備えたハイブリッド車両の制御技術を提供する。
【解決手段】ハイブリッド車両1のECU100は、アクセル操作が行われていないときに、電気モータ50から出力される機械的動力のみを駆動輪88に伝達して当該駆動輪88に生じるモータ駆動力により車両を駆動するクリープ走行を行わせることが可能なものである。ECU100は、ブレーキ操作が行われている場合には、電気モータ50の力行を停止して、第1変速機構30の変速段31,33,35を全て解放状態にする。一方、ブレーキ操作が行われていない場合には、車速が、予め設定された目標車速以上となるように、モータ駆動力(クリープ走行駆動力C)を設定して電気モータ50を力行させる。
(もっと読む)
車速制御装置
【課題】運転者の感覚に合った走行が可能な適切な目標車速に変更できる車速制御装置を提供することを課題とする。
【解決手段】目標車速に基づいて車両の車速を制御する車速制御装置であって、運転者の特性を推定する運転者特性推定手段と、走行中の道路形状を取得する道路形状取得手段と、運転者特性推定手段で推定した運転者の特性と道路形状取得手段で取得した道路形状に基づいて目標車速を変更する目標車速変更手段とを備えることを特徴とする。
(もっと読む)
車両の制御装置及び制御方法
【課題】アイドルストップ状態からのエンジン再始動時に、エンジントルク又はエンジン回転数の急上昇を、路面の勾配に応じて抑制することを可能にする手段を提供する。
【解決手段】自動車Wは、エンジン1と、ロックアップクラッチ26を有するトルクコンバータ20と、自動変速機10とを搭載している。自動車Wの停止時において自動変速機10がDレンジにあるときに、エンジン停止条件が成立すればコントロールユニットによってエンジン1が停止させられ、この後エンジン再始動条件が成立すればエンジン1が再始動させられる。エンジン再始動条件が成立したときには、ロックアップクラッチ26をスリップ締結することにより、エンジン再始動時におけるエンジン回転の急上昇が抑制され、エンジン1のローリング振動が抑制される。また、エンジン再始動時におけるエンジントルクないしはエンジン回転数の上昇率が路面の勾配に応じて好ましく制御される。
(もっと読む)
車両の速度制御装置
【課題】カーブを通過する際、運転者の車両を加速させたいという意志に応じて、運転者の違和感が少なく且つ円滑な速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】カーブ車速制御において、運転者が加速操作を行わない場合(加速操作量Ap=0)に対応する目標車速Vtoが、第1、第2、第3目標車速Vto1,Vto2,Vto3で構成される特性に従って決定される。Vto1は、地点Pcrまで減少して地点Pcrにて適性車速Vqoとなり、Vto2は、地点Pcrから地点Pcaまで適正車速Vqoに維持され、Vto3は、地点Pcaから地点Pcsまで増大する特性に決定される。運転者による加速操作量Apに基づいて修正車速Vzが演算され、制御中に亘ってVtoにVzが加算されて目標車速Vt(=Vto+Vz)が決定される。そして、車速が目標車速Vtを超えないように調整される。
(もっと読む)
省燃費運転システム及びその制御方法
【課題】上り坂を走行中に上り坂に関する道路勾配情報データベースを構築することが出来て、上り坂を走行する際に省燃費走行を行なう様なアドバイスや車両制御を行なうことが出来る省燃費運転システム及びその制御方法の提供。
【解決手段】車速を計測する装置(3)と、車両の加速度を計測する装置(4)と、燃料流量を計測する装置(5)と、エンジン負荷を計測する装置(6)と、エンジン回転数を計測する装置(7)と、シフト位置を検出する装置(9)と、上述した各装置からの信号を受信して演算と解析を行なう制御装置(10)とを備え、該制御装置(10)はエンジン出力を演算し、演算されたエンジン出力がエンジン出力規定値(Pa)以上であるが、車両加速度が車両加速度規定値(αa)以下であれば上り坂を走行していると判断する機能を有している。
(もっと読む)
車間距離制御装置
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速を検出する車速検出手段2aと、先行車両を検出するとともに自車両と先行車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して算出された車間時間を設定車間時間に制御する車間距離制御を行う車両制御手段2cと、車線変更の開始及び終了を検出する車線変更検出手段2dと、運転者の顔向きを検出する顔向き検出手段2eとを備えるとともに、車線変更検出手段2dにより車線変更の終了が検出されて、車間距離検出手段2bにより先行車両が検出されずに、顔向き検出手段2eにより検出された顔向きが前方以外である場合に、車両制御手段2cが車間距離制御による加速を禁止することを特徴とする。
(もっと読む)
運転支援装置
【課題】操舵力制御と制駆動力制御との制御分担比を適切に設定する運転支援装置を提供する。
【解決手段】自車両前方の環境情報に基づいて自車両を操向する運転支援装置を、自車両前方の環境を認識する環境認識手段110と、環境認識手段を用いて自車両の目標操向量を算出する目標操向量算出手段140と、操舵輪タイヤが発生するタイヤ力を算出するタイヤ力算出手段170と、操舵輪タイヤの限界タイヤ力を推定する限界タイヤ力推定手段167と、操舵機構に付与される操舵力を制御する操舵力制御手段200と、左右輪の制駆動力差を制御する制駆動力制御手段190と、目標操向量を所定の制御分担比で割り振ることにより操舵力制御手段の目標操舵力及び制駆動力制御手段の目標制駆動力差を設定するとともに、タイヤ力の限界タイヤ力への接近に応じて、制駆動力制御手段の操舵力制御手段に対する制御分担比を増加させる制御分担比設定手段180とを備える構成とする。
(もっと読む)
141 - 160 / 548
[ Back to top ]