
Fターム[3D041AE20]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | クラッチ (538) | 半クラッチ (68) | すべり率 (41)
Fターム[3D041AE20]に分類される特許
1 - 20 / 41
車両用駆動装置の制御装置
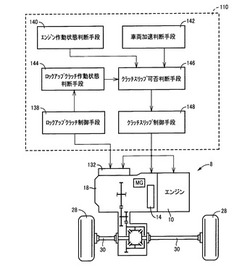
【課題】エンジンとエンジン断続用クラッチと電動機と流体伝動装置とを備えた車両用駆動装置において、燃費悪化を抑制することができる車両用駆動装置の制御装置を提供する。
【解決手段】クラッチスリップ制御手段148は、車両6の加速操作時には、エンジン回転速度Neをタービン回転速度Ntに一致させるようにエンジン断続用クラッチK0をスリップさせるクラッチスリップ制御を実行する。従って、車両6の加速操作時にエンジン断続用クラッチK0を完全係合状態にする場合と比較して、車両加速中のエンジン10の回転加速度が低められエンジン10の慣性トルクが小さくなり、エンジン回転速度Neが低く推移するので、車両6の燃費悪化を抑制することができる。また、前記クラッチスリップ制御ではエンジン回転速度Neはタービン回転速度Ntに一致するように制御されるので、運転者に与える違和感を低減できる。
(もっと読む)
電動車両の制御装置

【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
車両の制御装置
【課題】 クラッチの耐久性を向上しつつ運転性を確保可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールドと判定され、かつ、勾配路に応じた所定時間が経過したときは、ブレーキ制御手段を用いて車輪に機械的制動トルクを付与すると共に、クラッチの締結トルクを低下させる締結要素保護制御を実施することとした。
(もっと読む)
車両の制御装置
【課題】 駆動輪スリップが生じた場合であっても、車両としての走行性や安定性が確保可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 モータと駆動輪との間に介装されたクラッチをスリップ制御すると共に、モータをクラッチの駆動輪側回転数よりも所定量高い目標モータ回転数となるように回転数制御する走行モードのときに、車体速に所定スリップ量を加算した目標モータ回転数の上限回転数を設定することとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 バッテリSOCの高低に関わらず、MWSC走行モードからWSC走行モードへ移行することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 モータスリップ走行制御とエンジン使用スリップ走行制御とを切り換えるときに、目標駆動トルクが大きいほど、モータジェネレータの回転数上昇の変化率を高く設定するようにした。
(もっと読む)
車両の制御装置
【課題】 運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールド状態と判定されたときは、車輪に機械的制動トルクを付与すると共に、駆動源と駆動輪の間のクラッチの締結トルクの出力を減少させる締結要素保護制御を実行する。このとき、機械的制動トルクの増加勾配を、路面勾配が大きい程大きな増加勾配に設定することとした。
(もっと読む)
車両の走行制御装置
【課題】発進クラッチを締結するときであってもエンジンストールを生じさせない車両の走行制御装置を提供する。
【解決手段】内燃エンジンの冷却水温に基づいて第1アイドル回転速度を演算する第1演算部(S1)と、自動変速機の作動液の温度に基づいて第2アイドル回転速度を演算する第2演算部(S2)と、第1アイドル回転速度及び第2アイドル回転速度のうちいずれか高いほうを目標アイドル回転速度として設定する目標アイドル回転速度設定部(S3〜5)と、目標アイドル回転速度で内燃エンジンを運転して、モータージェネレーター及び駆動輪の間に配置された発進クラッチをスリップ制御する発進クラッチ制御部(S6)と、を有する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時、トルク変動がそのまま車輪に伝わることを防止しながら、発進クラッチの固着判定時間の短縮化を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第2クラッチ5(CL2)と、固着判定手段(図9)と、を備える。モータジェネレータ2は、エンジン1に連結される。第2クラッチ5(CL2)は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。固着判定手段(図9)は、モータジェネレータ2をスタータモータとするエンジン始動制御が開始されると、モータジェネレータ2に対する許容入力トルク指令とエンジン1に対する燃料噴射停止指令を出力し続け、第2クラッチ5(CL2)のスリップ量Sが固着判定閾値S1を超えないままで第2ターマー値TIM2以上経過すると、第2クラッチ5(CL2)が固着であると判定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 車両負荷が大きいときに第2クラッチの過剰な発熱を抑制可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータの間に第1クラッチを有し、モータと駆動輪の間に第2クラッチを有するハイブリッド車両において、車両負荷が所定値以上のときは、エンジンを作動させた状態で第1クラッチを解放し、モータをエンジン回転数よりも低い回転数として第2クラッチをスリップ締結することとした。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
車両の協調制御装置
【課題】横滑り防止装置およびトラクションコントロール装置の作動が抑制されたときに協調制御が的確に行う。
【解決手段】スイッチSWが横滑り防止装置VSAおよびトラクションコントロール装置TCSの作動を抑制する位置にあるとき、リヤディファレンシャルギヤDrのヨーモーメント付加要求量および横滑り防止装置VSAのヨーモーメント付加要求量の符号が同一の場合には、絶対値が大きい方からリヤディファレンシャルギヤDrのヨーモーメント制御量を算出し、両ヨーモーメント付加要求量の符号が異なる場合には、横滑り防止装置VSAのヨーモーメント付加要求量からリヤディファレンシャルギヤDrのヨーモーメント制御量を算出する。横滑り防止装置VSAおよびトラクションコントロール装置TCSの作動が抑制された状態でも協調制御による高い精度でヨーモーメント制御量を算出し、単独制御する場合に比べて良好な車両挙動を維持できる。
(もっと読む)
車両制御装置
【課題】 スムーズな発進を行うことができる車両制御装置を提供する。
【解決手段】 ドライバのブレーキペダル操作無しでもホイルシリンダ液圧を保持し所定の条件が成立したときに液圧を減圧するブレーキCUと、エンジン32の駆動力を前輪FL,FRと後輪RL,RRとに対して任意の割合で配分可能な4WDカップリング39と、所定の条件が成立したとき、後輪RL,RRへの駆動力配分量を増加させる駆動力配分変更部33cと、を備えた。
(もっと読む)
電動車両の制御装置
【課題】走行シーンに応じて駆動力制御と変速制御の間で適切に優先付けすることで、走行シーンにかかわらずシステム保護と運転性向上のバランスを図ることができる電動車両の制御装置を提供すること。
【解決手段】電動機を含む複数の動力源と、電気無段変速機10と、摩擦クラッチ7を有する機械有段変速機6と、駆動力制御手段と、機械有段変速機6の変速制御手段と、を備えている。このハイブリッド車両において、駆動力の増減情報と車速の増減情報を取得し、駆動力指令と変速指令の同時出力時であり、かつ、駆動力と車速のうち少なくとも一方が増加する場合、駆動力制御より変速制御を優先する制御を行い、駆動力指令と変速指令の同時出力時であり、かつ、駆動力と車速のうち少なくとも一方が減少する場合、変速制御より駆動力制御を優先する制御を行う駆動力/変速協調制御手段を設けた。
(もっと読む)
車両の制御装置
【課題】ドライバに違和感を与えることなく車両の発進性能を向上させることが出来ることが出来るようにする。
【解決手段】車両10のエンジン11を自動停止/自動再始動させる自動停止再始動手段42と、ドライバによる加減速要求を検出する加減速要求検出手段32と、検出された加減速要求に応じたエンジン11の出力トルクを要求トルクTRQreqとして検出する要求トルク検出手段81と、エンジン11が自動再始動した場合は、検出された要求トルクTRQreqに応じて、エンジン11と変速機変速機構19との間に介装された自動クラッチ18の係合度合が変化する割合である係合スピードを設定する係合スピード設定手段83とを備えて構成する。
(もっと読む)
挙動制御装置
【課題】車両が旋回走行するとき、車両の挙動に運転者が違和感を持つことを回避できる、挙動制御装置を提供する。
【解決手段】車両が旋回走行する際の目標横加速度を求め、目標横加速度に基づいて目標ヨーレートを求め、車両が旋回走行する際の実ヨーレートを目標ヨーレートに近づけるように車両の挙動を制御する、挙動制御装置において、車両が旋回走行する際の半径に基づいて、将来の横加速度を推定する第1推定手段(ステップS)と、車両における現在の横加速度に基づいて、将来の横加速度を推定する第2推定手段(ステップS2)、と、車両における現在のステアリングホイールの操舵角に基づいて、将来の横加速度を推定する第3推定手段(ステップS3)と、第1推定手段(ステップS1)または第2推定手段(ステップS2)または第3推定手段(ステップS3)により推定された横加速度のうち、最小値を目標横加速度として選択する選択手段(ステップS7)とを備えている。
(もっと読む)
車両運動制御装置
【課題】車両挙動を制御する複数のデバイスが共有するセンサの故障時における車両挙動の安定化を実現する。
【解決手段】CANを介して車両制御を行うデバイス1・デバイス2・デバイス3と、ヨーレートセンサ4とが接続され、各デバイスはそれぞれの運動制御にヨーレート検出値を用いる。ヨーレートセンサの故障を例えばデバイス3が検知した場合には、他のデバイス2・3がその故障を検知していない場合でも、ゲインを低減する。1つのデバイスの制御停止により残りのデバイスがそれを補うために制御量を大きくして車両挙動に悪影響を及ぼしてしまう場合でも、ゲインの低下により、その影響を小さくすることができ、車両運動の安定化を保持できる。また、残りのデバイスにおいてもセンサ故障が確定して制御停止に移行する場合にも、小さなゲインにより制御量を下げておいた状態から機能停止することができるため、車両挙動の急変を抑制することができる。
(もっと読む)
車両の駆動力制御装置及びその方法
【課題】主駆動輪のスリップ時に従駆動輪を最適に制御することである。
【解決手段】車両の駆動力制御装置は、主駆動輪がスリップしたらモータの駆動によって従駆動輪を駆動するものであり、主駆動輪の駆動力とモータ4の駆動によって駆動される従駆動輪の駆動力との加算値として車両総駆動力を算出し(ステップS690)、車両総駆動力の増加方向に主駆動輪のスリップ状態を制御する(ステップS700、ステップS710、ステップS720)。
(もっと読む)
車両用制御装置、車両用制御装置の制御方法、駆動力配分制御装置及び駆動力配分制御装置の制御方法
【課題】トルク配分装置の過熱を防止しつつ、車輪のスリップを抑制できる車両用制御装置、車両用制御装置の制御方法、駆動力配分制御装置及び駆動力配分制御装置の制御方法を提供する。
【解決手段】車両1に、各車輪12R,12L,13R,13Lに制動力を付与するブレーキ装置と、ブレーキ装置の作動を制御して車両1の走行安定性を向上させるESC制御を実行するESCECU33とを搭載した。4WDECU31は、トルク配分装置6の温度を推定する。そして、4WDECU31は、推定された温度が閾値温度よりも大きい場合には、スリップ閾値を第1の閾値から該第1の閾値よりも小さい第2の閾値に変更させるための閾値用制御信号S1をESCECU33に出力するようにした。
(もっと読む)
車両の制御装置及び制御方法
【課題】アイドルストップ状態からのエンジン再始動時に、エンジントルク又はエンジン回転数の急上昇を、路面の勾配に応じて抑制することを可能にする手段を提供する。
【解決手段】自動車Wは、エンジン1と、ロックアップクラッチ26を有するトルクコンバータ20と、自動変速機10とを搭載している。自動車Wの停止時において自動変速機10がDレンジにあるときに、エンジン停止条件が成立すればコントロールユニットによってエンジン1が停止させられ、この後エンジン再始動条件が成立すればエンジン1が再始動させられる。エンジン再始動条件が成立したときには、ロックアップクラッチ26をスリップ締結することにより、エンジン再始動時におけるエンジン回転の急上昇が抑制され、エンジン1のローリング振動が抑制される。また、エンジン再始動時におけるエンジントルクないしはエンジン回転数の上昇率が路面の勾配に応じて好ましく制御される。
(もっと読む)
ハイブリッド型産業車両のインチングペダルシステム
【課題】ハイブリッド型フォークリフトにおいて、半クラッチ状態にして低速・高トルク走行を実現する。
【解決手段】エンジンと電動モータ2の駆動力により駆動輪が回転駆動するハイブリッド型フォークリフトに、インチングペダル33を備えた。低速走行時にアクセルペダル31を踏みながらインチングペダル33を踏み込んでいくと、コントローラ100は、インチングペダル33の踏み込みに合わせてクラッチを接続状態から半クラッチ状態に移行し低速高トルク走行を可能とし、更に踏み込むとインバータ5により走行用電動モータ2の駆動力を弱め、更に踏み込むとインバータ5により走行用電動モータ2により制動回生をさせ、更に踏み込むとブレーキペダル32が機械的に押し下げられて機械式ブレーキが作動する。高速走行時にアクセルペダル31を踏みながらインチングペダル33を踏んでも、エンジン回転数をアイドリング回転数に保持して燃費悪化を抑制する。
(もっと読む)
1 - 20 / 41
[ Back to top ]