
Fターム[3D043EF14]の内容
動力伝達装置の配置〜駆動 (10,444) | 4WDにおける制御、制御対象 (1,466) | 4WD制御 (591) | 車輪トルクの制御 (270)
Fターム[3D043EF14]に分類される特許
1 - 20 / 270
車両用駆動装置
【課題】制御を簡易化でき、ヨーモーメントを発生させることのできる車両用駆動装置を提供する。
【解決手段】後輪駆動装置1は、左後輪LWrを駆動する電動機2Aと、電動機2Aと左後輪LWrとの動力伝達経路上に設けられた遊星歯車式減速機12Aと、を有する左車輪駆動装置と、右後輪RWrを駆動する電動機2Bと、電動機2Bと右後輪RWrとの動力伝達経路上に設けられた遊星歯車式減速機12Bと、を有する右車輪駆動装置と、電動機2A、2Bを制御する制御装置8と、を備える。遊星歯車式減速機12A、12Bのサンギヤ21A、21Bにそれぞれ電動機2A、2Bが接続され、プラネタリキャリア23A、23Bにそれぞれ左後輪LWr及び右後輪RWrが接続され、リングギヤ24A、24B同士が互いに連結される。制御装置8は、リングギヤ24A、24Bの回転を目標回転に制御する回転制御を行なうとき、電動機2A、2Bのいずれか一方のみを駆動制御してリングギヤ24A、24Bの回転を制御する。
(もっと読む)
車両用駆動装置及び車両

【課題】電動機の回転動力を確実に車輪に伝達することができ、且つ、消費エネルギーを低減可能な車両用駆動装置及び車両を提供する。
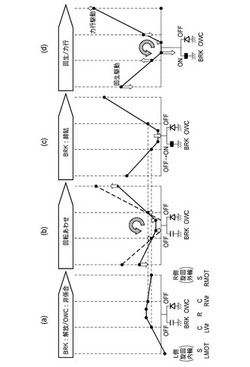
【解決手段】後輪駆動装置1は、車両の駆動力を発生する電動機2A、2Bと、電動機と後輪との動力伝達経路上に設けられた油圧ブレーキ60A、60Bと、電動機と油圧ブレーキとを制御する制御装置と、油圧ブレーキと並列に設けられた一方向クラッチ50とを備え、制御装置は少なくとも電動機側の順方向の回転動力により車両が走行し電動機の順方向の回転動力が所定値以下のときに油圧ブレーキを締結するとともに、電動機の順方向の回転動力が所定値より大きいときに油圧ブレーキを解放するか、又は電動機の順方向の回転動力が所定値以下のよりも油圧ブレーキの締結力を弱くする。
(もっと読む)
車両
【課題】電動機の連れ回りにおける損失を抑制可能な車両を提供する。
【解決手段】後輪駆動装置1の駆動力が略零の状態で車両3を駆動するとき若しくは前輪駆動装置6の駆動力のみによって車両3を駆動するときに、制御装置8は、油圧ブレーキ60A、60Bを締結して接続状態とするとともに、油圧ブレーキ60A、60Bを接続状態とすることによって後輪Wrに伝達される電動機2A、2Bと動力伝達経路の少なくとも一方の損失を低減するように電動機2A、2Bを制御する損失低減制御を行なう。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】車両の安定性を向上可能な制御装置を提供すること。
【解決手段】車両の前輪駆動力及び後輪駆動力を制御する制御装置は、主駆動輪駆動力及び副駆動輪駆動力を制御する第1の制御手段であって、前記主駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の一方であり、前記副駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の他方である、第1の制御手段と、前記副駆動輪駆動力を制限する副駆動輪制限駆動力を前記第1の制御手段に送る第2の制御手段と、を備える。前記第2の制御手段は、基準駆動力を準備する準備部と、前記副駆動輪制限駆動力の減少を制限する第1の制限部と、前記副駆動輪制限駆動力の増加を制限する第2の制限部と、を有する。前記第2の制御手段は、前記第1の制限部及び前記第2の制限部を介して、前記基準駆動力を前記副駆動輪制限駆動力として前記第1の制御手段に送る。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】過小な制限駆動力の算出を抑制可能な制御装置を提供すること。
【解決手段】車両に働く駆動力を制御する制御装置は、前記駆動力を制御する第1の制御手段と、前記駆動力の制限を前記第1の制御手段に要求する第2の制御手段と、を備える。前記第2の制御手段は、前記第1の制御手段から出力される前記駆動力を入力する入力部と、前記駆動力を制限する制限駆動力を第1のモードで算出する算出部と、を有する。前記駆動力と前記制限駆動力との第1の差が閾値以上である場合、前記算出部は、前記第1の差が大きくなることを制限するように、前記制限駆動力を前記第1のモードに代わりに第2のモードで算出する。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】不必要な算出を抑制可能な制御装置を提供すること。
【解決手段】車両に働く駆動力を制御する制御装置は、前記駆動力を制御する第1の制御手段と、前記駆動力の制限を前記第1の制御手段に要求する第2の制御手段と、を備える。前記第2の制御手段は、前記第1の制御手段から出力される前記駆動力を入力する入力部と、前記駆動力を制限する制限駆動力を算出する算出部と、を有する。前記制限駆動力から前記駆動力を減算した第1の値が閾値以上である場合、前記算出部は、前記制限駆動力よりも大きい第2の値を出力する。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】主駆動輪のスリップを抑制可能な制御装置を提供すること。
【解決手段】変速機を含む車両の前輪駆動力及び後輪駆動力を制御する制御装置は、主駆動輪駆動力及び副駆動輪駆動力を制御する第1の制御手段であって、前記主駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の一方であり、前記副駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の他方である、第1の制御手段と、前記変速機の変速比が変化したか否かを検出する第2の制御手段と、を備える。前記変速比が変化したことが前記第2の制御手段によって検出される場合、前記第1の制御手段は、前記副駆動輪駆動力を増加させる一方、前記第1の制御手段は、前記主駆動輪駆動力を減少させる。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う可変フィルタ処理部814、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809、建設車両の変速機の状態を判定する変速状態判定部808を備え、時定数変更部809は、ロックアップの解除指令が出力されてから一定時間経過していない状態にあると判定されたら、可変フィルタ処理部814の時定数を変更するロックアップ切換時定数変更部813を備える。
(もっと読む)
電気自動車
【課題】 左右の車輪を個別に駆動する複数のモータを備えた電気自動車において、1輪分のモータ異常が発生した場合に、停止させることなく、車両姿勢の安定化を図って走行を可能とする。
【解決手段】 各モータ6の異常を検出するモータ異常検出手段37と、片側異常時対応制御手段38とを設ける。片側異常時対応制御手段38は、モータ異常検出手段37により、車両の同じ前後方向位置にある左右のいずれか一方の車輪2,3のモータ6にモータ停止以外の異常が検出された場合に、同じ前後方向位置にある他方の車輪2,3のモータ6を、異常の検出されたモータ6の動作状態と同じ動作状態に近づくように制御する。この制御は、他方のモータ6のトルクを強制的に減じる制御、回生ブレーキとして作用させる制御、他方の車輪2,3のブレーキ作動の制御等とする。
(もっと読む)
トルク配分装置およびトルク配分方法
【課題】駆動輪のスリップ状態を考慮したトルク配分がおこなえること。
【解決手段】トルク配分装置100は、入力された全トルク指令値を取得する全トルク指令値取得部101と、搭載モータのモータ効率マップ104を取得する効率マップ取得部105と、車両の車体速度を検出する車体速度検出部102aと、駆動輪における駆動輪回転速度を検出する駆動輪回転速度検出部102bと、車体速度及び駆動輪回転速度に基づいて駆動輪のスリップ率を算出するスリップ率算出部103と、スリップ率に基づいて駆動輪回転速度とトルクの関係を示す動作線上の効率値を示す効率変化式を作成し、動作線上の効率変化式の最適効率トルク値を算出する算出部106と、全トルク指令値と最適効率トルク値に基づいて各々のモータに対するトルク配分値を算出する配分部107と、算出したトルク配分値に基づいて各々のモータへトルク配分制御する制御部108と、を備える。
(もっと読む)
トルク配分装置およびトルク配分方法
【課題】駆動輪のスリップ状態を考慮したトルク配分がおこなわれること。
【解決手段】入力された全トルク指令値を取得する全トルク指令値取得部101と、搭載モータのモータ効率マップ104を取得する効率マップ取得部105と、車両の車体速度を検出する車体速度検出部102aと、駆動輪における駆動輪回転速度を検出する駆動輪回転速度検出部102bと、車体速度及び駆動輪回転速度に基づいて、駆動輪におけるスリップ率を算出するスリップ率算出部103と、スリップ率に基づいて、駆動輪回転速度とトルクの関係を示す動作線上の効率値を示す効率変化式を作成し、動作線上の効率変化式の最適効率トルク値を算出する算出部106と、全トルク指令値、および、最適効率トルク値に基づいて、各々のモータに対するトルク配分値を算出する配分部107と、算出したトルク配分値に基づいて、各々のモータへトルク配分制御する制御部108と、を備える。
(もっと読む)
車両のトランスミッションの切替過程中に牽引力に影響を与えるための方法及び装置
【課題】異なる車軸に作用する複数の駆動システムを備えた車両における切替の快適性を向上させる。
【解決手段】少なくとも2つの駆動車軸を有する車両のトランスミッションの切替過程中に牽引力に影響を与えるための装置及び方法に関する。第1の車軸の駆動システムが、トランスミッションの切替過程時に第2の車軸で生じる牽引力の中断を少なくとも部分的に補償するように制御され、第2の駆動車軸における有効トルクの変更が、できるだけ牽引力の下降及び上昇なしに、特にこれに伴い感じられる衝撃なしに行われることを保証するために、切替の希望に応じてクラッチの制御を遅らせる。
(もっと読む)
四輪駆動車両の駆動力配分制御装置
【課題】車両挙動を不安定にしたり、カント路面を駆け上がるモーメントを発生させることのない、オーバーステアおよびアンダーステア緩和用左右駆動力差制御を提供する。
【解決手段】S14でオーバーステアと判定する場合、S17で後輪合計駆動力用のフィードバック制御係数K1を0とし、後輪駆動力差用のフィードバック制御係数K2も0とすることで、二輪駆動走行状態にする。よって当該オーバーステア状態で、四輪駆動走行されることによる旋回走行不安定を回避することができる。S15でアンダーステアと判定する場合、S18でK1=1とし、K2=0とすることにより、四輪駆動走行させるも左右後輪間に駆動力差を設定しない。これにより、当該アンダーステア状態で四輪駆動走行による優れた走破性を享受しつつ、左右後輪間に駆動力差が設定されることによる、カント路面駆け上がり現象を回避することができる。
(もっと読む)
車両の左右輪駆動力配分制御装置
【課題】旋回初期において旋回挙動の立ち上がり応答が速やかになるような定常制御分を与え得る左右輪駆動力配分制御装置を提供する。
【解決手段】運転者が定常的に要求している車両旋回挙動のための基本的な左右後輪駆動力差定常制御演算値に乗ずる後輪駆動力差決定ゲインGain を(a)に実線で示すごとく、横加速度Gyが旋回初期判定値Gys未満の旋回初期においては、1よりも大きく、横加速度Gyの低下につれ大きくなるAに設定する。よって、基本的な左右後輪駆動力差定常制御演算値に後輪駆動力差決定ゲインGain=Aを乗じて得られる最終的な左右後輪駆動力差定常制御分と、左右後輪駆動力差過渡制御分との和値である左右後輪駆動力差にフィードバック制御係数を乗じて得られた最終的な後輪駆動力差ΔTcLRは、(b)に実線で示すごとく旋回初期(横加速度Gy<Gys)において増大されることとなり、初期旋回応答を向上させることができる。
(もっと読む)
車両の走行用油圧回路
【課題】 車輪のスリップや空転による走行不能を防止する。
【解決手段】 前後輪用の油圧ポンプ5と6に、左右の前輪1L,1Rと後輪2L,2R用の油圧モータ3L,3Rと4L,4Rを、先端側を分岐させた前進時供給側圧油管路13,22と後進時供給側圧油管路14,23を介して並列に接続する。前進時供給側分岐圧油管路13aと13b,22aと22bに、開閉制御弁15aと15b,24aと24bを設け、これと並列接続になるようにフローディバイダー20,27を設ける。更に、開閉制御弁15aと15b,24aと24bの閉位置への切換え操作用のパイロット弁18を備える。一方の前輪1L又は1Rや後輪2L又は2Rに空転が生じた場合は、開閉制御弁15a,15b,24a,24bを閉位置に切換え、作動油12をフローディバイダー20,27に通すことで、左右の油圧モータ3Lと3R,4Lと4Rへ同量の作動油12を供給させる。
(もっと読む)
制御装置
【課題】車両間を繋いで作動油を流通するホースを不要にできることで、ホースを支持したり保護したりする付帯作業を不要にしつつ、各車両の走行を応答性良く同調させることができる制御装置を提供すること。
【解決手段】各車両の管路9の圧力が取得され、制御装置50は、各車両の圧力を比較して得られる圧力差が所定範囲内にあるかを判断する。圧力差が所定範囲内にないと判断される場合に、各車両の圧力に基づいて油圧ポンプ8が供給する作動油量を調整し、車輪3aに回転駆動力を与える油圧モータ3bの回転速度を調整する。これにより、車両間を繋いで作動油を流通するホースを不要にすることができ、ホースを支持したり保護したりする付帯作業を不要にしつつ、各車両の走行を応答性良く同調させることができる。
(もっと読む)
車両
【課題】車両の進路上の路面変化に対応した適切な駆動力配分を前以て実現することができる車両を提供する。
【解決手段】車両のメインECU3は、第1情報取得部4Aにより取得された第1情報から導出される第1位置の路面摩擦係数である第1摩擦係数μ1と、第2情報取得部4Bにより取得された第2情報から導出される第2位置の路面摩擦係数である第2摩擦係数μ2とから、車両の総駆動力の目標値を決定する。そして、総駆動力の目標値を満たし且つ第1摩擦係数μ1に対応したスリップ限界を超えないように、第1駆動力および第2駆動力の目標値を決定する。
(もっと読む)
左右独立駆動車両における電動機の制御装置
【課題】電動機と車輪とを連結するシャフトやギヤなどに掛かる捩れを抑制することのできる制御装置を提供する。
【解決手段】左右一対の前輪を個別に駆動するようにトルクを出力する電動機が設けられた左右独立駆動車両における電動機の制御装置において、前記電動機に連結された車輪回転数を変動させる要因を検出する外乱要因検出手段と、該外乱検出手段により前記電動機に連結された車輪の回転数を変動させる要因が検出された場合に、前記電動機の制御をトルク制御から回転数制御に切り換える制御切り換え手段とを備えている。
(もっと読む)
4輪駆動車の駆動力配分制御装置
【課題】旋回時におけるオーバーステア状態を抑制することが可能な4輪駆動車の駆動力配分制御装置を提供する。
【解決手段】4輪駆動車101の駆動力配分制御装置1は、エンジン102の駆動力をフロントドライブ軸105とプロペラシャフト109とに、これらの差動を許容して配分する差動機構1Aと、フロントドライブ軸105とプロペラシャフト109との差動を制限するクラッチ20と、クラッチ20の締結力を制御する制御部10とを備え、制御部10は、4輪駆動車101がオーバーステア状態となったときに、クラッチ20の締結力を低減する。
(もっと読む)
ハイブリッド自動車の差動制限制御装置
【課題】前後軸間の差動制限を行う際、車両振動や駆動力変化を抑制するハイブリッド自動車の差動制限制御装置を提供する。
【解決手段】前後軸間の実回転数差及び目標回転数差を演算し、実回転数差を目標回転数差に追従させる副駆動軸補正トルクを演算し、副駆動軸補正トルクの最大値を制限する最大差動制限トルクを演算し、副駆動軸補正トルクの絶対値の上限値を最大差動制限トルクで制限したリミット出力を演算し、総駆動トルクから配分された副駆動軸駆動トルクをリミッタ出力で補正し、補正した副駆動軸駆動トルクとなるように、電動モータを制御して、差動制限を行う。
(もっと読む)
1 - 20 / 270
[ Back to top ]