
Fターム[3D044AD21]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・制御対象 (505) | ブレーキ装置 (155)
Fターム[3D044AD21]に分類される特許
21 - 40 / 155
ドライバ状態検出装置、車載警報装置、運転支援システム
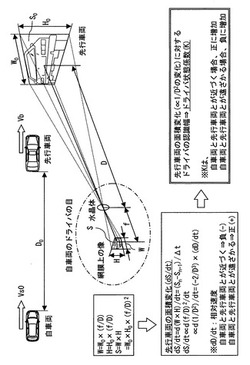
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。
(もっと読む)
走行制御装置

【課題】 先行車のロストを適切に判定する。
【解決手段】 先行車を検出して車間距離を計測し、先行車との車間距離が目標車間距離となるように先行車追従制御を行うとともに、所定時間の間、先行車を検出できなかった場合に先行車を見失ったと判定し、先行車追従制御を解除する走行制御装置において、先行車を検出できなくなったときに先行車の見失い原因を推定し、先行車の見失い原因に応じて前記所定時間を変更する。
(もっと読む)
自動車の追従走行システム
【課題】
自車両と前方車両との目標車間距離を維持しながら自車両を前方車両に追従走行させる自動車の追従走行システムにおいて、自車両の走行環境に適合した目標車間距離を迅速・確実に設定することを課題とする。
【解決手段】
追従走行システムは、自車両と前方車両との目標車間距離の設定に用いる補正係数を道路毎及び月日時刻毎の過去の交通情報に基いて生成する生成部22aと、前記補正係数を道路毎及び月日時刻毎に記録する記録部22bと、自車両が走行中の道路を検出するナビゲーションシステム20と、現在の月日時刻を検出するコントロールユニット10とを有し、前記目標車間距離は、前記記録部22bで記録されている補正係数のうちナビゲーションシステム20で検出された道路及びコントロールユニット10で検出された月日時刻に該当する補正係数を用いて設定される。
(もっと読む)
走行制御装置
【課題】 自動発進時の運転感覚を改善する。
【解決手段】 先行車追従制御により先行車の後に自車が停車しているときに、先行車追従制御による自車の自動発進を許可するための発進許可操作部材が操作され、かつ、先行車の発進が検出され、かつ、ブレーキペダルの踏み込み状態から解放状態への変化が検出されると、自車を自動発進させる。
(もっと読む)
自動車の追従走行装置
【課題】
自動車の追従走行装置において、自車両のギクシャク運転を抑制し、乗員の乗り心地や安心感の向上を図ることを課題とする。
【解決手段】
追従走行装置1は、車間距離検出手段11で検出された前方車両Wfと自車両Wとの車間距離L1が目標車間距離Ltに維持されるように自車両Wの車速vを制御する車速制御手段17,18を備えている。追従走行装置1は、前々方車両Wffと前方車両Wfとの車間距離L3が所定の車間距離Lmよりも短くなったときは前々方車両Wffと自車両Wとの車間距離L2が第2の目標車間距離設定手段10で設定された目標車間距離Ltに維持されるように自車両Wの車速vを制御するコントロールユニット10を備えている。
(もっと読む)
自動車の追従走行装置
【課題】
自動車の追従走行装置において、自車両のギクシャク運転を抑制し、乗員の乗り心地や安心感の向上を図ることを課題とする。
【解決手段】
追従走行装置1は、車間距離検出手段11で検出された前方車両Wfと自車両Wとの車間距離L1が目標車間距離Ltに維持されるように自車両Wの車速vを制御する車速制御手段17,18を備えている。追従走行装置1は、前々方車両Wffと前方車両Wfとの車間距離L2が所定の車間距離Lmよりも短くなったときは短くなっていないときよりも車速制御手段17,18の制御感度を鈍化させるコントロールユニット10を備えている。
(もっと読む)
車両の制御装置
【課題】 路面状況による走行性能の低下を防止する。
【解決手段】 車両10において、ECU100は、アシストトルク制御処理を実行する。アシストトルク制御処理では、左右前輪に備わる車輪速センサの出力値に基づいて、スリップ率SLが算出される。運転者がハンドル11を操作して車両を操舵するに際し、操舵方向に対してスリップ率が増加特性となる場合には、ECU100はEPS500を制御して操舵トルクをアシストするためのアシストトルクTAを減少させる。一方で、操舵方向に対してスリップ率が減少特性となる場合には、ECU100はEPS500を制御してアシストトルクTAを増加させる。この結果、車輪のグリップ度が増加する方向へ車両10が誘われる。
(もっと読む)
車両用走行制御装置
【課題】 クラッチペダルが操作されているときであっても走行制御が可能となり、走行性能を向上することができる車両用走行制御装置を提供する。
【解決手段】 運転者による走行制御開始要求操作を検出する走行制御開始要求操作検出手段と、走行制御手段による走行制御中に運転者によるクラッチペダル操作が検出された場合には内燃機関の回転数をシフト段に応じた回転数に制御する回転数制御手段と、を備える。クラッチペダル操作検出手段により運転者のクラッチペダル操作が検出されているときに走行制御開始要求操作検出手段により運転者の走行制御開始要求操作が検出された場合には、走行制御手段は走行制御を開始するとともに、回転数制御手段は内燃機関の回転数をシフト段に応じた回転数に制御する回転数制御を開始する。
(もっと読む)
車両用走行制御装置
【課題】 クラッチペダルが操作されているときであっても走行制御が可能となり、走行性能を向上することができる車両用走行制御装置を提供する。
【解決手段】 車両に搭載された内燃機関の出力を駆動輪に伝達する手動変速手段と、その変速段を検出する変速段検出手段と、運転者によるクラッチペダル操作を検出するクラッチペダル操作検出手段と、内燃機関の回転数を検出する回転数検出手段と、車両の走行速度を検出する走行速度検出手段と、目標車速を設定する目標車速設定手段と、その出力に基づいて車両を加減速させる加減速手段とを備える。検出された変速段と走行速度に基づいて内燃機関の目標回転数を算出する目標回転数算出手段と、走行制御手段による走行制御中に運転者によるクラッチペダル操作が検出された場合には、内燃機関の回転数を目標回転数に基づいて制御を行う回転数制御手段とを備えた。
(もっと読む)
速度制御装置
【課題】 運転手の認識情報と視線情報を取得し、運転手の無意識の判断により車両の速度を的確な状態にすることのできる速度制御装置を提供する。
【解決手段】 運転手の脳波情報を取得する入力信号取得手段2と前記入力信号取得手段2より得られた入力信号をもとに、運転手20の脳波及びナビゲーションシステムのデータベースより自車位置の近辺に信号機があるかを検索し、近くの信号機の有無の判断結果から赤い信号機を認識したか否かを判断し、運転手の視線を取得する視線取得手段4と、前記視線取得手段4より得られた画像をもとに運転手の視線の向きから運転手が前方を見ている否かを判断し、速度を制御する速度制御判定手段14を設けることにより、車両の速度を的確な状態にする効果を有する速度制御装置を提供する。
(もっと読む)
車両の走行制御装置
【課題】車速制御と車線逸脱防止制御との協調を図り、運転者に違和感を与えてしまうのを防止する。
【解決手段】車線逸脱防止装置は、目標ヨーモーメントMsを車両に付与することで、自車両が走行車線から逸脱するのを防止する。そして、その目標ヨーモーメントを逸脱傾向の大きさを示す値とヨーモーメント補正ゲインKsとの乗算値として算出するようにして、そのヨーモーメント補正ゲインKsを設定車間距離が大きくなるほど、小さくなるように設定する。これにより、設定車間距離が大きくなるほど、前記目標ヨーモーメントMsが小さく補正される。
(もっと読む)
車線逸脱防止装置
【課題】ブレーキ冷間時のブレーキ制動力低下の影響を抑制して、車線逸脱防止制御として所望のヨーモーメントを自車両に付与する。
【解決手段】車線逸脱防止装置は、エンジンの始動状態(ステップS31、ステップS32)、ブレーキの作動状態(ステップS34)、ワイパーの作動状態(ステップS37)、外気温及び自車速の状態(ステップS39)に基づいて、制動力発生手段の温度を評価するブレーキエネルギ評価指標値Ecbrを算出し(ステップS41)、そのブレーキエネルギ評価指標値Ecbrに基づいて、車線逸脱防止制御の制御量としての目標ヨーモーメントを補正する(ステップS41、ステップS42)。
(もっと読む)
車線逸脱防止装置及び車両の走行制御装置
【課題】車速制御で減速を要求しているときには、その減速要求を満たしつつも、車線逸脱防止する。
【解決手段】車両の走行制御装置は、逸脱傾向がある場合において、車速制御が自車両を減速しようとしているとき(ステップS31)、車速制御に換えて車線逸脱防止制御を行うとともに、車線逸脱防止制御用の制動力を、自車両が走行車線から逸脱するのを防止しつつも、前記減速の減速度を満たす値にする調整をする(ステップS32〜ステップS37)。
(もっと読む)
車両の自動制動装置
【課題】 本発明は車両停止中における制動を制御する車両の自動制動装置に関し、ブレーキシステムが不作動状態となっても車両の停止状態の保持及びACCシステムの適正動作を保障することを課題とする。
【解決手段】 ブレーキシステムを制御することにより走行制御を行う制動制御手段を有する車両の走行制御装置において、制動制御手段によるブレーキシステムのブレーキ動作により車両が停止している際、ブレーキシステムの不作動を検出する不作動検出手段(ステップ16A)と、前記不作動が検出された場合にブレーキシステム以外の走行機能停止手段を作動させる不作動時制御手段(ステップ18A)とを設ける。
(もっと読む)
車両の制御装置
【課題】 ブレーキ振動あるいは異音の発生を防止もしくは抑制するための制御が行われる際に、車両の走行状態が変化して乗員に違和感を与えてしまうことを回避できる車両の制御装置を提供する。
【解決手段】 乗員の操作と独立して制動装置を制御して各車輪の制動トルクを設定する制動トルク設定手段と、制動装置の振動を検出する振動検出手段(ステップS101)とを備え、制動装置の振動が検出された場合に振動を抑制する車両の制御装置において、乗員の操作と独立して動力源の出力を制御して各車輪の駆動トルクを設定する駆動トルク設定手段と、車両の走行状態を検出する走行状態検出手段(ステップS102)と、制動装置の振動が検出された場合に、走行状態に基づいて制動トルクと駆動トルクとの少なくともいずれか一方を変更する振動抑制手段(ステップS104,S105)とを備えている。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
自車両の予測進路と前方障害物との重なり度合および運転者の追い越し意図を考慮して車両制御を行う車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両の前方障害物に対するリスクポテンシャルを算出し、前方障害物との接触のリスクが高い場合には、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。自車両が前方障害物を追い越す意図があると判断されると、自車両の予測進路と前方障害物との重なり度合に応じて駆動力の低下量を小さくするとともに、アクセルペダルに発生する操作反力を小さくする。アクセルペダル操作状態を自車速に応じて設定される閾値と比較して、運転者の追越意図を判断する。追越意図ありと判断された場合は、自車速が速いほど駆動力および操作反力の調整量を大きくする。
(もっと読む)
車両制御補助装置及び車両制御補助方法
【課題】 運転者が理想のブレーキ操作量に対する現在のブレーキ操作量の過不足を適切に判断することができ、それによって容易に適切なブレーキ操作を行えるようにする。
【解決手段】 自車両の現在車速を検出する車速検出手段18と、自車両のブレーキ操作量を検出するブレーキ操作量検出手段21と、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段24と、減速目標点における目標車速を決定する目標車速決定手段25と、現在車速、減速目標点及び目標車速に基づいて、減速目標点において目標車速となるための目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定手段47と、理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成手段28と、生成された報知情報を報知する報知手段48と、を備える。
(もっと読む)
車両用走行制御装置
【課題】定速走行制御時に車線逸脱防止制御が作動して車両が減速した後に、再び車両が加速されるのを防ぐ。
【解決手段】定速走行制御が行われている時に、車線逸脱防止制御が作動した場合に、車線逸脱防止制御が作動した後の車速が設定速度より低い場合には、設定速度を、車線逸脱防止制御後の車速に変更する。これにより、車線逸脱防止制御が作動して、車速が低下した後に、車両が設定速度まで加速されるのを防ぐことができる。
(もっと読む)
車両の制御装置
【課題】 運転者の負担を増大させることなく、衝突事故時の乗員保護をより効果的に行う。
【解決手段】 自車両の衝突が検知された場合に、所定のタイミングでブレーキ装置5を作動させて自動ブレーキをかける衝突制御手段2と、運転者によるブレーキ操作が行われていることを検出するブレーキ操作検出手段16とを備える車両の制御装置において、上記衝突制御手段2の制御に基づいて作動する自動ブレーキの制動力を、上記ブレーキ操作検出手段16によって運転者によるブレーキ操作が検出されたときの方が、ブレーキ操作が検出されなかったときに比べて大きくなるように設定する。
(もっと読む)
車両の走行補助装置
【課題】 運転者におけるハンドル把持の程度に応じてACCシステムによる加速制御を規制することにより運転者における違和感の発生を抑制して円滑なオートクルーズ制御を実行し得る車両の走行補助装置を提供する。
【解決手段】 車両を加減速させることにより、自車両を予め設定された目標車速となるように走行させる定速制御、および自車両の前方に存在する先行車両との車間距離を予め設定された目標車間距離となるように走行させる追従制御の少なくともいずれか一方の制御を行うオートクルーズ制御手段と、運転者が適正な保持力でハンドルを把持していないことを検出する不適正把持検出手段と、上記オートクルーズ制御手段による制御中に、この不適正把持検出手段からの検出結果に基づいて運転者が適正にハンドルを把持していないことを検出した場合に、上記オートクルーズ制御手段による加速制御を規制する自動加速規制手段とを備える。
(もっと読む)
21 - 40 / 155
[ Back to top ]