
Fターム[3D044AD21]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・制御対象 (505) | ブレーキ装置 (155)
Fターム[3D044AD21]に分類される特許
41 - 60 / 155
車両の加速度算出装置及び車両の走行制御装置
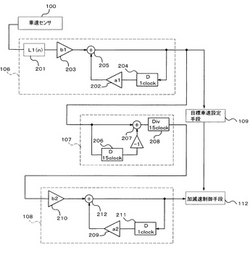
【課題】 加速度算出値に含まれるノイズを抑制できると同時に、フィルタ処理を行う際に応答遅れが大きくならないようにした、車両の加速度算出装置及びこれを用いた、車両の走行制御装置を提供する。
【解決手段】 車両の車速情報を検出する車速検出手段100と、該車速検出手段によって検出された該車速情報を時間微分することにより予め設定された演算周期毎に該車両の車速微分値を加速度情報として算出する車速微分値算出手段107とをそなえ、該車速微分値算出手段107は、演算周期nにおいて入力された該車速情報と所定周期数r(例えば、r=15)だけ前の演算周期(n−r)において入力された該車速情報とに基づいて、該加速度情報を算出する。
(もっと読む)
車両の制御装置

【課題】 衝突予知の誤判断によって乗員が違和感を受けるのを防止しつつ、衝突時にブレーキ装置を適正に作動させることができるようにする。
【解決手段】 自車両の前方に存在する前方物体と自車両との距離および相対速度を検出する前方物体検出手段9と、この前方物体検出手段9の検出結果に基づいて上記前方物体と自車両とが衝突する状態にあることが予知されたときに、衝突が発生すると予知された衝突予知時点よりも前にブレーキ装置5を作動させる制御を実行する衝突予知制御手段2と、自車両の走行速度を検出する車速検出手段(車速センサ6)と、この車速検出手段により検出された自車両の走行速度が大きい場合には走行速度が小さい場合に比べてブレーキ装置の作動タイミングを遅らせるように上記ブレーキ装置5の制御条件を補正する制御条件補正手段3とを設けた。
(もっと読む)
車間距離情報の処理装置および車間距離制御装置
【課題】 車間距離が急激に変化した場合でも車間距離を速やかに認識できるようにして応答性を向上させることができるようにした、車間距離情報の処理装置および車間距離制御装置を提供する。
【解決手段】 自車両と先行車両との車間距離情報を検出する車間距離検出手段100と、車間距離情報をフィルタ処理するフィルタ手段106とを備え、車間距離情報を処理して出力する車間距離情報の処理装置において、車間距離検出手段100が検出した車間距離情報の変化率又はフィルタ手段106によってフィルタ処理されたフィルタ後車間距離情報の変化率が所定値以上の時は検出した車間距離情報を出力し、車間距離検出手段100が検出した車間距離情報の変化率又はフィルタ手段106によってフィルタ処理されたフィルタ後車間距離情報の変化率が所定値未満のときはフィルタ後車間距離情報を出力する切替手段207を備えて構成する。
(もっと読む)
相対速度算出装置および車間距離制御装置
【課題】 相対速度算出値に含まれるノイズを抑制と、相対速度算出値をフィルタ処理する際に生じる応答遅れの低減とを両立させることができるようにした、相対速度算出装置および車間距離制御装置を提供する。
【解決手段】 自車両と該自車両の前方または後方を走行する他車両との車間距離情報を検出する車間距離検出手段100と、車間距離情報に基づいて予め設定された演算周期(例えば20ミリ秒)毎に自車両と他車両との相対速度情報を算出する相対速度算出手段108とを備えた車間距離制御装置において、相対速度算出手段108は、演算周期nにおいて入力された車間距離情報と所定周期数r(例えば、r=15)だけ前の演算周期(n−r)において入力された車間距離情報とに基づいて、相対速度情報を算出する。
(もっと読む)
運転装置の制御装置
【課題】運転者の能力等に合わせて操作装置の操作性を調整でき、車両の運転を容易化することが可能な運転装置の制御装置を提供する。
【解決手段】操作レバー20を含み操作レバー20の操作位置を出力する操作装置10と、車両のブレーキ及びアクセルを動作させる駆動系60,70とを備える運転装置において、操作位置に応じて駆動系60,70の制御量を決定し制御する制御装置50であって、操作位置と駆動系60,70の制御量との関係を変更可能に形成されている。この構成によれば、ユーザの能力、好みや車両の状況に合わせて操作装置10の操作性を調整できる。
(もっと読む)
車両のオートクルーズ装置
【課題】加速中に前方車両が直前に車線変更した場合や、低速走行の前方車両が直前に車線変更した場合でも、車速の急変を生じないオートクルーズ制御となす。
【解決手段】S11で通常のオートクルーズ用の基本加減速度ABを計算する。S12では、隣接車線走行中の左右前方車両が自車線へ車線変更する可能性(車線変更度PL,PR)を演算する。S13では、左右前方車両と自車との間における時間的車間距離(自車が前方車両に到達するのにまでの時間)TYL,TYRを演算する。S14では、左右前方車両の車線変更度PL,PR、および、左右前方車両との間の時間的車間距離TYL,TYRから、左前方車両を考慮した場合の加速度上限値ALと、右前方車両を考慮した場合の加速度上限値ARとを求め、両者うちの小さい方を最終的な加速度上限値Aとする。S15でABが加速度上限値Aを超えていると判定する時、S16でABをAに制限するが、超えていなければ、この制限を行わない。S17では、ABを自車が発生するようアクセルペダルやブレーキ装置を駆動する。
(もっと読む)
車両用入力装置
【課題】 運転者の意図する操作内容とは異なる操作が行われても、運転者に違和感を与えることがない車両用入力装置を提供する。
【解決手段】 ステアリングホイール101の操舵の有無を舵角センサ19で検出し、舵角センサ19で検出されたステアリングホイール101の操舵角Sが所定の角度範囲の場合に、先行車追従制御システムに関する操作スイッチであるコントロールスイッチ16の操作を無効とするように構成した。これにより、ステアリングホイール101の回動位相に起因するコントロールスイッチ16の誤操作があっても、先行車追従制御システムの動作には影響がないので、運転者の意図しない内容の先行車追従制御により運転者が違和感を覚えることがない。
(もっと読む)
車両の走行制御装置
【課題】車速制御と車線逸脱防止制御との協調を図る。
【解決手段】車線逸脱防止制御において、推定横変位Xsが制動制御判定用しきい値XL2以上の場合(車線逸脱傾向がある場合)、ACCによる加速制御(車速制御)よりも車線逸脱防止制御を優先して作動させる(ステップS32〜ステップS35)。一方、
所定値XL3以上の場合(XL1>|Xs|≧XL3)、すなわち車線逸脱傾向ありと判定される直前では、ACCによる加速制御を抑制する(ステップS36、ステップS37)。
(もっと読む)
車両のクルーズ走行制御装置
【課題】 ドライバに対しクルーズ設定車速を制限車速以下の安全な車速まで減速することを促すことができる車両のクルーズ走行制御装置を提供すること。
【解決手段】 走行中にスイッチ操作を行うと、スイッチ操作時の車速をクルーズ設定車速とし、原則的にクルーズ設定車速を維持する走行制御を行うクルーズ走行制御手段を備えた車両のクルーズ走行制御装置において、自車が走行する道路の制限車速情報を収集する制限車速情報収集手段を設け、前記クルーズ走行制御手段は、前記クルーズ設定車速が前記制限車速を超過している場合、速度超過情報をドライバに伝達する手段とした。
(もっと読む)
車両用走行制御装置および送信波の照射制御方法
【課題】 先行車両との車間距離を正しく検出できる車両用走行制御装置および送信波の照射制御方法を提供する。
【解決手段】 路面からの反射光を先行車両とは誤認識しないように、路面からの反射光の影響を無視できる、路面からある一定の距離だけ離れた高さ位置をレーザ光下限高さとして設定する。先行車両200のリフレクタ201がレーザ光下限高さよりも低い位置にある場合には、先行車両200の後端部におけるレーザ光下限高さが基準照射方向となるように、コントローラ16が基準照射仰俯角を演算して車間距離センサ11に信号を出力する。車間距離センサ11は、コントローラ16からの信号に基づいて基準照射仰俯角を設定して、レーザ光により走査する。なお、先行車両200のリフレクタ201がレーザ光下限高さよりも高い位置にある場合には、レーザ光の基準照射方向は、先行車両200のリフレクタ201が存在する方向に設定される。
(もっと読む)
クルーズ制御装置
【課題】クルーズ制御に際し、実際の車速を目標速度により適切に追従させることのできるクルーズ制御装置を提供する。
【解決手段】ステップS14では、車両の加速度aに基づき、車両の走行方向に働く力を算出する。続くステップ16では、車速と目標速度との差と、車両に働く力とに基づき、車両を目標速度に保つために必要な駆動力を算出する。ステップS22では、算出される駆動力を、エンジンの出力と、ABSの制動力とに振り分け、ステップS24、S26では、振り分けられた出力や制動力を得られるような設定がなされる。
(もっと読む)
制動操作矯正装置
【課題】後続の車両の追突可能性や同乗者の不安を低減するために、運転者の制動操作の癖を矯正する。
【解決手段】運転者の制動操作を検知する制動操作検知手段1、2と、制動操作検知手段1、2で検知された制動操作を予め設定された制動操作モデルと比較してその制動操作モデルに対する乖離度合いを判定する乖離度合判定手段と、その乖離度合判定手段で判定された乖離度合いを記憶する乖離度合記憶手段と、その乖離度合記憶手段に記憶された乖離度合いの履歴に基づいて運転者の制動操作が適切か否かを判定する制動操作判定手段と、その制動操作判定手段で運転者の制動操作が適切でなく癖があると判定されたときに運転者に制動支援を行なう制動支援手段6とを設け、その制動支援により運転者の制動操作の癖を矯正する。
(もっと読む)
走行支援装置
【課題】 運転者によるブレーキの緩め始めの早いタイミングで警報出力を行うことによって安全性を高めるとともに、不必要な警報出力を抑制することにより運転者に不快感や違和感を与えることがない走行支援装置を提供する。
【解決手段】 自車両の周囲の障害物を検出する障害物検出手段10と、自車両が進行方向に進行することに対する危険性を判定する危険性判定手段5と、ブレーキ踏力の状態を検出するブレーキ踏力検出手段23と、警報判定手段6とを備え、この警報判定手段6は、危険性判定手段5により危険性ありと判定され、かつブレーキ踏力検出手段23によりブレーキ踏力が緩み側に所定量変化したことを検出した際に、警報出力を行うと判定する。
(もっと読む)
車両用走行制御装置
【課題】 車両制御中にドライバーの加速意思が検出されたときに、先行車の走行状態に応じて的確な車両制御を行う。
【解決手段】 設定車間距離での追従走行制御および設定車速での定速走行制御を行う車両制御装置において、加速意思検出手段M5によりドライバーの加速意思が検出されている間に、先行車走行状態検出手段m1により検出された先行車の速度変化量が所定値以下であると、追従走行制御の設定車間距離を自車の加速終了時の車間距離に合わせて減少させるので、ドライバーによる加速を先行車との速度を合わせるためのものではなく、追従走行制御の設定車間距離を減少させるためのものであると認識し、特別のスイッチ操作を必要とすることなく設定車間距離をドライバーの意思に応じて変更することができる。
(もっと読む)
先行車追従制御装置
【課題】先行車追従制御が行われており、かつ、車両の停止保持制御が行われている状態で、先行車追従制御を終了する操作が行われても、車両の停止保持を継続する。
【解決手段】先行車追従制御が行われている時に、車両が停止すると、EPKB11によって車両の停止保持制御を行う。この状態で、先行車追従制御を終了する操作がドライバによって行われると、EPKB11による車両の停止保持を継続した状態で、先行車追従制御だけを終了する。
(もっと読む)
車載情報端末、自動車の走行制御システム、自動車の走行制御装置及び方法
【課題】走行経路に応じて設定された目標速度に応じて自車の速度を制御するためには、走行経路の判定精度を向上させる必要がある。
【解決手段】地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の操舵角に応じて自車の走行車線を認識し、検出または推定された自車位置と認識された走行車線に応じて走行経路を判定する。例えば、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識し、検出または推定された自車位置と認識された道路勾配に応じて走行経路を判定する。あるいは、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識し、検出または推定された自車位置と認識された料金収受装置の種類に応じて走行経路を判定する。判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御する。
(もっと読む)
ハイドロプレーニング状態判定装置
【課題】
湿潤路を走行中に車輪と路面との接触が断たれ、ハイドロプレーニングが発生したことを正確に判定する。
【解決手段】
送信波を送信する送信機能と、前記送信機能で送信した送信波の反射波を受信する受信機能と、前記送信機能から送信する送信波を車輪の後ろの路面に送信し、送信波の路面からの反射波を前記受信機能で受信して、ハイドロプレーニングの発生状態を判定するハイドロプレーニング状態判定機能とを備えたことを特徴とするハイドロプレーニング状態判定装置。
(もっと読む)
車両用走行制御装置
【課題】 先行車両を追従制御するにあたり、ドライバに与える不安感を小さくするとともに、大きな減速を回避することができる車両用走行制御装置を提供する。
【解決手段】 定常走行状態目標加速度演算部21は、先行車両との車間距離Lおよび制御ゲインK1,K2等を用いて定常状態目標加速度at1を算出する。減速タイミング判断用目標加速度演算部22は、等加速度で減速した場合の仮減速タイミング判断用目標加速度at2_tmpで算出された目標加速度を算出しする。この値が所定のしきい値を未満である場合には、この値を減速タイミング判断用目標加速度at2として採用し、この値以上である場合には、予め記憶された減速タイミング判断用目標加速度最大値at2_MAXを採用する。選択部23は、定常状態目標加速度at1と減速タイミング判断用目標加速度at2の小さい方を追従用目標加速度として選択する。
(もっと読む)
追従停止制御装置及び追従停止制御方法
【課題】先行車の停止検出に基いて自車を減速停止する際に、減速度の増減変化を極力抑制し、ドライバ等に違和感を与えないようにして乗り心地を向上し、しかも、減速度の無駄な変化が極力発生しないようにする。
【解決手段】停止距離演算手段により自車1の現在の減速度に基く予想停止位置の前記先行車からの距離を予想停止車間距離としてくり返し算出し、判別手段により予想停止車間距離が先行車に近い所定の近限界停止車間距離から所定の遠限界停止車間距離までの許容範囲内か否かをくり返し判別し、前記許容範囲内の判別により自車1を現在の減速度に維持して減速し、前記許容範囲外の判別により予想停止車間距離が前記許容範囲内に入る新たな減速度を算出して自車1を前記新たな減速度で減速し、減速度の増減変化を極力抑制して自車1を追従停止制御する。
(もっと読む)
車両用走行制御装置
【課題】 特定走行状態時には確実に車両を走行させる一方で、定常走行状態時に乗員に対する乗り心地の低下を防止しながら、車両の加減速によってドライバに違和感を覚えさせることを防止する車両用走行制御装置を提供する。
【解決手段】 定常走行状態目標加速度演算部22は、先行車両と自車両との相対距離、定常状態目標車間距離、相対速度、および所定の第一制御ゲインK11,K21に基づいて定常状態目標加速度を算出する。特定走行状態目標加速度演算部23は、先行車両と自車両との相対距離、定常状態目標車間距離より小さい特定状態目標車間距離、相対速度、および第一制御ゲインK11,K21よりも大きい第二制御ゲインK21、K22に基づいて特定状態目標加速度を算出する。選択部24は、定常状態目標加速度および特定状態目標加速度のうちの小さい方を追従用目標加速度として選択する。
(もっと読む)
41 - 60 / 155
[ Back to top ]