
Fターム[3D046BB22]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 車両安定性 (1,438) | 路面状況対応 (248)
Fターム[3D046BB22]の下位に属するFターム
Fターム[3D046BB22]に分類される特許
1 - 20 / 25
アンチロックブレーキ制御装置
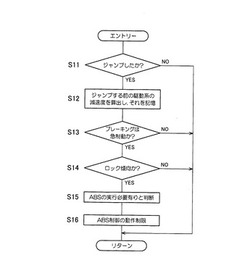
【課題】ブレーキ7(FL,FR,RL,RR)の作動中に車輪6(FL,FR,RL,RR)がロック傾向になったときに制動力を減少させるアンチロックブレーキ制御を実行する装置20において、ブレーキング中に車輪6がジャンプしてから着地するときに、駆動系にかかる負荷を軽減可能とする。
【解決手段】ブレーキング中において車輪6が走行路面からジャンプすることによって、アンチロックブレーキ制御の実行条件が成立したときに、当該アンチロックブレーキ制御における制動力減少動作を抑制させる。これにより、ジャンプしていた車輪6が着地したときの制動力が従来例のように減少されずに済むので、着地時に車輪6に作用する負荷が車輪6およびブレーキ7で吸収されることになって、駆動系にかかる負荷が軽減される。
(もっと読む)
車両用走行装置

【課題】車両の最適な走行経路を設定すること。
【解決手段】車両用走行装置10は、車両に搭載され、車両が進行する路面状態を検出する路面状態検出手段1、2と、目標とする目標位置までの走行経路を設定する経路設定手段3と、車両の特性を記憶する車両特性記憶手段4と、を備えている。経路設定手段3は、路面状態検出手段1、2により検出された路面状態と、車両特性記憶手段4により記憶された車両の特性と、に基づいて、走行経路S1、S2を設定する。
(もっと読む)
路面状態推定装置及び方法
【課題】精度よく路面の状態を推定することができる路面状態推定装置及び方法を提供する。
【解決手段】路面状態推定装置は、路面に接触する回転体の各種物理量を計測する計測段11と、計測段11で計測したデータから回転体の回転に同期した信号を抽出する適応デジタルフィルタを有し、計測段11で計測したデータと適応デジタルフィルタで抽出した回転に同期した信号とから、抽出した残りの信号を求める抽出段21と、抽出段21で抽出した残りの信号により路面の状態を推定する推定段41とを具える。
(もっと読む)
編成列車のブレーキ制御方法
【課題】先頭車両に続く車両の車輪の摩耗を低減させる。
【解決手段】複数の車両1〜4を連結した編成列車5でブレーキ指令信号により指令されたブレーキ力を各車両1〜4の重量に対応した応荷重信号に基づいて車両1〜4毎に負担するブレーキ力を演算する編成列車のブレーキ制御方法において、雨天時を意味する雨天信号が入力された場合に先頭車両1の応荷重信号を0より大きく1より小さい所定の軽減係数を乗じた値として各車両1〜4毎に負担するブレーキ力を演算するようにしたものである。
(もっと読む)
車両制御装置及び方法
【課題】運転のし易い車両特性が得られるようにした車両制御装置を提供する。
【解決手段】運転者の前方注視点位置を推定あるいは検出し(100)、推定あるいは検出された前方注視点位置に基づいて、前方注視点位置までの距離が長くなるにしたがって、運転者のハンドル操作量に対するヨーレートの応答を表わす伝達関数に含まれる時定数が長くなるように車両特性を設定し(102)、設定された車両特性が得られるように車両を制御する(104、106)。
(もっと読む)
ブレーキ制御装置
【課題】制動時のタイヤの摩耗に伴う停止距離の変化を抑制できるブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置は、タイヤの摩耗情報をたわみ検出センサを介して取得する。ABS閾値変更部42は取得したタイヤの摩耗情報に基づき、アンチロックブレーキ制御のABS制御タイミング閾値を変更し、ABS制御部44は、実際の制動時に、ABS制御タイミング閾値Nに基づきABSの制御を実行する。その結果、ABS制御タイミング閾値がタイヤの摩耗状態に応じて最適化され、制動時のタイヤの摩耗に伴う停止距離の変化を抑制できる。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】走行中の車両にアンチロックブレーキ制御が実行された場合に、車両が走行する路面状態によらず、車両における制動力の低下を抑制すると共に、車両における走行の安定性を確保することができる車両制動制御装置及び車両の制動制御方法を提供する。
【解決手段】CPUは、左右の車輪のうち何れか一方の車輪に対してのみアンチロックブレーキ制御が実行されている場合、車両が左右異μ路を走行していると判定する。そして、CPUは、車両安定性制御の実行を禁止する。一方、CPUは、左右の車輪にそれぞれアンチロックブレーキ制御が実行されている場合、及び左右の車輪の何れに対してもアンチロックブレーキ制御が実行されていない場合、車両安定性制御の実行を許可する。
(もっと読む)
車両の制動制御装置
【課題】砂利道など、摩擦による制動力のほか、楔効果による抵抗力を発生する路面での制動時に、この抵抗力を有効利用した制動力のフィードバック制御を実現する。
【解決手段】砂利道での制動時は、摩擦による制動力に加えて、車輪および路面間に楔状に介在した砂利を噛み込む楔効果による制動力が発生する。演算部34では楔効果による加算減速度Geを演算し、これを目標減速度tGに足し込んで目標減速度補正値tGcを求める。演算部35ではtGcを実現するフィードフォワード制御用目標制動トルクTbffを求め、演算部36では、目標減速度補正値tGcと減速度検出値Gとの偏差ΔG=tGc-Gをなくす(tGc=Gにする)制動トルクフィードバック補償量ΔTbfbを求める。これらTbffおよびΔTbfbを加算して得られた最終的な目標総制動トルクtTbを配分部37で各輪の制動力に配分する。
(もっと読む)
車輪スリップ抑制制御装置
【課題】 車両発進時に優れた加速性を実現することができる車輪スリップ抑制制御装置を提供すること。
【解決手段】 路面状態を推定し、推定した路面状態に応じて、駆動輪の回転速度に関連する制御目標値を、少なくとも2以上の異なる決定態様で決定し、決定した制御目標値に向けて駆動輪の回転速度を制御して車輪スリップ抑制制御を行なう車輪スリップ抑制制御装置において、車両発進時には、第1の決定態様よりも大きい制御目標値を決定する第2の決定態様によって、前記制御目標値が決定されることを特徴とする。
(もっと読む)
自動二輪車両におけるABS制御装置
【課題】 ABS制御開始時にドライバに与える違和感を低減できるABS制御装置を提供する。
【解決手段】 ドライバがABS制御を開始させ易くしたいか開始させ難くしたいかという要望を、ドライバのブレーキ操作やABS制御が既に開始されている車輪があるか否かに基づいて判別し、その結果に応じてABS制御の開始しきい値を変更する。これにより、ドライバがABS制御が開始されるであろうと期待するような状況下でABS制御が開始されなかったり、ABS制御の開始しきい値が低く設定され過ぎて、ドライバが期待していないのにもかかわらずABS制御が開始されてしまうようなことが発生することを防ぐことが可能となる。これにより、ドライバに違和感を与えないようにでき、ドライバのブレーキフィーリングの向上を図ることが可能となる。
(もっと読む)
車両用速度制御装置
【課題】 車両の特性に応じた最高速度を設定する。
【解決手段】 車両の現在地を検出して道路地図情報から車両が現在走行中の道路区間とその道路区間の制限速度を検索するとともに、車両の特性を設定し、車両特性に応じて制限速度を低減し、低減した制限速度より低い速度となるように車両の走行速度を制御する。
(もっと読む)
車両制御装置
【課題】 車両の制動力および駆動力の少なくとも何れかを制御してアンダーステア状態やオーバーステア状態を抑制する車両制御装置において、道路形状を考慮した的確な制御が行えるようにする。
【解決手段】 車両の実際の運動状態と基準となる運動状態とを比較した結果に基づいて車両の挙動を制御するための操作量を算出し、この操作量に基いて車両の制動力および駆動力の少なくとも何れかを制御するものにおいて、車両の進行方向の道路形状を検知し、その道路形状に基づいて前記操作量を補正するので、実際の道路形状に則した制御を行ってアンダーステア状態やオーバーステアを的確に抑制することができる。特に、車両の実際の運動状態に基いて予測した車両の進行方向と、検知した道路形状とを比較した結果に基づいて前記操作量を補正するので、車両の進行方向が道路の方向に対して逸脱している程度に応じて前記操作量を的確に補正することができる。
(もっと読む)
車両走行状態判別装置および車両走行状態判別方法
【課題】 砂地走行状態と牽引走行状態とを精度よく判別することができる車両走行状態判別装置および車両走行状態判別方法の提供。
【解決手段】 車両1は、車輪FR〜RLのスリップ率に基づいて制動力を付与するためのブレーキ圧を増減させるECU100を備え、ECU100は、車両1の走行路が砂地路であるか否かを判定する走行路判定部105を備える。走行路判定部105は、車両1が砂地路を走行している状態にあると判断した後、車両1の減速中あるいは高速走行中に、車両1が砂地走行状態にあるか、または牽引走行状態にあるかを再判定する。
(もっと読む)
アンチスキッド制御装置、アンチスキッド制御方法、車両走行路判別装置および車両走行路判別方法
【課題】 車両の走行路が砂地路であるか否かを精度よく判定し、走行路が砂地路であると誤判定されて不適切なアンチスキッド制御が実行されてしまうことを抑制する。
【解決手段】 車両1は、車輪FR〜RLのスリップ率に基づいて制動力を付与するためのブレーキ圧を増減させるECU100を備え、ECU100は、車両1の走行路が砂地路であるか否かを判定する走行路判定部105と、車両1の走行路が砂地路であると判断された場合に、砂地用のABS制御を行うブレーキ圧設定部102とを備える。走行路判定部105は、ブレーキ圧設定部102による砂地路に応じたブレーキ圧の増減処理が開始された後に、車両1の制動状態に基づいて走行路が砂地路であるか否かを再判定し、ブレーキ圧設定部102は、車両1の走行路が砂地路ではないと判断された場合、砂地用のABS制御を解除する。
(もっと読む)
車両走行制御装置および車両走行制御方法
【課題】 自車の前方の進路を減速して走行する必要がある場合、走行速度を適切に減速して走行させる車両走行制御装置および車両走行制御方法を提供する。
【解決手段】 自車の位置を検出する位置検出手段と、前記位置検出手段で検出された前記自車の位置に基づき前記自車の前方の進路上に前記自車の減速走行を必要とする減速要因があるか否かを判定する減速判定手段と、前記減速要因に基づき前記進路上の走行地点における前記自車の推奨速度を取得する推奨速度取得手段と、走行中の前記自車の実速度を取得する実速度取得手段と、前記走行地点における前記実速度と前記推奨速度との大小を比較する速度判定手段と、前記進路上に前記減速要因があり、前記走行地点における前記実速度が前記推奨速度よりも速い場合、ブレーキの操作量に対応して発生するブレーキ力の大きさが増加するようにブレーキ力を制御するブレーキ力制御手段と、を備える。
(もっと読む)
車両制御装置,車両制御システム及び車両制御方法
【課題】 未だ走行したことのない道路であっても、運転者の嗜好に合った安全な車両制御を実現する。
【解決手段】 本発明の車両制御装置によれば、これから走行しようとする道路の道路情報が、既に学習されて制御用データベースに記憶されている場合には(S3:YES)、その道路情報に対応した車両制御情報に基づいて変速制御等の車両制御が行われる(S4)。一方、これから走行しようとする道路の道路情報が未学習であり、制御用データベースに記憶されていない場合には(S3:NO)、制御用データベースからその道路情報に類似した道路情報を抽出し、それに対応した車両制御情報に基づいて車両制御が行われる(S7)。
(もっと読む)
車両用ブレーキ制御装置
【課題】 運転者の加速意思や減速意思を踏まえて車両の挙動制御を行うことができ、ドライブフィーリングを向上させる。
【解決手段】 車両の挙動を安定化させる挙動制御を実行する挙動安定化制御手段56と、運転者による操作入力に基づいて運転者の加速意思および減速意思の各々の有無を判定する加減速意思判定手段54とを備え、加減速意思判定手段54の判定に応じて、閾値Sを変更する閾値変更手段57が、加減速意思判定手段54により加速意思が有ると判定された場合に、閾値Sをこれよりも高い高閾値に変更する制御と、減速意思が有ると判定された場合に、閾値Sをこれよりも低い低閾値に変更する制御のうち少なくとも一方を実行し、前記挙動安定化制御手段は、前記閾値変更手段によって変更された閾値に基づいて挙動制御する構成とした。
(もっと読む)
車両運動制御装置
【課題】 走行している路面の状況を誤ることなく判定し、判定された路面状況に応じた適切な車両運動制御を実行することが可能な車両運動制御装置を提供する。
【解決手段】 車両運動制御装置は、車両Vの各車輪1に作用する駆動力及び/又は制動力を調節することにより車両運動を制御する車両運動制御ECU9と、各車輪1の空気圧を検出する空気圧センサ18とを備える。車両運動制御ECU9は、推定車輪加速度と実車輪加速度との乖離度から路面の走行抵抗を検出するとともに、空気圧センサ18の検出結果に基づいて各車輪1の空気圧が低下しているか否かを判定する。そして、車両運動制御ECU9は、検出された走行抵抗が第1所定値以上であり、かつ、車輪1の空気圧が低下していないと判定された場合には、車両運動制御の介入を遅らせるように制御特性を変更する。
(もっと読む)
車線逸脱防止装置
【課題】車線逸脱回避に必要なヨーモーメントを確実に発生させる。
【解決手段】車線逸脱防止装置は、選択フラグFLSDが1の場合、左右の駆動輪の駆動力差により目標ヨーモーメントを車両に付与して逸脱回避をし(ステップS14〜ステップS16)、選択フラグFLSDが2の場合、左右の駆動輪の駆動力差及び予め選択した制動輪(ステップS8)に制動力を与えて、左右輪の制動力差により目標ヨーモーメントを車両に付与して逸脱回避をし(ステップS17〜ステップS19)、選択フラグFLSDが0の場合、左右輪の制動力差により目標ヨーモーメントを車両に付与して逸脱回避をする(ステップS20及びステップS21)。
(もっと読む)
分離されたブレーキが装備された自動車の停止及び走行過程におけるブレーキ制御装置及び制御方法
本装置は、自動車の車輪に加えられる駆動力を測定する少なくとも1つのセンサ(16a)と、自動車の環境の傾斜センサ(15)と、運転者の制動の要求を測定する1または複数のセンサ(16)と、電子制御ユニット(1)と、自動車の環境の傾斜が如何なるものであっても自動車を停止状態に維持するためのブレーキ指令値を計算する手段(32)と、運転者によって希望される坂道における発進の際のブレーキ指令値を計算する手段と、運転者によって希望される下り坂における発進の際のブレーキ指令値を計算する手段(34)と、坂道における走行時に、駆動用のエンジンが変速機から偶発的に切り離されているときに、自動車の加速度を制限するブレーキ指令値を計算する手段(35)を有する。電子制御ユニット(1)は、各ブレーキ指令値を計算する手段を逐次またはその他のものと独立に起動することができる。  (もっと読む)
(もっと読む)
1 - 20 / 25
[ Back to top ]