
Fターム[3D046BB23]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 車両安定性 (1,438) | 路面状況対応 (248) | 摩擦係数 (138)
Fターム[3D046BB23]の下位に属するFターム
Fターム[3D046BB23]に分類される特許
1 - 20 / 62
車両用トラクション制御装置
【課題】左右の駆動輪のスリップが交互に大きくなるスリップのハンチングを防止することが可能な車両用トラクション制御装置を提供する。
【解決手段】ディファレンシャル15を介して駆動力が伝達される左右の後輪12L、12Rを有する車両10に適用され、スキッドコントロールコンピュータ30が左右の後輪12L、12Rのうち加速スリップが大きい後輪に対して制動力を付加するトラクション制御装置において、スキッドコントロールコンピュータ30は、左右の後輪12L、12Rの両方がスリップしている場合、加速スリップが大きい後輪に対して付加する制動力を制限する。
(もっと読む)
四輪駆動車の制御装置

【課題】四輪駆動を維持したまま、四輪駆動車の副駆動輪への駆動力伝達系の自励振動の発生防止又は抑制を図ることができる四輪駆動車の制御装置の提供。
【解決手段】エンジンの駆動力を車輪に伝達する駆動力伝達系の自励振動を制御する四輪駆動車の制御装置であって、自励振動の発生又は発生の予兆を検知する自励振動検知手段1と、自励振動検知手段1によって自励振動の発生又は発生の予兆が検知された場合に、ブレーキペダル操作と独立に、四輪駆動車の主駆動輪及び/又は副駆動輪に所定の制動力を作用させる制動力制御手段2とを備える。
(もっと読む)
摩擦状態推定装置、自動車および摩擦状態推定方法
【課題】車輪と路面との間における摩擦状態をより正確に推定すること。
【解決手段】摩擦状態推定手段が、ブレーキパッドに印加される圧力と車輪の回転状態との関係、あるいは、ナックルとブレーキキャリパとの締結部に生じる歪みの少なくとも何れかを示す物理量に基づいて、車輪の摩擦状態(安定/不安定)を判定する。したがって、車輪と路面との間における摩擦状態をより正確に推定することができる。
(もっと読む)
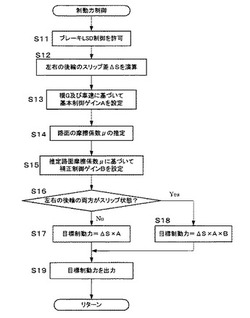
制動制御システム
【課題】ブレーキペダルが操作されたときに、路面状態に応じた最適な制動制御を迅速に実施すること。
【解決手段】ブレーキペダルが操作されたときに複数の車輪14の各々に与える制動力を車輪14毎に独立して制御する制動制御システム200において、路面状態推定部は、車輪14と路面との間の摩擦係数を算出する。制動制御部104は、右輪と路面との間の摩擦係数である右側摩擦係数と左輪と路面との間の摩擦係数である左側摩擦係数との差に基づいて、制動距離短縮制御および車両姿勢安定化制御のどちらかを、ブレーキペダルが操作されたときに実施するものとして、ブレーキペダルが操作されていないときに予め設定する。ブレーキペダルが操作されたときに、制動距離短縮制御および車両姿勢安定化制御のうち予め設定されているものを実施する。
(もっと読む)
路面状態の推定方法、路面状態の推定装置、タイヤ、及び車輌制御装置
【課題】簡単な構成で車輌が走行している路面の状態を精度よく推定することができるとともに、路面変化に対する追従性の高い路面状態の推定方法とその装置、及び、路面状態の推定に用いられるタイヤを提供する。
【解決手段】歪ゲージ11をタイヤの赤道部近傍のブロック内部の、タイヤ周方向に直交する面内に、その検出方向がほぼ当該ブロックのタイヤ径方向になるように埋設するとともに、上記歪ゲージ11の検出出力から圧縮歪の時間変化の波形を抽出し、この圧縮歪波形のタイヤ接地面内におけるピークのピーク減少量Bを求め、ピーク減少量Bの大きさに基づいてタイヤの走行する路面状態を推定するようにした。
(もっと読む)
車両の制動制御装置
【課題】センターデフロック状態又は直結4輪駆動状態であっても、制動制御を行い、運転者の運転を適切に支援できる制動制御装置を提供することを目的とする。
【解決手段】本発明は、車輪への制動力を制御して、車両の旋回中の挙動を安定させる車両の制動制御装置80であって、
前記車両の旋回状態を検出する旋回状態検出手段10と、
該旋回状態検出手段により検出された旋回状態に基づいて、前記車両の各車輪の制動制御量を設定する制動制御量設定手段20と、
該制動制御量設定手段により設定された制動制御量に基づいて、前記各車輪の制動制御を行う制動制御手段50と、
前記車両が走行している路面の路面摩擦係数を推定する路面摩擦係数推定手段30とを備え、
前記制動制御量設定手段は、前記車両がセンターデフロック状態又は直結4輪駆動状態のときには、前記各車輪の制動制御量の上限を、前記路面摩擦係数推定手段により推定された路面摩擦係数に応じて変更することを特徴とする。
(もっと読む)
制動装置の制動利得特性が可変に制御される車輌
【課題】摩擦係数が低い低μ路に於いて制動時の車輪スリップを抑制しつつ許容される時間内に十分な減速効果を上げることができるようにする一方、摩擦係数が高い高μ路に於いては軽い制動操作で快適な制動が達成されるようにする。
【解決手段】路面の摩擦係数の大小を判別し、低μ路に於いてはブレーキペダルの踏量に対する制動力の増大率を表す制動利得を踏量が小さいとき小さくし、踏量が大きいとき大きくし、また高μ路に於いては踏量が小さいとき大きくし、踏量が大きいとき小さくする。
(もっと読む)
路面摩擦状態推定方法、路面摩擦状態推定装置、及び、路面摩擦状態推定用タイヤ
【課題】タイヤと路面との間の摩擦状態を精度良く推定する方法とその装置、及び、路面摩擦状態の推定に用いられる路面摩擦状態推定用タイヤを提供する。
【解決手段】タイヤトレッドの幅方向中心に位置する陸部内に埋設した垂直応力検出手段11a及び剪断応力検出手段11bとにより、上記陸部のトレッドゴムに作用する垂直応力σzとタイヤ周方向の剪断応力τxとを検出した後、応力比算出手段12にて応力比rx=(τx/σz)を算出し、この応力比rxと上記垂直応力σzのデータとを車体側の路面摩擦状態推定装置20に送信し、接地中心位置から路面蹴出し点の間の領域の最大値rbを抽出し、上記抽出された最大値rbと上記記憶手段24に記憶されたr−μマップ24Mとに基づいて、路面とタイヤとの間の路面摩擦係数μを推定するようにした。
(もっと読む)
車両運動制御装置
【課題】車両に対する障害物を事前に判断し、様々な走行情報を加味して回避走行全般に亘り、ドライバの操作、意志を的確に反映して自然に各車両挙動の制御装置が適切に動作し、障害物の回避走行を適切に行う。
【解決手段】路面摩擦係数、路面勾配の路面情報、自車両と障害物の相対的な運動を考慮し自車両が制動操作のみで障害物を回避できるか判定し、自車両の障害物に対する回避操作の状態を判定する。そして、自車両の制動操作のみで障害物を回避できない場合で且つ自車両の障害物に対する回避操作が行われている際、ハンドル操作と車両挙動に応じ回避走行モードに移行する。回避走行モード中はハンドル操作と車両挙動の変化に応じ必要な制御を車両挙動制御部に実行させ、回避走行モードの解除はドライバのハンドル操作による回避走行終了を検出し、或いは、障害物回避後の車両挙動の安定を検出し行う。
(もっと読む)
タイヤの摩擦状態判定装置、自動車及びタイヤの摩擦状態判定方法
【課題】タイヤの摩擦状態の誤判定を抑制する。
【解決手段】車両は、制動力fxが減少し、かつ車輪速ωが増加する条件を満たしている限り、判定許可フラグflg_xを初期設定値である1に維持するとともに、カウンタ値countをインクリメントしていき(ステップS11〜ステップS13)、該条件を満たさなくなったときに、カウンタ値countをデクリメントしていくとともに、判定許可フラグflg_xを0に変更する(ステップS12、ステップS14、ステップS15)。そして、車両は、判定許可フラグflg_xが0である期間中、タイヤの摩擦状態が不安定であるとする判定をすることを禁止する。
(もっと読む)
タイヤの摩擦状態判定装置、自動車及びタイヤの摩擦状態判定方法
【課題】タイヤの摩擦状態の判定精度を高くする。
【解決手段】車両は、高摩擦状態から低摩擦状態に遷移したことを検出した場合(ステップS12)、該遷移の検出時点以後の摩擦状態の変化に対し、局所変動を含む摩擦状態の変化に対応する判定基準を用いて(ステップS13〜ステップS17)、タイヤの摩擦状態が不安定であると判定する(ステップS18)。
(もっと読む)
車両制御装置
【課題】カーブを走行する際、通過可能な車速となるように自車を減速させることができる車両制御装置を提供する。
【解決手段】カーブ道路を走行する際、そのカーブ道路に対して設定した目標速度Vs0_tまで自車を加減速するための目標加減速度dVs0/dtを算出し、自車の現在の速度Vs0と目標速度Vs0_tとを比較した結果に基づいて、自車に発生する加減速度が目標加減速度dVs0/dtとなるように加減速制御を行う。
(もっと読む)
車両運動制御装置及び制御方法
【課題】車両統合制御において常にμ利用率の上限を最小にする。
【解決手段】各輪タイヤの最大発生力を表す各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力と各輪のμ利用率の上限値に対する割合を表す各輪利用率とを演算し、演算された各輪タイヤ発生力に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御する。
(もっと読む)
車両運動制御装置
【課題】路面摩擦係数などの車輪路面状態の変化に対応して運転者の運転操作を支援する車両運動制御の介入タイミングを適正化する。
【解決手段】トルク検出手段22により検出されたセルフアライニングトルクと車両運動状態推定手段13により推定された推定運動状態量とから、予め設定されたタイヤモデルに基づいて車輪路面状態である路面摩擦係数を推定する車輪路面状態推定手段23を設け、推定された路面摩擦係数に応じて車両運動状態推定手段13の車両運動モデルに係るパラメータであるタイヤのコーナリングパワーKf、Krを変更するパラメータ設定手段26と、路面摩擦係数に応じて制御介入判断手段16の介入閾値を変更する介入閾値設定手段27を設けたことから、車両運動状態が安定な間であっても路面摩擦係数を高精度で推定できる。しかも、路面摩擦係数に応じて車両運動モデルのパラメータを変更するとともに、車両運動の制御介入閾値を変更していることから適正な制御介入タイミングを実現できる。
(もっと読む)
車両用ブレーキ制御装置
【課題】高μ路から低μ路に急に切り替わってしまうような急変路において、高μ路で設定されていたモータ回転数から低μ路で最適なモータ回転数に早急に切替えられるようにすることで、的確なABS制御が実行できるようにする。
【解決手段】ABS制御時に、モータ出力調整部100iにて、モータ回転数演算部100hが設定したモータ回転数の変化量に応じて急変路であるか否かを検出し、急変路であることが検出されたときには、第1、第2モータ11、12に流す電流を第1、第2モータ11、12が停止する形態に制御する。これにより、高μ路に適したモータ回転数から低μ路に適したモータ回転数に急変させることが可能となり、急変路であってもABS制御中に必要な減速スピードを得ることができるため、的確なABS制御を実行することが可能となる。
(もっと読む)
車両の運動制御装置
【課題】演算負荷が少なく適切に安定化制御を行い得る車両の運動制御装置を提供する。
【解決手段】目標ヨーモーメント及び一つの車輪TRの動荷重に基づき当該車輪に対する媒介変数(θ)を演算し、この媒介変数及び当該車輪の動荷重に基づき当該車輪に対する目標液圧を演算すると共に、媒介変数及び車両状態量に基づき当該車輪に対する目標スリップ率を演算し、これら目標スリップ率及び目標液圧に基づき当該車輪に対する制動力を制御する。例えば、低摩擦係数路面では目標スリップ率に基づき当該車輪に対する制動力を制御し、高摩擦係数路面では目標液圧に基づき当該車輪に対する制動力を制御する。
(もっと読む)
ブレーキ制御装置
【課題】タイヤの性能の悪化に伴って発生する制動時のフィーリングの悪化や、タイヤの摩耗量の増加を従来よりも確実に緩和することが出来るブレーキ制御装置を提供すること。
【解決手段】本願に係る発明は、性能低下時にブレーキに発生する摩擦力の最大値を、通常性能時にブレーキに発生する摩擦力の最大値よりも小さくする。
(もっと読む)
車両の状態推定及び制御装置
【課題】 路面摩擦係数の影響がヨーレイトなどの車両挙動として現れる前に、車両状態を推定可能とする車両の状態推定及び制御装置を提供する。
【解決手段】 第1のタイヤ横力和演算手段と、タイヤすべり角検出手段と、輪荷重推定手段と、制駆動反力推定手段と、推定輪荷重と推定制駆動反力とタイヤすべり角と路面摩擦係数に基づき、路面摩擦係数を演算する第2のタイヤ横力和演算手段と、路面摩擦係数の探索範囲を設定する探索範囲設定手段と、探索範囲中であって第2のタイヤ横力特性演算手段にもとづき演算される第2のタイヤ横力和の中から、第1のタイヤ和横力演算手段に基づき演算される第1のタイヤ横力和との差が小さくなる条件をみたす、第2のタイヤ横力和を探索する探索手段と、第2のタイヤ横力和から推定路面摩擦係数を推定する推定路面摩擦係数推定手段とを備えることとした。
(もっと読む)
車両制動装置
【課題】 車両の製造コストの増大を抑えつつ、車両の制動力を向上した車両制動装置を得る。
【解決手段】 ホイールモータ14を支持する車体との間に、タイヤ16のキャンバ角θを変更する為のキャンバ角操作機構20が更に配置される。キャンバ角操作機構20は、車両12の4つのタイヤ16に対応してそれぞれ配置される。4つのタイヤ16のキャンバ角θを一斉に大きくするのに伴い車体が低下して、車体の下面が路面Rに近づくことになる。車両12の下部とされるホイールモータ14の下側部分には、ゴム製で下面が平面状に形成された平面状ブレーキ部材及び、金属製で下面が爪状に形成された爪状ブレーキ部材が配置される。車両12の状態を検出するための状況検出装置30が車両12に搭載される。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】路面の摩擦係数に関わらず動的制動時における車両の操縦安定性を確保する電動パーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキ10の制動力を変更する電動アクチュエータ20を制御する電動パーキングブレーキ制御装置40,60を、車両の走行状態に基づいて路面の推定摩擦係数を算出する摩擦係数推定部61と、パーキングブレーキ10が解除された状態において、推定摩擦係数に応じてパーキングブレーキ10の目標減速度を設定する目標減速度設定部41bと、パーキングブレーキ10の制動時に、目標減速度に応じて電動アクチュエータ20を制御する制御部41cとを備える構成とする。
(もっと読む)
1 - 20 / 62
[ Back to top ]