
Fターム[3D046HH19]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 乗員、乗降状態 (51)
Fターム[3D046HH19]に分類される特許
1 - 20 / 51
ブレーキアシスト装置
【課題】ブレーキ操作時に制動力が増大するようにブレーキ操作をアシストする、ブレーキアシスト装置に関し、簡素且つ安価な構成で個々のドライバに応じた閾値を設定できるようにする。
【解決手段】ドライバのブレーキ操作状態に基づいて制動力を増大させるブレーキアシスト装置において、ブレーキアシスト装置を作動させるか否かの作動閾値を設定又は変更する閾値設定手段7を備え、閾値設定手段7は、ドライバの体重又は姿勢に基づいて作動閾値を設定又は変更するように構成する。
(もっと読む)
車両用乗員保護装置

【課題】車両の衝突回避操作に際し、シートベルト未装着の乗員を確実に保護する車両用乗員保護装置を提供する。
【解決手段】乗員保護装置において、障害物との衝突可能性を予測する衝突発生予測手段と、上記衝突発生予測手段による衝突発生予測に応じて、衝突を回避するよう車両制御する衝突回避手段と、シートベルトを装着していない乗員を検知するベルト未装着乗員検知手段と、上記ベルト未装着乗員検知手段により検知されたベルト未装着の乗員に対し、該乗員に安全姿勢をとらせるよう誘発する安全姿勢誘発手段と、を設ける。上記ベルト未装着の乗員を検出したとき、上記安全姿勢誘発手段を作動させた後、所定条件の成立時に上記衝突回避手段を作動させる。
(もっと読む)
産業車両の走行制御装置
【課題】走行状態中に運転者が離席した場合であっても、走行安定性の低下を抑制しつつ、回生制動によって停止距離の低減を図ること。
【解決手段】走行状態中に運転者の離席を検出した場合は回生制動を掛け、その際には車両の状態に応じて回生制動の強さを変更するように制御する。この制御は、回生制動の強さに対し、荷重の条件と、揚高の条件と、ティルト角の条件を予め対応付けておく。具体的に言えば、揚高については低揚高よりも高揚高の方が回生制動の強さを弱くし、ティルト角については後傾側よりも水平・前傾側の方が回生制動の強さを弱くする。これにより、回生制動は、車両の状態に応じた強さで掛けられ、車両の走行安定性の低下が抑制される。また、回生制動により、車両の停止距離の低減が図られる。
(もっと読む)
ブレーキ制御システム
【課題】鉄道車両用のブレーキシステムで、各車輪の滑走に対してブレーキ力をきめ細かく制御できるようにする。
【解決手段】車軸単位にブレーキ制御器2a〜2dを配置する。ブレーキ制御器2a〜2dは、各車軸単位に、応荷重信号、ブレーキ指令、電気ブレーキ信号を基に演算された必要空気ブレーキ力で、各車軸の空気ブレーキの制御を行う。各ブレーキ制御器2a〜2dの間で各車軸の軸速度を送受信し、各ブレーキ制御器2a〜2dに対応する車軸の軸速度と、各車軸の軸速度で送受信した他の車軸の軸速度とを用いて、対応する車軸の滑走を検知し、対応する車軸の滑走、再粘着の制御を行う。車軸単位にブレーキ制御器が配置されているので、各車輪に滑走が発生した場合、ブレーキ力をきめ細かく制御できる。また、台車単位の応荷重により、各々独立して空気ブレーキ力を作用できる。
(もっと読む)
車両の運転支援装置
【課題】ドライバの走行する環境を精度良く検出し、自然で最適な警報や自動ブレーキ制御を行う。
【解決手段】制御ユニット8は、予めドライバの視線挙動に基づいて漫然状態と判定された際の入力画像を基準画像として設定する。そして、この基準画像と入力画像の正規化相関を演算し、この正規化相関の相関値から、ドライバの漫然状態を検出し、漫然状態と判定した場合には、警報の頻度を高め、衝突回避のための自動ブレーキ制御の開始タイミングを早めるように変更する。
(もっと読む)
車両の制御装置
【課題】車両周辺を撮像する撮像手段と、該撮像手段により撮像された画像データに対して所定の画像処理を行う画像処理手段とを備え、該画像処理手段における画像処理に基づいて作動する制御システムの作動制御を行う車両の制御装置において、画像処理手段の処理負担を増加させることなく、複数の制御システムの作動を効率よく制御する。
【解決手段】上記制御システムを低速時に作動する低速度領域性制御システムと高速時に作動する高速度領域制御システムとで構成するとともに、低速時(ステップSA1でNOのとき)には、低速度領域制御システムを作動させるとともに、上記画像処理手段による高速度領域制御システムのための画像処理を停止する一方、高速時(ステップSA1でYESの場合)には、高速度領域制御システムを作動させるとともに、上記画像処理手段による低速度領域制御システムのための画像処理を停止するようにする。
(もっと読む)
車両制御装置
【課題】アクセル操作とブレーキ操作を1つのペダルで兼用する車両制御装置において、従来よりも車速制御をしやすくすること。
【解決手段】ペダル40の踏み込み量によって車速を制御する速度制御部100を設ける。この速度制御部100は、ペダル40が速度制御踏み込み範囲内で踏み込まれたときは車速を減速させ、速度制御踏み込み範囲内でペダル40が戻されたときは車速を加速させる。また、ペダル40が速度制御踏み込み範囲よりも深い制動範囲まで踏み込まれたときは、その踏み込み量に応じた制動力で車両を制動させる。ペダル40の踏み込み量の大小によって車速を制御することができるので、速度制御がしやすくなる。しかも、速度制御踏み込み範囲を超えてさらに深い範囲まで十分に踏み込むことにより急ブレーキをかけることも可能となる。
(もっと読む)
運転支援装置
【課題】
信号に進入する車両に対する運転支援を行うにあたり、運転者にとって余計な運転支援とはならないようにする運転支援を行う運転支援装置を提供する。
【解決手段】警報判定ECU1は、警報しきい値設定部11、焦度判定部12、および警報判定部13を備える。警報判定設定部11は、各センサから出力された信号に基づいて運転者の信号停止操作を判定し、この信号停止操作に基づいて警報判定しきい値TDsおよび通過判定しきい値TDmを算出する。焦度12は、各センサから出力された信号に基づいて運転者の焦度を算出し、算出された焦度に基づいて信号到達時間補正値TDhを算出する。警報判定部13は、警報判定しきい値TDsおよび通過判定しきい値TDmを信号到達時間補正値TDhによって補正し、信号到達時間TDと比較することにより、警報判定を行う。
(もっと読む)
制動制御装置
【課題】後方衝突時における二次的事故の発生を防止しかつ自車両に加わる衝撃を軽減する制動制御装置を提供する。
【解決手段】車両の車輪に設けられたブレーキ装置10の制動力を制御する制動制御装置を、車両の衝突を検出する衝突検出手段41と、車両の前後方向における加速度を検出する加速度検出手段43とを備え、衝突検出手段41が衝突を検出した後、加速度検出手段43が検出した加速度が所定の閾値を下回った場合にブレーキ装置10に制動力を発生させる構成とする。
(もっと読む)
車両用走行支援装置
【課題】車両制動を迅速に行うこと。
【解決手段】車両用走行支援装置10は、運転者の状態を検出する運転者状態検出手段2aと、運転者状態検出手段2aにより検出された運転者の状態に基づいて、運転者の運転に対する集中度を推定する運転集中度推定手段2と、運転集中度推定手段2により推定された運転者の集中度が高い状態よりも、運転者の集中度が低い状態の方が、運転者の制動操作に対する車両の減速度の立ち上がりをより大きくするような制動準備を行う制動準備手段1と、を備えている。
(もっと読む)
乗員検出システム、警報システム、制動システム、車両
【課題】乗員検出システムにおいて、運転者の注意力が低下しているか否かを精度良く検出する。
【解決手段】乗員検出システム100は、3Dカメラ112と、3Dカメラ112によって撮影された三次元画像に基づき運転者の頭部及び手に関する情報を抽出する情報抽出処理部152と、情報抽出処理部152で抽出された情報に基づき運転者の頭部及び手の位置或いは動作が予め規定された規定状態にあるか否かを検出する検出処理部154と、検出処理部154における検出結果に基づき運転者の頭部及び手が規定状態を外れている場合は、当該部位が規定状態を外れている時間を積算する積算処理部156と、積算処理部156によって積算された積算時間に基づいて、当該積算時間が予め設定された設定値を上回る場合、運転者の注意力が低下していると判定し、当該積算時間が設定値以下の場合、運転者の注意力が低下していないと判定する判定処理部158を備える。
(もっと読む)
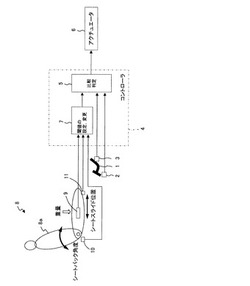
プリクラッシュシステム
【課題】本発明は、想定される衝撃に対して効果的に備えることができるプリクラッシュシステムを提供する。
【解決手段】プリクラッシュシステム10は、自動車20に衝撃が入力される可能性がある状況のとき運転者Hが行う耐ショック姿勢に起因して自動車に作用する荷重を検出する耐ショック姿勢検出用センサ11〜14と、耐ショック姿勢検出用センサ11〜14によって検出された検出値に基づいて運転者Hが耐ショック姿勢であるか否かの判断をするとともに、乗員が耐ショック姿勢であると判断すると自動車20に搭載された安全装置24,25を作動させるコントローラ15と、を備える。
(もっと読む)
車両制御装置および車両制御方法
【課題】運転者の心理状態(感情)を総合的に判断し、判断結果に基づいた車両制御を行なうこと。
【解決手段】自車両状態検知部12が自車両の状態を検知し、感情推定部16が自車両の状態から運転者の感情を推定する、もしくは自車両が特定の状態となった場合に、生体状態監視部13が取得した情報を用いた感情推定を起動することで、運転者の心理状態を総合的に判断し、制御内容決定部15による運転者への通知制御と、車両の挙動制御へ反映させることで、積極的に事故などを防止する。
(もっと読む)
運転特性判定装置、運転特性判定方法及び車両制御装置
【課題】運転環境や運転者の運転意図に影響を受けることなく、的確に運転者の運転特性を評価することを課題とする。
【解決手段】撮像装置2で撮像された運転者の頭部ヨーレートを検出する顔向き検出装置3と、車両1の車体ヨーレートを検出するヨーレートセンサ4と、顔向き検出装置3で検出された頭部ヨーレートと、ヨーレートセンサ4で検出された車体ヨーレートとの時系列データを比較して、頭部ヨーレートと車体ヨーレートとの間の位相進みTと相関係数φを演算する演算装置6と、演算装置6で得られた位相進みTと相関係数φとに基づいて、運転者の運転特性を判定評価する判定装置8とを備えて構成される。
(もっと読む)
車両の制御装置、制御方法およびその制御方法をコンピュータに実現させるプログラムならびにそのプログラムを記録した記録媒体
【課題】主電源が失陥しても、ブレーキ機構およびシフト機構のいずれもが作動不能に陥らない。
【解決手段】ECB−ECUは、主電源が失陥しているか否かを判断するステップ(S100)と、車速が予め定められた速度V(0)よりも小さいか否かを判断するステップ(S102)と、ECB−ECUに供給される電圧Vecbが予め定められた電圧Vecb(0)であるか否かを判断するステップ(S104)と、リレー回路をオンするステップ(S106)とを含むプログラムを実行し、SBW−ECUは、リレー回路がオンされると、Pスイッチが操作されるか(S108にてYES)、運転者または同乗者の降車意思を検知するか(S110にてYES)、車速が予め定められた車速V(1)より小さいか(S112にてYES)、補助電源電圧Vsbwが予め定められた電圧Vsbw(0)よりも小さいと(S114にてYES)、P入りシフト制御を実施するステップ(S116)を含む、プログラムを実行する。
(もっと読む)
自動停止制御装置
【課題】自車両が自動的に停止する場合に左右の他車両と横並びにならない位置に停止することができる自動停止制御装置を提供すること。
【解決手段】自車両3が停止すべき停止対象物(例えば、先行車両、赤信号、踏切等)32が検出された場合に、予め定められた停止位置Lに自車両を停止させる自動停止制御装置1であって、自車両3の車線と異なる他車線の他車両100、200を検出する他車両検出手段11、23と、他車両検出手段により他車両が検出された場合、該他車両と前後方向の位置をずらして停止させる停止位置制御手段12と、を有することを特徴とする。
(もっと読む)
車両制御装置
【課題】運転者に車両の運転が困難な緊急異常状態が発生した場合においても、自車両を安全に停車させることが可能となるように制御する車両制御装置を提供する。
【解決手段】CPU41は、スピーカ16を介して呼びかけを行っても、マイク18を介して運転者の応答が無い場合には、運転者の意識が無いと判定する(S1〜S2:YES)。そして、CPU41は、地図情報DB25に格納されるナビ地図情報と自車位置データから、車両2が一番左側の車線を走行している場合には(S5:YES)、車両ECU71を介してブレーキランプや左側方向指示器のランプ類を点滅点灯する等して、周囲の他車両に対して、車両2に緊急異常状態が発生して緊急停車する旨をアピールしながら、車両ECU71を介してブレーキ73、エンジン74、変速機75やステアリング駆動部76を駆動制御して当該車両2を道路の左側端縁に緊急停車させる(S6〜S8)。
(もっと読む)
車線逸脱防止装置
【課題】乗員への車線逸脱可能性があることの報知効果を高くする。
【解決手段】車線逸脱防止装置は、走行車線に対する車両の逸脱傾向の度合いに基づいて、車両に付与するヨーモーメントを算出し(ステップS9)、逸脱傾向の度合いが高い場合、算出したヨーモーメントを車両に付与し、走行車線に対する車両の逸脱を防止する(ステップS17)。この車線逸脱防止装置は、算出したヨーモーメントが所定値よりも小さい場合、該ヨーモーメントを増加補正するとともに、車両へのヨーモーメントの付与時間を短縮する補正をする(ステップS12〜ステップS14)。
(もっと読む)
車両用走行制御装置
【課題】本発明は、車両用走行制御装置に係り、車両運転者の脇見時にも車両の安全走行を確保することにある。
【解決手段】車両運転者によりクルーズコントロールスイッチがオン操作された場合に、自車両を先行車両に追従して走行させる車間制御の実行を許可する。また、顔向きカメラによる撮像画像を処理することにより運転者が顔を車両正面方向に向けない脇見状態の有無を判別する。そして、クルーズコントロールスイッチがオン操作されていない状況において、車両運転者が脇見状態にあると判別される場合にも、車間制御の実行を許可する。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる段階的な制動制御を行う。このときに、段階的な制動制御の実行中に運転者の急制動操作を検出したときには段階的な制動制御を中止して所定の制動力または制動減速度(例えば、自車が有する最大の制動力または制動減速度)により制動を実行する。この際に、運転者の急制動操作を、単に自動制動制御にそのまま優先させるのではなく、運転者の行う急制動操作よりもさらに急峻に所定の制動力または制動減速度を発揮させる。
(もっと読む)
1 - 20 / 51
[ Back to top ]