
Fターム[3D046HH22]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体速度 (1,046)
Fターム[3D046HH22]の下位に属するFターム
1つ又は複数の車輪速より演算 (178)
対地速度 (3)
Fターム[3D046HH22]に分類される特許
141 - 160 / 865
車両挙動制御装置
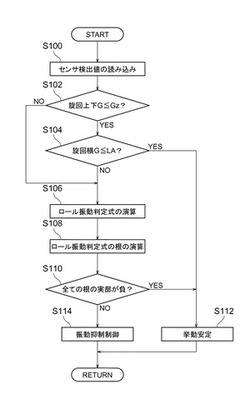
【課題】簡易な制御でロール振動の発生を効果的に抑制できる車両挙動制御装置を提供する。
【解決手段】車両挙動制御装置1では、車両のロール角、ヨー角、横力、上下変位に基づいて車両におけるロール振動の発生の有無を判断し、ロール振動の発生を検出した場合、内輪の横力Finよりも外輪の横力Foutを減少させる。これにより、車両と路面との横方向μが低下し、車両の横滑りが生じるため、ロール振動時に車両の外輪側で発生する上下方向の運動エネルギーを、車両が旋回外側にシフトする方向の運動エネルギーに変換することが可能となり、ロール振動が効果的に抑制される。また、横力の制御にあたり、普及率の高まっているVSC制御部10による各車輪のブレーキ圧制御を用いることで、高い応答性を確保しつつ、制御手段の複雑化を回避できる。
(もっと読む)
車両のブレーキ制御装置

【課題】有段自動変速機を備え、かつ回生協調ブレーキ制御を行う車両において、制動時における第1の変速完了後、第2の変速が開始されるまでの間における摩擦ブレーキの増圧遅れを防止することにより、運転者の要求する車両減速度を満足できる車両のブレーキ制御装置を提供すること。
【解決手段】回生ブレーキトルクが駆動輪に出力されている最中に変速が要求されたとき、回生ブレーキトルク目標値の割合を減少させるとともに摩擦ブレーキトルク目標値の割合を増加させる第1制御と、変速を開始させる第2制御と、回生ブレーキトルク目標値の割合を増加させ第3制御と、を行う回生協調ブレーキ制御手段において、第1の変速終了後の前記第3制御中に、第2の変速の要求を予測し、第2の変速が予測される場合、摩擦ブレーキトルク目標値を減少から増加に切り換えるときの時間当たり変化量の変動を抑制する車両減速度低下防止手段を有する。
(もっと読む)
車両の走行安全装置
【課題】車両の進行方向前方に存在するカーブを通過する際において、適切に安全装置を作動させる。
【解決手段】自車両の進行方向前方の所定距離内に存在するカーブの密度を算出するカーブ密度検出部15を備え、車両状態検出部13により検出された車両状態が適正車両状態設定部19により設定された適正車両状態であるか否かを判定するための判定閾値を学習部16により学習されたカーブ走行時における運転者の運転特性に基づいて変更する判定閾値変更部17は、カーブ密度検出部15により算出されたカーブ密度が所定値以下の場合には、変更した判定閾値を徐々に初期の値へと戻す。
(もっと読む)
車両走行制御システム
【課題】ナビゲーションシステムの持つ地図情報と地図情報以外から得られる情報(例えば、カメラなどの撮像装置による白線認識)の両者を有効に利用して安定性の高い速度制御を行う。
【解決手段】地図情報に応じて第1の目標速度を演算し、地図情報以外から得られる道路形状(例えば、カメラにより検出される白線認識結果)に応じて第2の目標速度を演算し、第1の目標速度と前記第2の目標速度を比較して、より低い目標速度を選択して自車の速度を制御する。
(もっと読む)
車両の走行安全装置
【課題】安全装置の作動許容範囲を拡大する。
【解決手段】自車両の車両状態を検出する車両状態検出部13と、記憶部11の道路データに基づき自車両の進行方向に存在するカーブの形状を認識するカーブ認識部14と、認識したカーブの形状に基づき該カーブを適正に通過可能な適正車両状態を設定する適正車両状態設定部16と、自車両の車両状態と適正車両状態とを比較する比較部17と、自車両の旋回状態を検知する旋回状態検知手段と、自車両の車両状態が適正車両状態にないときに自車両に設けられた安全装置20の作動を許容し、自車両が旋回状態であることが検知された場合に安全装置20の作動を行わない作動部18と、を備える車両の走行安全装置10であって、自車両がカーブ進入初期状態であるか否かを判定するカーブ進入初期状態判定部15を備え、作動部18は自車両がカーブ進入初期状態である場合には安全装置20の作動を許容する。
(もっと読む)
車両制駆動制御装置
【課題】 段差乗り上げ時の車両のオーバーランを防止することができる車両制駆動制御装置を提供する。
【解決手段】 車両Mが段差に乗り上げている状態であり、かつアクセルペダル2が踏み込まれているとき、補助制動力設定部28は、補助制動力設定値をブレーキ12へ出力する。そして、ブレーキ12は補助制動力設定値に基づき、車輪4に補助制動力を付与する(S3)。乗り上げ状態判定部25が、乗り上げ状態中と判定しており、かつアクセルペダル2が踏み込まれているときは車輪4に補助制動力が付与されている。よって車両Mが完全に段差に乗り上げた後、運転者がアクセルペダル2を踏み込んでいる状態から足を離し、ブレーキペダル3を踏み込むまでの間には、既に車輪4に補助制動力が付与されているため、車両Mにかかる走行力は抑制される。そのため、車両Mの加速を回避し、オーバーランを防止することができる。
(もっと読む)
作業車両
【課題】 本発明の課題は、本発明の課題とするところは、HST中立時のオートブレーキ制御を可能としながら、車速を検出し、所定速度以下になるとブレーキをかける制御とすることで、車両の確実な停止、安全性の向上を図る。
【解決手段】車体の走行速度を変速制御する油圧式無段変速装置(3)と、前後進変速操作可能な変速操作具(23)と、車速を検出する車速センサ(40)と、走行伝動系に制動を付与する走行用制動装置(40)を備え、前記変速装置(3)の前後進中立位置で車速が所定速度以下になると車速検出結果に基づき制動装置(40)を作動させてブレーキ制御する。
(もっと読む)
物体検出装置
【課題】受信波の電波強度が低い物体を検出する際でも、誤検出が少なく、一旦検出した物体をロストし難い物体検出装置を提供する。
【解決手段】ACCシステム1は、ミリ波レーダ10と、ステレオカメラ11と、これらの検出状態を示す物体種別情報を求める先行車認識ECU20と、物体パラメータおよび物体種別情報に基づいてブレーキアクチュエータ40や電子制御式スロットルバルブ41などを制御する走行制御ECU30とを備える。ミリ波レーダ10が低閾値で検出した物体については、ステレオカメラ11でも検出された物か、過去にミリ波レーダ10が高閾値で検出した物体を先行車候補とする。これにより、受信波の電波強度が低い物体を検出する際でも、誤検出が少なく、一旦検出した物体をロストし難い。
(もっと読む)
車両走行制御装置および車両走行制御方法
【課題】自車両の発進直後に、自車両に停止保持制動力を与えることを抑制することができる車両走行制御装置および車両走行制御方法を提供すること。
【解決手段】車両走行制御装置1−1は、ブレーキ装置8により停止保持制動力を自車両に与える停止保持制御を行う停止保持制御部22と、停止保持制御を解除して、エンジン9により発進駆動力を自車両に与え、自車両を発進させるアクセルペダル6と、運転者による発進意志を検出するアクセルペダルセンサ7を備える。車両走行制御装置1−1は、停止保持制御部22による停止保持制御中に自車両を発進させる際、アクセルペダルセンサ7により運転者による発進意志を検出した後、すなわち停止保持制御の解除後、発進意志が検出されなくなってから所定時間、停止保持制御部22による停止保持制御を禁止する。
(もっと読む)
車両走行制御装置及び車両走行制御方法
【課題】車両が路面の凸部を通過する際の衝撃を和らげることができる車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】車両の前方路面にある凸部の形状を検出する凸部検出手段と、前記凸部の形状に基づいて加速度を設定する減速加速度設定手段と、前記凸部から第一の距離手前の地点を第一地点、前記第一地点から第二の距離手前の地点を第二地点として設定する地点設定手段と、前記第二地点から前記第一地点の間において前記車両を前記加速度で減速させ、前記第一地点に到達すると前記車両の減速を解除する速度制御手段と、を備える車両走行制御装置。
(もっと読む)
車両制御システム
【課題】一般的な鉄道車両が搭載している車上で停止ブレーキを作成することができる設備のみで車両の定時運行を実現する列車自動運転制御を提供する。
【解決手段】停車位置に停車するために考えられる複数のブレーキパターンを持っている、あるいは複数のブレーキパターンを動的に作成することができ、また、車両のブレーキ段と地形の勾配情報から求まる当該列車の実減速度に基づき次の停車位置に到着する時間を予測する手段を持つ車上制御装置を有するシステムにおいて、車両の現在位置から次の停車位置に到着する到着予測時間と、ダイヤにより定まっている次の停車位置に到着する到着予定時間を比較し、駆動力もしくはブレーキ力を制御することにより、車両の定時運行を自動的に実現する。
(もっと読む)
車両の減速制御装置
【課題】 警報制動が必要であり乗員が警報制動を認識できる状況に於いては確実に警報制動を行うと共に、警報制動が必要であるが乗員が警報制動を有効に認識できない状況に於いては警報制動に起因して乗員が違和感を覚えることを防止する。
【解決手段】 車輌の前方に障害物があり(410)且つ運転者により制動操作が行われておらず(415)且つ運転者がわき見をしており(420)、車輌が障害物に衝突する虞れがある状況に於いて(460)、警報制動の最大目標減速度Gbt2maxを演算し、自動走行制御が行われていないとき(510)及び自動走行制御が行われその目標減速度Gbt4が最大目標減速度Gbt2maxよりも小さい基準値Gbt4s未満であるとき(515)には警報制動を行うが(520〜565)、自動走行制御の目標減速度Gbt4が警報制動の許可基準値Gbt4sよりも大きいとき(515)には、警報制動を行わない。
(もっと読む)
衝突回避システム
【課題】衝突回避や衝撃を軽減する衝突回避システムにおいて、フェイルセーフ状態であってもアクチュエータの出力を制限せず、運転者の回避操作支援が可能な衝突回避システムを提供すること。
【解決手段】衝突の回避又は衝撃軽減するように車載装置を制御する衝突回避システムにおいて、車両に接近する障害物を検出する障害物検出手段(11、12、17)を有し、車載装置への出力を制限するフェイルセーフの状態で、障害物検出手段により異常接近する障害物が検出された場合、車載装置への出力制限を一時的に解除する、ことを特徴とする。
(もっと読む)
車両停止装置
【課題】 運転者の意識低下を検出したとき、他の車両の通行の妨げにならない場所に車両を強制停止する
【解決手段】 走行中に運転者の意識低下(居眠り等)を検出した場合(S14:YES)、前方の道路周辺状況を検出して目標停止位置を決定する(S18)。この目標停止位置は、道路端の検出有無、障害物の有無、白線の有無、路肩幅、適正減速度等に基づいて決定する。そして、目標停止位置に停止するために必要な横移動距離Wに基づいてタイヤ切れ角δを算出し(S22)、舵角制御とブレーキ制御とにより車両を目標停止位置に自動操縦する(S22〜S24)。舵角制御不能の場合には(S21:NO)、左右輪に制動力差を発生させて車両の向きを変えて目標停止位置に案内する。
(もっと読む)
車両の制御装置
【課題】 車速センサの安定した検出特性を有効に活用して加速度センサの検出精度を向上させることのできる車両の制御装置を実現する。
【解決手段】 車両の走行に伴って回転する回転体から検出したパルス信号に基づいて車両の速度を検出する車速センサ7と、車両が停止状態から移動状態に移行したことを判定する判定手段21と、車両が停止状態から自動変速機のクリープ力によって移動状態に移行した状態での所定時間内におけるパルス信号のバラツキが小さい場合には加速度センサ8を基準値に再設定する制御手段22と、を備えて車両の制御装置を構成する。
(もっと読む)
車両の操舵制御装置
【課題】旋回中に強くブレーキを踏み、車輪がロックしてしまうような状況においても、舵角を適切に制御して十分な制動力を確保する。
【解決手段】操舵制御部20は、通常時は第1の前輪舵角補正量と第2の前輪舵角補正量とに基づいて前輪舵角補正量を演算し、モータ駆動部21にモータ回転角の信号を出力する。そして、旋回制動中でABSが作動し、車両が目論見とする旋回ができていないと判定した場合、車両が旋回していく方向に前輪舵角を補正させる前輪舵角補正量を演算し、モータ駆動部21にモータ回転角の信号を出力する。
(もっと読む)
車両用制動力制御装置および車両用制動力制御方法
【課題】車両の姿勢変化が極力小さい状態で障害物を回避し、障害物回避後に他の障害物の回避が行いやすい制動力制御を行う。
【解決手段】障害物検出部110で検出した障害物の位置と自車両走行状態検出部120により検出された自車両の走行状態とに基づいて、制動力制御実施判定部131により制動力制御の必要性が判定される。制動力制御が必要である場合は、自車両の走行状態に基づいて予測走行軌跡算出部132により算出された予測走行軌跡と障害物の位置とから障害物回避判定部133により障害物回避判定が行われる。障害物回避ができないと判定された場合は、制動力指令値算出部134により制動力指令値が算出され、制動力指令値により制動力発生部140が制御される。
(もっと読む)
車両制御装置
【課題】カーブを走行する際、通過可能な車速となるように自車を減速させることができる車両制御装置を提供する。
【解決手段】カーブ道路を走行する際、そのカーブ道路に対して設定した目標速度Vs0_tまで自車を加減速するための目標加減速度dVs0/dtを算出し、自車の現在の速度Vs0と目標速度Vs0_tとを比較した結果に基づいて、自車に発生する加減速度が目標加減速度dVs0/dtとなるように加減速制御を行う。
(もっと読む)
電動パーキングブレーキ装置
【課題】 ギア位置スイッチの数を増やすことなく、2つのギア位置スイッチのいずれかの固着故障によりスイッチ信号の組み合わせにより判定されるギア位置が誤っていても、パーキングブレーキの解除や継続を支障なく行うことができる電動パーキングブレーキ装置を提供すること。
【解決手段】 クラッチ2とマニュアルトランスミッション3を有する駆動系を備え、パーキングブレーキ作動による停止時、ギア位置が前進または後退と判定され、自動解除条件が成立したとき、パーキングブレーキを自動的に解除する電動パーキングブレーキ装置において、2つのニュートラルスイッチ35とリバーススイッチ36からのスイッチ信号の組み合わせにより判定した変速ギア位置と、エンジン1の駆動力が左右後輪タイヤ8,9へ伝達可能なクラッチ接続状態で生じる駆動系回転変化により判定される変速ギア位置と、が一致しないとき、システム故障であると判定する故障判定手段(図3)を設けた。
(もっと読む)
電動パーキングブレーキ用制御装置
【課題】 車両が停止してから直ぐに自動引きを行なうようにし、応答遅れを無くして商品性の向上を図ること。また、坂道の場合で、走行から停車時にパーキングブレーキを自動引きしてドライバーの負担を軽くすること。
【解決手段】 アクセルペダルが解除され、ブレーキペダルが踏まれる前の車両の減速度Ggを検出し、この検出値から路面の勾配を判定する。記憶部38のテーブルから予め設定しておいた目標荷重を取り込み、停車が確定してから電動モータ16を正転駆動する。そして、電動モータ16を目標荷重まで作動させて時刻t1で電動モータ16を停止させる。
(もっと読む)
141 - 160 / 865
[ Back to top ]