
Fターム[3D046HH22]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体速度 (1,046)
Fターム[3D046HH22]の下位に属するFターム
1つ又は複数の車輪速より演算 (178)
対地速度 (3)
Fターム[3D046HH22]に分類される特許
61 - 80 / 865
シフト切換機構の制御装置および制御方法
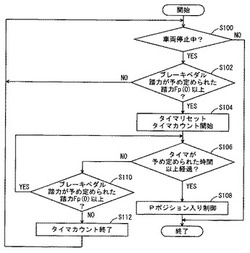
【課題】車両の停車状態に応じて自動的にパーキングポジションにシフトポジションを切り換える。
【解決手段】SBW−ECUは、車両が停止中であって(S100にてYES)、ブレーキペダル踏力が予め定められた踏力Fp(0)以上であると(S102にてYES)、タイマをリセットするステップ(S104)と、予め定められた時間が経過するまでに(S106にてNO)、ブレーキペダル踏力が予め定められた踏力Fp(0)よりも減少すると(S110にてNO)、タイマカウントを終了するステップ(S112)と、予め定められた時間が経過すると(S106にてYES)、Pポジション入り制御を実行するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
自動制動制御装置

【課題】制動が開始されるタイミングをユーザが認識することができる自動制動制御装置を提供する。
【解決手段】車両の位置21が自動制動開始位置32より500mの位置になると、自動制動開始位置の拡大地図30aが分割画面として表示される。拡大地図30aには、自車位置マーク21とともに自動制動開始位置までの距離を示したインジケータ31aと、自動制動開始位置を示す自動制動開始位置マーク32とが表示される。インジケータ31aでは、車両の位置と自動制動開始位置との間の距離がバーの長さで表示され、自動制動開始位置に近づくにしたがってバーの長さは短くなる。車両の位置が自動制動開始位置より20mの位置になると、拡大地図30aに比べて縮尺率の大きい自動制動開始位置の拡大地図30bが分割画面として表示される。拡大地図30bには、拡大地図30aと同様に、自車位置マーク21とともにインジケータ31bと自動制動開始位置マーク32とが表示される。
(もっと読む)
車両制御装置
【課題】車両制御装置において、アイドル運転状態で停止している際に、エアコン等の操作により、エンジントルクが増加した場合においても、クリープ現象による車両の移動の抑制を可能にする。
【解決手段】オートマチックトランスミッションを搭載した車両において、アイドル運転状態で且つオートマチックトランスミッションのレンジがニュートラルレンジまたはパーキングレンジ以外のレンジで停止している場合に、エアコンを作動させる等により、エンジン負荷を大きくさせるような操作を行うと、エンジントルクを増加させる前にブレーキの制動力をアシストする制御を実行することで、運転者の意に反して車両が動き出すことを抑制することができる。
(もっと読む)
車両制御装置
【課題】アクセル操作とブレーキ操作を1つのペダルで兼用する車両制御装置において、従来よりも車速制御をしやすくすること。
【解決手段】ペダル40の踏み込み量によって車速を制御する速度制御部100を設ける。この速度制御部100は、ペダル40が速度制御踏み込み範囲内で踏み込まれたときは車速を減速させ、速度制御踏み込み範囲内でペダル40が戻されたときは車速を加速させる。また、ペダル40が速度制御踏み込み範囲よりも深い制動範囲まで踏み込まれたときは、その踏み込み量に応じた制動力で車両を制動させる。ペダル40の踏み込み量の大小によって車速を制御することができるので、速度制御がしやすくなる。しかも、速度制御踏み込み範囲を超えてさらに深い範囲まで十分に踏み込むことにより急ブレーキをかけることも可能となる。
(もっと読む)
ベルト式無段変速機搭載車両の制御装置
【課題】車両の停止直前に油圧不足を防止することで変速比を十分にロー側へ戻す。
【解決手段】本発明は、ベルト式無段変速機搭載車両において、車両が停止する直前、セカンダリプーリへの供給圧を増大させることでベルト式無段変速機構の変速比を最もロー側へ移行させ、ロー戻し手段によってセカンダリプーリへの供給圧を増大させるとき、フォワードクラッチのクラッチ容量を低下させてフォワードクラッチを解放する(S21)。
(もっと読む)
ブレーキ制御装置
【課題】車両の燃費性能を向上させる。
【解決手段】ブレーキ制御装置は、電動機の回生制御により回生制動力を発生させる回生ブレーキユニットと、液圧源からの作動液の供給により液圧制動力を発生させる液圧ブレーキユニットと、運転者のブレーキ操作に応じて演算される要求制動力が満たされるように回生ブレーキユニット及び液圧ブレーキユニットを制御する制御部と、を備える。制御部は、回生制動力と液圧制動力との合計を要求制動力に一致させる制御状態から液圧制動力のみで要求制動力を発生させる制御状態へと移行するに際して、回生制動力と液圧制動力との合計が要求制動力を超えるように液圧制動力を増加させ回生制動力を減少させる。
(もっと読む)
ブレーキ制御装置
【課題】
騒音・振動が小さいポンプを複数用いたブレーキ制御装置において、一方のポンプに故障が生じた場合、他方のポンプで故障ポンプの機能を補って故障の影響を軽減すると、運転者はブレーキの故障に気付かない、又は気付いても故障を軽視してしまい、修理せずに故障状態を放置してしまう恐れがある。そこで、ブレーキ力を継続して確保しながら、ブレーキ装置に異常が発生していることを、運転者に効果的に気付かせる。
【解決手段】
故障が検出された場合、ホイールシリンダの液圧脈動が故障検出前よりも大きくなるように、液圧アクチュエータを制御する。または、互いに吐出液圧の脈動特性が異なる2つのポンプを、ホイールシリンダに対して並列に接続する。
(もっと読む)
運転支援装置
【課題】
信号に進入する車両に対する運転支援を行うにあたり、運転者にとって余計な運転支援とはならないようにする運転支援を行う運転支援装置を提供する。
【解決手段】警報判定ECU1は、警報しきい値設定部11、焦度判定部12、および警報判定部13を備える。警報判定設定部11は、各センサから出力された信号に基づいて運転者の信号停止操作を判定し、この信号停止操作に基づいて警報判定しきい値TDsおよび通過判定しきい値TDmを算出する。焦度12は、各センサから出力された信号に基づいて運転者の焦度を算出し、算出された焦度に基づいて信号到達時間補正値TDhを算出する。警報判定部13は、警報判定しきい値TDsおよび通過判定しきい値TDmを信号到達時間補正値TDhによって補正し、信号到達時間TDと比較することにより、警報判定を行う。
(もっと読む)
車両の走行制御装置
操舵制御手段、制駆動力制御手段、接地荷重制御手段を備えた車両に於いて、演算負荷や消費エネルギの増大を抑制しつつ各制御手段の制御量を最適化し、車両の走行運動を最適に制御する。
【解決手段】車両が緊急の走行運動制御を必要とするときには(440、450)、全ての制御手段についての評価関数を演算して車両全体の目標走行運動制御量を全ての制御手段に配分することにより各制御手段の目標制御量を演算し(700)、車両が緊急の走行運動制御を必要としないときには、車両の走行状態に基づいて特定の制御手段の目標制御量を演算し、特定の制御手段の目標制御量に基づいて特定の制御手段の制御による車両の物理量の変化量を演算し、車両全体の目標走行運動制御量及び車両の物理量の変化量に基づいて他の制御手段の目標制御量を演算する(500、600)。
(もっと読む)
車両およびその制御方法
【課題】車両の安定性が悪化するのを抑制する。
【解決手段】モータMG2のインバータ42のトランジスタのいずれかに異常が生じて閉回路が形成されたときには、ブレーキ64a,64bから前輪63a,63bに制動トルクを出力する。これにより、モータMG2の回転に伴って後輪66a,66bに作用する制動トルクとブレーキ64a,64bから前輪63a,63bに出力する制動トルクとがアンバランスになることによる車両の安定性の悪化を抑制することができる。
(もっと読む)
制動制御装置
【課題】後方衝突時における二次的事故の発生を防止しかつ自車両に加わる衝撃を軽減する制動制御装置を提供する。
【解決手段】車両の車輪に設けられたブレーキ装置10の制動力を制御する制動制御装置を、車両の衝突を検出する衝突検出手段41と、車両の前後方向における加速度を検出する加速度検出手段43とを備え、衝突検出手段41が衝突を検出した後、加速度検出手段43が検出した加速度が所定の閾値を下回った場合にブレーキ装置10に制動力を発生させる構成とする。
(もっと読む)
車両挙動制御装置
【課題】制駆動力限界付近においてもドライバの意図する車両の加減速性と旋回性を実現する各車輪の制駆動トルクを演算すること。
【解決手段】車両挙動情報、車両外界情報に基づいて車両の目標挙動制御量を演算する手段と、ドライバの加減速要求と旋回要求を検出し、これらをドライバ要求量として演算する手段と、目標挙動制御量とドライバ要求量から、目標加速度と目標ヨーモーメントを演算し、これらを実現するように各車輪の目標制駆動力を演算し、各車輪の制駆動トルクを制御する装置において、目標ヨーモーメントに対する目標加速度の優先度を加速度優先度として、ドライバ要求量と目標挙動制御量に基づいて演算し、各車輪に対し制駆動力上限値と下限値を演算する手段を備えて、少なくとも一輪の目標制駆動力が制駆動力上限値又は下限値を超える場合、制駆動力上限値と下限値、加速度優先度に基づいて各車輪の目標制駆動力を演算すること。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】車両の走行中において車輪に制動力が付与された場合に、該制動力が付与される車輪側からの異音の発生を抑制できる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】車両の制動制御装置のECUは、ステアリングホイールの操舵角Aの絶対値が操舵角閾値KA以上である場合に、車両の旋回方向内側の後輪(例えば右後輪)を制動用車輪に設定し、該制動用車輪に対して制動力を付与する旋回時制動制御を実行する。そして、ECUは、車両の車体速度VSが変動開始用車体速度閾値KVS2以下である場合に、制動用車輪(例えば右後輪)に対する制動力BPの大きさが予め設定された所定振幅で変動するように、制動力付与機構を制御する。
(もっと読む)
車両用走行支援装置
【課題】車両制動を迅速に行うこと。
【解決手段】車両用走行支援装置10は、運転者の状態を検出する運転者状態検出手段2aと、運転者状態検出手段2aにより検出された運転者の状態に基づいて、運転者の運転に対する集中度を推定する運転集中度推定手段2と、運転集中度推定手段2により推定された運転者の集中度が高い状態よりも、運転者の集中度が低い状態の方が、運転者の制動操作に対する車両の減速度の立ち上がりをより大きくするような制動準備を行う制動準備手段1と、を備えている。
(もっと読む)
ETCレーン走行中にヨー制御される車輌
【課題】ETCレーンは両側縁をかなり高い縁石にて限られたかなり狭い通路であり、車輌が正しく直進走行させられないと、車輪を縁石に接触させる恐れがあるが、ヨーレート偏差に基づいてヨー制御を行う挙動制御装置は、これを発動させるヨーレート偏差の閾値がETCレーン走行時に要するヨー微調整のヨーレートよりも大きいので、ETCレーンでは作動しない。この点を改良してETCレーンでも挙動制御装置を作動させる。
【解決手段】ETCレーンを走行する間、車体ヨー変化を制御するヨー制御手段の発動を抑制する車体ヨー変化の閾値を臨時に低減する。
(もっと読む)
制動装置の制動利得特性が可変に制御される車輌
【課題】摩擦係数が低い低μ路に於いて制動時の車輪スリップを抑制しつつ許容される時間内に十分な減速効果を上げることができるようにする一方、摩擦係数が高い高μ路に於いては軽い制動操作で快適な制動が達成されるようにする。
【解決手段】路面の摩擦係数の大小を判別し、低μ路に於いてはブレーキペダルの踏量に対する制動力の増大率を表す制動利得を踏量が小さいとき小さくし、踏量が大きいとき大きくし、また高μ路に於いては踏量が小さいとき大きくし、踏量が大きいとき小さくする。
(もっと読む)
停止判定装置及び電動パーキングブレーキ制御装置
【課題】車両の停止判定を適切に行うことができる停止判定装置等を提供する。
【解決手段】車両の停止を判定する停止判定装置40を、車両の前後方向における加速度を検出する加速度センサ43と、車両の停止時における車両のピッチング方向の挙動に起因する加速度センサ43の出力変動が、ピッチングが収束することにより所定の期間にわたって予め設定された閾値以下となったことに応じて車両の停止を判定する停止判定部41とを備える構成とする。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】坂道での停車後、早期に路面傾斜度に応じた電動パーキングブレーキの作動を行うとともに、車両の動き出しを確実に防止できる電動パーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキ10を駆動する電動アクチュエータ20を制御する電動パーキングブレーキ制御装置40を、車両の走行中にその走行状態に基づいて推定される動的推定路面傾斜度と、車両の停車後に車両に作用する加速度に基づいて推定される静的推定路面傾斜度とをそれぞれ求め、車両の停止後、静的推定路面傾斜度が動的推定路面傾斜度よりも大きい場合にパーキングブレーキ10の制動力を動的推定路面傾斜度に基づいて設定される制動力よりも増加させる構成とする。
(もっと読む)
操舵制御装置、及び操舵制御方法
【課題】車両旋回力の低下を防止し、高い操舵性能を確保することのできる操舵制御装
置を提供すること。
【解決手段】ステアリング1の操舵状態に基づいて、車両の旋回目標値を算出する旋回
目標値算出手段と、アシストモータ5が作動することによって得られる操舵補助力、及び
ブレーキアクチュエータ36FR、36FL、36RR、36RLが作動することによっ
て得られる車両の制動力を制御することによって、旋回目標値を達成する旋回制御手段と
を装備する。
(もっと読む)
車両運動制御装置
【課題】車輪のグリップ限界における制御特性の変化を穏やかなものとし、ドライバが違和感無く、車両を適切に制御して安定性の向上を図る。
【解決手段】スロットル弁制御装置1では、マップ設定部1aで、予め設定しておいたアクセル開度−スロットル開度のマップにおいて、路面μの値に応じて可変閾値εを定める。可変閾値εは、路面μが高い程、高い値に、路面μが低い程、低い値に設定される。アクセル開度は、可変閾値εより高い領域においては、アクセル開度に対するスロットル開度の変化量が、通常の変化量より低下させられて設定される。すなわち、路面μが高い場合には、通常の特性であっても十分安定性を確保して走行できるが、路面μが低い場合には、アクセル開度に対するスロットル開度の変化量を小さくして、ドライバのアクセル操作に対して十分な安定性を確保できるような特性へと変化させる。
(もっと読む)
61 - 80 / 865
[ Back to top ]