
Fターム[3D046HH22]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体速度 (1,046)
Fターム[3D046HH22]の下位に属するFターム
1つ又は複数の車輪速より演算 (178)
対地速度 (3)
Fターム[3D046HH22]に分類される特許
21 - 40 / 865
自動制動装置
【課題】運転者が操作入力を怠った場合でも自車両と障害物との衝突を回避する可能性を高めることのできる自動制動装置を低コストで実現する。
【解決手段】自動制動装置に、自車両の障害物への衝突の可能性を判断する衝突可能性判断手段と、運転者の操作入力を検出する操作入力検出手段4と、障害物と自車両の左右方向の位置関係を検出する位置関係検出手段2と、位置関係検出手段2の検出結果に基づいて自車両の回避可能方向を判断する回避可能方向判断手段と、衝突可能性判断手段により障害物に衝突する可能性があると判断され、かつ操作入力検出手段4により運転者の操作入力が検出されていない場合に、回避可能方向への自車両の回頭性が高まるように、各車輪のブレーキ力に差を生じさせてブレーキ20を自動作動させるブレーキ力制御手段と、を備える。
(もっと読む)
車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体

【課題】ブレーキペダルが操作されていなくてもブレーキ力が保持される場合がある車両において、クリープトルクを適切に抑制することにより無駄なエネルギ消費を削減する。
【解決手段】ECUは、クリープトルク反映率を設定するステップ(S108)と、ブレーキがオンされ(S110にてYES)、停車中であると(S112にてYES)、クリープトルク反映率を0に更新するステップ(S114)と、ブレーキがオフされていても(S110にてNO)、ブレーキ油圧が油圧値P(0)より大きいと(S118にてYES)、ブレーキホールド制御中であると判断して(S120)、ブレーキ油圧をパラメータとするマップに基づいて、クリープトルク反映率を低減して更新するステップ(S124)とを含む、プログラムを実行する。
(もっと読む)
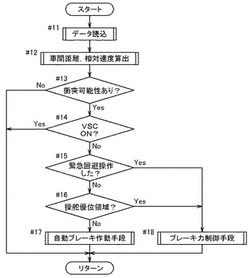
自動制動装置
【課題】車両の走行状態や運転者の操舵入力又は制動入力に対する車両の走行状態の応答特性に合わせてタイミングよくブレーキを自動作動させることのできる自動制動装置を実現する。
【解決手段】自動制動装置に、自車両の障害物への衝突を操舵により回避可能な障害物までの操舵回避距離を算出する操舵回避距離算出手段と、自車両と障害物との実距離Lが前記操舵回避距離より短くなるとブレーキ15を自動作動させる自動ブレーキ作動手段と、自車両の走行状態を検出する走行状態検出手段5と、を備え、走行状態検出手段5の検出結果に基づいて、操舵により障害物への衝突を回避すると自車両が不安定になると判断される場合には、自動ブレーキ作動手段によるブレーキ15の自動作動開始時期を早めるように、前記自動ブレーキ作動手段を構成する。
(もっと読む)
車両状態判定装置
【課題】タイヤがグリップ状態にあるときに、ロール角加速度に基づいて車両のロール状態を判定することにより、特別なセンサ等を設けることなく、適切にロール状態を判定する車両状態判定装置を提供することを目的とする。
【解決手段】本発明は、タイヤ91a、91bによる路面のグリップ状態を判定するグリップ判定手段10と、
車両100のロール角加速度を算出するロール角加速度算出手段20と、
操舵角を検出する操舵角検出手段30とを備え、
前記グリップ判定手段によりグリップ状態にあると判定されたときに、前記ロール角加速度算出手段により推定されたロール角加速度と、前記操舵角検出手段により検出された操舵角とに基づいて、ロール状態判定を行うことを特徴とする。
(もっと読む)
走行制御装置
【課題】定速走行制御と追従走行制御とを切り替える時に各制御による制御値を滑らかに推移させながらも制御性能を悪化させない走行制御装置を提供すること。
【解決手段】積分制御を含むフィードバック制御により車速Vを目標車速V*に制御する定速走行制御、及び、積分制御を含むフィードバック制御により車間距離Xを目標車間距離X*に制御する追従走行制御を有する走行制御装置100は、追従走行制御に関する制御値Vx及び定速走行制御に関する制御値V*の二つの対応する制御値を切り替えて何れか一方の制御値を出力させる制御切り替え手段SW1と、制御切り替え手段SW1が出力する制御値Vtに基づいて車輌における制駆動力を制御する制駆動力制御手段14と、制御切り替え手段SW1による切り替え時に二つの対応する制御値を等しくして走行制御を継続させる走行制御手段1と、を備える。
(もっと読む)
車両およびその制御方法
【課題】駆動系の起動処理を実行するために運転者が煩雑な操作を行なわなければならなくなるのを抑制する。
【解決手段】パワースイッチからプッシュ信号が入力されてから所定時間tlat1が経過する前にシフトポジションが走行ポジションにシフト操作されたときには、シフト操作されないときの所定時間tlat1よりも長い所定時間tlat2が経過するまで起動指示フラグFに値1を設定し続ける即ち起動指示を行ない続ける。これにより、シフトポジションが走行ポジションにシフト操作された後に再び非走行ポジションにシフト操作されたときに起動処理実行条件が成立する可能性を高くすることができる。この結果、起動処理を実行するために運転者が煩雑な操作を行なわなければならなくなるのを抑制することができる。
(もっと読む)
クリープグローンを抑制する車輌用制動装置
【課題】ブレーキペダルの踏み込みに応じてブレーキディスクにブレーキパッドを押し付けることにより車輪の回転を制動する車輌用制動装置に於いて、クリープグローン抑制のために制動力が所定の目標値より外れる度合を最小限に抑えてクリープグローンの発生に遅れなく対処することができる車輌用制動装置を提供する。
【解決手段】車輪がブレーキペダルの踏み込み度合の低下に伴って回転し始めたときから始まって、一時的にブレーキディスクにブレーキパッドを押し付ける押圧力をブレーキペダルの踏み込み度合に対応する値より低減する。
(もっと読む)
車両用駆動力制御装置
【課題】検出対象の位置検出精度の問題で良好な駆動力制御が妨げられることを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の先方の環境を検出し、前記環境に適した駆動力制御を行う車両用駆動力制御装置であって、道路上又は道路周辺の印の情報を予め記憶する記憶手段と、前記印を検出する手段と、前記検出された印に基づいて車両と前記環境との距離情報を求める手段(S40)と、前記距離情報に基づいて、駆動力制御を行う(S70)。
(もっと読む)
車両の制動装置
【課題】制動時における車室内の快適性を向上できる制動装置を提供する。
【解決手段】ブレーキペダルの操作量に応じた制動力を発生するポンプ8を備えた車両の制動装置である。所定条件下、ポンプ8の作動による制動力の変化速度を、車体速度やエンジン回転数に応じて変更し、当該車体速度若しくはエンジン回転数が低い程、当該変化速度を小さく抑える。
(もっと読む)
車両後部追突時制動制御装置
【課題】車両が停車しているときや減速且つ停車直前のときに、追突荷重が車両後部の衝撃吸収構造の変形により吸収できない程過大な場合でも、乗員にダメージを軽減できる車両後部追突時制動制御装置を提供すること。
【解決手段】車両後部追突時制動制御装置1は、車両の走行速度を検出して速度信号を出力する車速センサ9と、車両への後続車の追突を検出して追突荷重信号を出力する加速度センサ10と、速度信号に基づいて車両の走行速度が低速または零であると判定し、且つ、追突荷重信号から車両に後続車の追突荷重が入力されたと判定したときに、車両の車輪に対してブレーキをかける制動制御部5とを備えている。しかも、制動制御部5は、追突荷重が前記車両の後部の衝撃吸収構造により吸収可能な範囲外であると追突荷重信号から判断したとき、車輪のブレーキを解除するようになっている。
(もっと読む)
周辺監視装置および周辺監視方法
【課題】外部の状況を鑑みて不要な情報提供や動作制御を抑制・禁止する周辺監視装置および周辺監視方法を提供すること。
【解決手段】カメラ31が撮影し、前処理部11による処理が施された入力画像から歩行者認識部18が歩行者を認識するとともに、特定環境検知部19が信号前停止、横断歩道前停止、歩道状態、道路種別、走行車線など歩行者を認識してもその歩行者との衝突が発生する可能性が低く、情報提供や車両制御の必要性が小さい特定の状況を検知する。そして特定の状況を検知した場合には、運転者に対する報知や車両動作の制御を禁止・抑制する。
(もっと読む)
車両用駆動力制御装置
【課題】車両前方の道路環境に対応して、車両に減速度を作用させる車両用駆動力制御装置であって、運転者の減速意図が検出された地点に近いところで減速制御が開始されることが可能な車両用駆動力制御装置を提供する。
【解決手段】車両前方の道路環境を検出する手段と、前記道路環境に対して予め設定された特定領域内に車両がいるか否かを判断する手段(S005)と、運転者による減速意図が検出されたときに前記道路環境に対して適切な車両走行状態となるための減速度を作用させる手段と、運転者が前記減速意図を示したときの車両位置が前記特定領域の外である場合に、前記特定領域を拡大する手段(S008)とを備えている。
(もっと読む)
制駆動力制御装置
【課題】制動力発生装置に経年変化や異常が生じても各車輪に適切な制動トルクを発生させること。
【解決手段】車輌の目標制動力と実際の車輌の制動力との差が所定値を超えたときに油圧制動トルク発生装置(ブレーキアクチュエータ23等)又はモータ31FL,31FR,31RL,31RRに異常ありと判定する制動装置異常判定手段41iを設け、この制動装置異常判定手段41iが異常ありと判定した際に、車輌の目標制動力と実際の車輌の制動力とを一致させるように設定された各車輪10FL,10FR,10RL,10RRの内の少なくとも一輪と残りの車輪の夫々の全制動トルク間の相対関係に基づいて要求機械制動トルク又は要求モータトルクを補正するよう要求油圧制動トルク設定手段41f又は要求モータトルク設定手段41gを構成すること。
(もっと読む)
車両の運転支援装置
【課題】ドライバの走行する環境を精度良く検出し、自然で最適な警報や自動ブレーキ制御を行う。
【解決手段】制御ユニット8は、予めドライバの視線挙動に基づいて漫然状態と判定された際の入力画像を基準画像として設定する。そして、この基準画像と入力画像の正規化相関を演算し、この正規化相関の相関値から、ドライバの漫然状態を検出し、漫然状態と判定した場合には、警報の頻度を高め、衝突回避のための自動ブレーキ制御の開始タイミングを早めるように変更する。
(もっと読む)
車両の制御装置
【課題】車両周辺を撮像する撮像手段と、該撮像手段により撮像された画像データに対して所定の画像処理を行う画像処理手段とを備え、該画像処理手段における画像処理に基づいて作動する制御システムの作動制御を行う車両の制御装置において、画像処理手段の処理負担を増加させることなく、複数の制御システムの作動を効率よく制御する。
【解決手段】上記制御システムを低速時に作動する低速度領域性制御システムと高速時に作動する高速度領域制御システムとで構成するとともに、低速時(ステップSA1でNOのとき)には、低速度領域制御システムを作動させるとともに、上記画像処理手段による高速度領域制御システムのための画像処理を停止する一方、高速時(ステップSA1でYESの場合)には、高速度領域制御システムを作動させるとともに、上記画像処理手段による低速度領域制御システムのための画像処理を停止するようにする。
(もっと読む)
車両の障害物検知装置
【課題】急なカーブで障害物検知手段(レーダ装置)が対向車Qをいきなり検知したときであっても、その対向車Qの進行方向を正確に推定して、自車両Wの対向車Qへの衝突可能性を正確に予知する。
【解決手段】対向車Qについて検出された複数(A点〜E点)の相対位置(対向車Qの自車両Wに対する相対位置)に基づいて、該対向車Qの前面が自車両Wに対して向いている方向を推定し、この推定された対向車前面の向きに基づいて、該対向車の進行方向を推定し、自車両Wの進行路と、上記推定された対向車の進行方向と、該対向車について検出された相対位置及び相対速度ベクトルの大きさとに基づいて、自車両Wの該対向車Qへの衝突の可能性を予知する。
(もっと読む)
車体速度推定装置及び車体速度推定方法及び制駆動力制御装置
【課題】制動力発生装置に経年変化や異常の生じた車輪が混在していても精度良く車輪速度を推定させること。
【解決手段】少なくとも1つのモータ31FL,31FR,31RL,31RRのモータトルクを少なくとも複数の車輪10FL,10FR,10RL,10RRに対して個別に付与することの可能な車輌の車体速度を車輪の情報を用いて推定させる車体速度推定手段41dが具備された車体速度推定装置において、モータ回生トルクが働いている車輪の情報のみを利用してABS制御時の車体速度の推定を行うよう車体速度推定手段41dを構成すること。
(もっと読む)
走行制御装置
【課題】運転者に不快感を与えることなく車輌を緩速走行させる走行制御装置を提供すること。
【解決手段】算出した走行軌跡に沿って車輌を目標速度で緩速走行させる走行制御装置Sは、緩速走行に対し運転者が抱く警戒度を推定する警戒度推定手段102と、警戒度推定手段102の推定結果に基づいて目標速度を決定する目標速度決定手段103と、を備える。また、走行制御装置Sは、駐車支援又は狭路通過支援に利用され、警戒度推定手段102は、算出した走行軌跡に沿って車輌を走行させた場合における周辺物と車輌との間の距離に基づいて警戒度を推定する。
(もっと読む)
車両制御装置
【課題】車高の調整時に車両の各部にかかる負担を軽減する。
【解決手段】車高調整手段は、車両のばね上とばね下の間に車輪毎に介装され車体と車輪の間の距離を変えることで車高を調整する。ブレーキ設定部118は、車高調整手段による車高調整の実行中に車輪の回転を許すように制動手段によって発生する制動力を低下させる。ブレーキ設定部118は、傾斜測定部112により測定された路面の傾斜の大きさに応じて異なる制動力を設定する。
(もっと読む)
走行支援装置
【課題】車輌外観に関する情報を利用したより安全な走行支援を実現する走行支援装置を提供すること。
【解決手段】走行支援装置10は、車輌Aと車輌Bとの間で互いの車輌を外部から視覚的に識別させるための車輌外観に関する車輌情報を授受する車輌情報授受手段103と車輌情報授受手段103が授受した車輌情報を用いて走行支援を行う走行支援手段104とを備える。また、走行支援装置10は、車輌Aの所定行為に対する受諾を車輌Bに要求する要求信号を発信する要求信号発信手段102を備え、車輌情報授受手段103は、要求信号を受諾した車輌Bが返信する車輌情報を受信し、受諾信号を返信した車輌Bに自車輌Aの車輌情報を送信する。
(もっと読む)
21 - 40 / 865
[ Back to top ]