
Fターム[3D046HH39]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車輪状態 (1,034) | 車輪加減速度 (52)
Fターム[3D046HH39]の下位に属するFターム
慣性式
Fターム[3D046HH39]に分類される特許
1 - 20 / 52
車両用ブレーキ制御装置
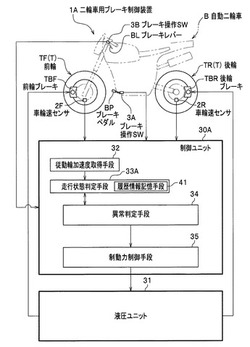
【課題】ウィリー走行中であっても、車輪速センサの異常判定をより精度良く行える車両用ブレーキ制御装置を提供することを目的とする。
【解決手段】二輪車用ブレーキ制御装置1Aは、前輪TF、後輪TRの車輪速度を取得する車輪速センサ2F、2R、液圧ユニット31、制御ユニット30Aを備えている。制御ユニットは、前輪車輪速度から車輪加速度を取得する従動輪加速度取得手段32と、車輪加速度に基づいて走行状態を判定する走行状態判定手段33Aと、車輪速センサの異常の有無を判定する異常判定手段34と、液圧ユニットを制御する制動力制御手段35を有している。異常判定手段は、後輪が非停止状態を示し、前輪が停止状態を示している場合に、走行状態判定手段に前輪が浮き上がったままの走行状態かどうか判定させ、その結果に基づいて前輪の車輪速センサに異常が有るか否かを判定する。
(もっと読む)
摩擦状態推定装置、自動車および摩擦状態推定方法

【課題】車輪と路面との間における摩擦状態をより正確に推定すること。
【解決手段】摩擦状態推定手段が、ブレーキパッドに印加される圧力と車輪の回転状態との関係、あるいは、ナックルとブレーキキャリパとの締結部に生じる歪みの少なくとも何れかを示す物理量に基づいて、車輪の摩擦状態(安定/不安定)を判定する。したがって、車輪と路面との間における摩擦状態をより正確に推定することができる。
(もっと読む)
タイヤ接地状態推定方法、タイヤ接地状態推定装置、タイヤ、及び、車輌制御装置
【課題】簡単な構成で走行中のタイヤの接地状態を精度よく推定することができるとともに、路面変化に対する追従性の高いタイヤの接地状態推定方法とその装置、タイヤの接地状態の推定に用いられるタイヤ、及び、車輌制御装置を提供する。
【解決手段】加速度センサ11をタイヤの赤道部近傍のブロック23B内部に、その検出方向がタイヤ回転方向になるように埋設するとともに、上記加速度センサ11の検出出力から蹴り出し時における上記ブロック23Bのタイヤ回転方向の振動波形を抽出し、この振動波形正側のピーク値Gの大きさに基づいて走行中のタイヤの接地状態を推定するようにした。
(もっと読む)
アンチロックブレーキ制御装置
【課題】ブレーキ7(FL,FR,RL,RR)の作動中に車輪6(FL,FR,RL,RR)がロック傾向になったときに制動力を減少させるアンチロックブレーキ制御を実行する装置20において、ブレーキング中に車輪6がジャンプしてから着地するときに、駆動系にかかる負荷を軽減可能とする。
【解決手段】ブレーキング中において車輪6が走行路面からジャンプすることによって、アンチロックブレーキ制御の実行条件が成立したときに、当該アンチロックブレーキ制御における制動力減少動作を抑制させる。これにより、ジャンプしていた車輪6が着地したときの制動力が従来例のように減少されずに済むので、着地時に車輪6に作用する負荷が車輪6およびブレーキ7で吸収されることになって、駆動系にかかる負荷が軽減される。
(もっと読む)
走行路面状態検出システム及びそのセンサユニット
【課題】低速から高速までのあらゆる速度での車両走行時における走行路面状態を迅速且つ的確に検出できる走行路面状態検出システム及びそのセンサユニットを提供する。
【解決手段】タイヤ2に設けられたセンサユニット100によって、タイヤ2の回転方向の加速度信号に重畳する微小振動を検出し、この微小振動信号を所定時間積分した積分値をディジタル情報としてモニタ装置200に送信する。モニタ装置200は、積分値が小さいときに走行路面とタイヤ2との間の摩擦が大きく、積分値が大きいときに走行路面とタイヤ2との間の摩擦が小さいとして、積分値と摩擦の大小を対応づけた路面状態情報をスタビリティ制御ユニット700に出力する。スタビリティ制御ユニット700は路面状態情報に基づいて制動制御等を行う。
(もっと読む)
ホイールベース長設定装置
【課題】搭載される車両の実際のホイールベース長の差異に起因した車両性能のばらつきを抑制できると共に、搭載される車両の実際のホイールベース長に対応可能に構成することによるコスト増大を抑制できるホイールベース長設定装置を提供する。
【解決手段】ホイールベース長設定装置のECUは、車両Cの前輪が路面上の異物Fを踏んだ場合には、そのときの前側検出時間TVWF及び前側検出時車体速度を検出する。また、ECUは、車両Cの後輪が路面上の異物Fを踏んだ場合には、そのときの後側検出時間TVWR及び後側検出時車体速度を検出する。そして、ECUは、前側検出時間TVWF及び前側検出時車体速度と、後側検出時間TVWR及び後側検出時車体速度とから算出用ホイールベース長を算出し、該算出用ホイールベース長に基づきホイールベース長を設定する。
(もっと読む)
走行装置及び走行装置の制動制御方法
【課題】平行2輪車において、二車輪を直接制動する制動手段を設ける。
【解決手段】本体1と、本体1に同軸上に取り付けられた1対の駆動ユニット2A、2Bと、乗員がつかまるT字型のハンドル3と、本体1の前後の傾き検出装置4と、ブレーキレバー5とを有する。そしてブレーキレバー5の操作情報を検出するブレーキ検出装置6が設けられる。また本体1には、駆動ユニット2A、2Bで検出された本体と車輪との相対角速度と前後傾き検出装置4で検出された角速度とから車両速度を求める車両速度検出装置7と、ブレーキ検出装置6と車両速度検出装置7との出力から目標車両速度を設定する目標速度設定装置8と、車両をその目標角度・目標角速度・目標車両速度に安定に追従するように制御する安定化制御装置9とが設けられる。さらに、駆動ユニット2A、2B内には、パウダーブレーキ10A、10Bがそれぞれ組み込まれている。
(もっと読む)
車両の電子制御システムおよびその制御方法
【課題】メインコントローラと少なくとも一つのローカルコントローラとの間に通信を行うと共に、相互間の情報を考慮して、制動装置および懸架装置を制御することにより、各コントローラの固有特性をさらに改善し、かつ、活性化させることができるのみならず、システムも単純化させることができる車両の電子制御システムおよびその制御方法を提供すること。
【解決手段】車両の情報を受信し、車両の制動制御信号および懸架制御信号を生成して出力するメインコントローラと、メインコントローラにより出力された懸架制御信号に応じて、各車輪のダンパを制御する少なくとも一つのローカルコントローラと、メインコントローラとローカルコントローラとの間のデータ通信を行うインターフェース部と、を備える。
(もっと読む)
アンチロックブレーキ制御方法及びその装置
【課題】走行状態に影響されることなく適切な推定車体速度を得て、それにより不要なアンチロックブレーキ制御の開始を回避する。
【解決手段】
車両が減速状態にあって、しかも、後輪浮きが生じている場合において、後輪12の回転速度及び回転加速度が増加状態にあると共に、後輪12の回転速度が前輪11の回転速度を所定量上回り、かつ、後輪12が非アンチロックブレーキ制御状態にあって、なおかつ、後輪浮きが検出されてから所定時間経過した際には(図3のステップS402〜S414参照)、後輪12の回転速度に代えて前輪11の回転速度に基づいて推定車体速度が算出されるため、従来と異なり、車輪回転速度と推定車体速度との差が大となって車輪にスリップが発生していると誤った判定がなされて不必要なアンチロックブレーキ制御が開始されることが確実に回避されるものとなっている。
(もっと読む)
自動二輪車用ブレーキ制御装置
【課題】後輪浮き上がりを抑制しつつ、運転者に与える空走感及びブレーキ操作の壁感を抑制することが可能な自動二輪車用ブレーキ制御装置を提供する。
【解決手段】自動二輪車用ブレーキ制御装置は、減速度モニタ値が第一の閾値以下であると判定された場合の増加勾配R1、減速度モニタ値が第一の閾値よりも大きいと判定され、かつ、車体速度モニタ値が第二の閾値よりも大きいと判定された場合の増加勾配R2、及び、減速度モニタ値が第一の閾値よりも大きいと判定され、かつ、車体速度モニタ値が第二の閾値以下であると判定された場合の増加勾配R3が、R1≧R2>R3≧0を満たすように増加勾配を設定する制動力増加勾配設定手段27Aと、増加勾配に基づいて前輪ブレーキFBの制動力を制御する制動力制御手段28と、を備えている。
(もっと読む)
フェールセーフ装置及びフェールセーフシステム
【課題】フェールセーフシステムにおいて、障害回復までの時間を短縮し、障害発生後の制御の安全性を向上させることができるようにする。
【解決手段】ブレーキ制御タスクに4輪からの車輪速を入力として与え、ブレーキ制御タスクの出力は、ABSアクチュエータ18に送出され、4輪のブレーキ制御が行われる。障害が発生した後、ブレーキ制御タスクの代替タスクの回復ステートS0では、再開ステート予測関数raと大域変数回復関数rgとを実行して、コールドスタート後の各タイムステップnで得られる車輪速xnから、障害発生後に回復すべき制御モードを予測すると共に、障害発生から回復するために必要な大域変数の値を回復する。また、再開ステート予測関数raと大域変数回復関数rgとによって回復すべき制御モードを予測し、大域変数の値を回復した後は、即座にその回復すべき制御モードに遷移する。
(もっと読む)
ブレーキ制御装置
【課題】 ABS制御時におけるマスタシリンダ圧推定を高精度に行うことが可能なブレーキ制御装置を提供する。
【解決手段】 ABS制御手段を備えたブレーキ制御装置において、ABS制御における今回の増圧サイクルにおける増圧制御量と前回の増圧サイクルにおける増圧制御量を検出するとともに、今回の増圧制御における平均増圧制御量と前回の増圧制御における平均増圧制御量を演算し、増圧制御量の今回値と前回値の差分および平均値に基づき、前記マスタシリンダの圧力を演算することとした。
(もっと読む)
ブレーキ制御装置
【課題】ABS作動等のブレーキの作動状況を適切にドライバに伝達し、ドライバの好適なブレーキ操作を可能にする。
【解決手段】ブレーキ制御装置1は、ブレーキペダルストロークSTBPに基づいて目標制動トルクTBTを設定してブレーキ駆動部14に出力する。また、ブレーキ制御装置1は、各輪に作用する各制動トルクTBfl、TBfr、TBrl、TBrrから、合計制動トルクTB4を演算し、この合計制動トルクTB4に基づいてブレーキペダル反力FBを設定する。このブレーキペダル反力FBを設定に際し、ABS13からABSの作動信号が入力された場合には、ABS非差動の場合に設定されるブレーキペダル反力FBよりも高い値に設定変更する。こうして、ブレーキ制御装置1で設定されたブレーキペダル反力FBは、ブレーキペダル反力可変駆動部15に出力される。
(もっと読む)
車両制動距離予測装置および車両制動距離予測方法
【課題】走行中の車両の制動距離について定量的に予測することができる、車両制動距離予測装置および車両制動距離予測方法を提供する。
【解決手段】車両が走行している最中の、タイヤの所定部位の時系列の加速度データを取得し、所得した前記加速度データから、タイヤの変形に基づく加速度成分を除去して、タイヤの変形に基づく加速度成分が除去された、変形成分除去後加速度データを周波数分析して周波数スペクトルを求め、周波数スペクトルの積算値を求めるとともに、求めた前記積算値に基づいて、制動距離を予測するための制動距離パラメータを算出し、算出された前記制動距離パラメータに基づいて、車両の制動距離の予測値を求める。
(もっと読む)
車両のアンチロック制御装置
【課題】 アンチロック制御において車輪ブレーキに供給する液圧を制御するための基準液圧に的確に設定する。
【解決手段】 車両のアンチロック制御装置は、車輪の接地荷重を検出あるいは推定する接地荷重算出部M3と、路面摩擦係数を検出あるいは推定する路面摩擦係数算出部M5と、車輪の接地荷重および路面摩擦係数に基づいてアンチロック制御の上側基準液圧および下側基準液圧を算出する基準液圧算出部M6とを備え、下側基準液圧がアンチロック制御における液圧の下限値として決定され、上側基準液圧がアンチロック制御における液圧の上限値として決定される。前記基準液圧を車輪の接地荷重および路面摩擦係数に基づいて算出するので、アンチロック制御中の液圧の変動量を小さく抑えて制動効果の向上および制動フィーリングの向上を図ることができる。
(もっと読む)
車両のアンチロック制御装置
【課題】 アンチロック制御において使用する路面摩擦係数を的確に推定することで、アンチロック制御の精度を向上させる。
【解決手段】 制動力算出部M4で算出した制動力と、車輪加速度算出部M2で算出した車輪加速度と、接地荷重算出部M3で算出した車輪の接地荷重とに基づいて、路面摩擦係数推定部M5aが路面摩擦係数を推定する。スリップ率算出部M1cが、車輪速度および車体速度に基づいて算出したスリップ率が増加中でかつ所定値よりも小さいときに、路面摩擦係数更新部M5bが前記路面摩擦係数を更新する。基準液圧算出部M6で算出した基準液圧に基づいてアンチロック制御を精度良く行ってスリップ率を狭い範囲に安定させ、この安定したスリップ率によって路面摩擦係数の更新時期を判定することで、路面摩擦係数のピークを的確に把握してより精度の高いアンチロック制御を行うことができる。
(もっと読む)
車両の制動力保持装置、及び車両の制動力保持方法
【課題】ヒルホールド制御に基づき各車輪がロックした状態での車両の予期せぬ移動に基づき車両が偏向した場合に、その車両の偏向の補正をアシストすることができる車両の制動力保持装置及び車両の制動力保持方法を提供する。
【解決手段】CPUは、ヒルホールド制御の実行中に検出した車両の車体加速度DVSが「0(零)」以上であると共に、車両のヨーレイトYRが閾値KYR以上であった場合、車両が偏向しているものと判断する。そして、CPUは、各車輪に付与されている各ホイールシリンダからの制動力を低下させる。すると、各車輪のロック状態が解除され、転舵輪である前輪の転舵による車両の偏向の補正が可能となる。
(もっと読む)
付随車ブレーキ受量器
【課題】滑走および再粘着検知遅れ・空気ブレーキの応答遅れから、付随車の滑走再粘着制御は、乗り心地が悪く、また粘着力の利用率の低い状態が改善できていない。
【解決手段】付随車車輪の接線力係数を外乱オブザーバにより常時推定し、滑走検知時の推定接線力係数をもとに、再粘着させるための必要最小限のブレーキトルク引き下げ量と再粘着後に指令するブレーキトルクを滑走検知時の接線力係数対応ブレーキトルクより僅かに小さなトルクとなるように演算し、このブレーキトルク引き下げ量と再粘着後に指令するブレーキトルクから、吐き出し弁と供給停止弁の滑走検知時点以降のオン・オフさせるタイミング設定値を演算し、滑走検知時点以降付随車軸加速度を参照することなく、予測制御によりこのタイミング設定値に基づいて吐き出し弁と供給停止弁をオン・オフさせるようにして、ブレーキトルクの低減量および滑走速度が過大となることを抑制する。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】走行中の車両にアンチロックブレーキ制御が実行された場合に、車両が走行する路面状態によらず、車両における制動力の低下を抑制すると共に、車両における走行の安定性を確保することができる車両制動制御装置及び車両の制動制御方法を提供する。
【解決手段】CPUは、左右の車輪のうち何れか一方の車輪に対してのみアンチロックブレーキ制御が実行されている場合、車両が左右異μ路を走行していると判定する。そして、CPUは、車両安定性制御の実行を禁止する。一方、CPUは、左右の車輪にそれぞれアンチロックブレーキ制御が実行されている場合、及び左右の車輪の何れに対してもアンチロックブレーキ制御が実行されていない場合、車両安定性制御の実行を許可する。
(もっと読む)
アンチロックブレーキシステム制御装置
【課題】 車輪のスリップ状態によらず、車輪速から車速を予測して、ABSによる適切な制御を実現することのできるアンチロックブレーキシステム制御装置を提供すること。
【解決手段】ABS制御装置は、車輪の回転速度を検出する回転速度検出手段13FL、13FR、13RL、13RRと、検出された回転速度に基づいて、車速を演算する車速演算手段44と、演算された車速に基づいて制動制御を行う制動制御手段45とを備え、車速演算手段44は、回転速度信号から車輪の回転速度の微分値dω/dtを算出する回転速度微分値算出部441と、算出された微分値から減速度dV/dtを算出する減速度算出部442と、算出された減速度に基づいて車速を予測する車速予測部443とを備えている。
(もっと読む)
1 - 20 / 52
[ Back to top ]