
Fターム[3D046HH57]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 天候 (20)
Fターム[3D046HH57]に分類される特許
1 - 20 / 20
車両用走行支援装置及び車両用走行支援方法
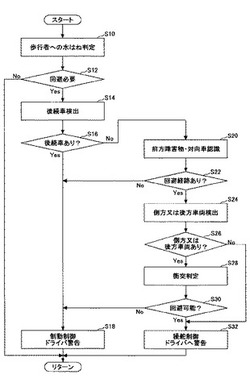
【課題】本発明は、自車両の周辺車両に応じた適切な走行支援を行うことができる、車両用走行支援装置及び車両用走行支援方法の提供を目的とする。
【解決手段】自車両の進行方向に水溜りが検出された場合において、自車両の後続車両が検出されるときには、後続車両を減速させるため、自車両を制動制御する。自車両の進行方向に水溜りが検出された場合において、自車両の後続車両が検出されないときには、前方の障害物や対向車を回避する経路があって、側方又は後方の周辺車両に衝突するおそれがない場合には、自車両を操舵制御し、回避経路がなく又は周辺車両に衝突するおそれがある場合には、自車両を制動制御する。
(もっと読む)
電動ディスクブレーキ装置

【課題】錆を早期に除去することで、ディスクに生じる肉厚変動を抑制でき、ジャダーの発生を抑制できる電動ディスクブレーキ装置の提供。
【解決手段】車輪とともに回転するディスク11にブレーキパッド14,15を押圧する推力機構13,40と推力機構13,40を駆動する電動モータ19とを内包する電動キャリパ10と、電動モータ19をブレーキペダルの操作に基づいて制御する制御手段とを有し、制御手段は、車輪の回転中にブレーキペダルの操作に関係なく電動モータ19により推力機構13,40を介してディスク11にブレーキパッド14,15を接触させて錆を落とす錆落とし制御を行う。
(もっと読む)
駐車判定装置
【課題】自動車部品に水分が付着した状態での駐車が行なわれる直前を判定することができる駐車判定装置を提供する。
【解決手段】自動車部品に水分が付着していると判定され、かつ、車両が駐車する直前であると判定されたときに、自動車部品に水分が付着した状態での駐車が行なわれる直前であると判定する。
(もっと読む)
車両用運転支援装置
【課題】必要なときだけ確実に運転支援を行う。
【解決手段】車両の現在位置、車両前方のカーブ情報および現在の車両状態に基づいて車両前方カーブ通過時の車両状態を推定する(1a)とともに、記憶されている過去のカーブ通過時の車両状態に基づいて運転者のカーブ通過時の許容車両状態を推定し(1b)、車両前方カーブ通過時の推定車両状態と運転者のカーブ通過時の許容車両状態とに基づいてカーブにおける運転支援を行うか否かを判定する(1c、1d)。
(もっと読む)
車両の運転支援装置
【課題】制御開始時以外であっても、また、制動する制御対象が移動する先行車であっても、レスポンス良く且つ円滑に制動制御が行われ、自然な感覚でドライバが利用することが可能となる。
【解決手段】自動追従制御プログラムは、現在の先行車の減速度afと速度Vfが属する領域の自車目標減速度演算式を選択し、この選択した自車目標減速度演算式により自車目標減速度aを演算する。そして、更に、この自車目標減速度aに対し、常時、自車目標減速度aの時間的変化量(時間微分値:傾き)を予め設定する第1の範囲内に制限し、且つ、自車目標減速度aの時間的変化量の更なる時間的変化量(2階時間微分値:傾きの時間変化量)を予め設定する第2の範囲内に制限する補正を行って出力し、自動ブレーキ制御(停止制御も含む)や自動加速制御(追従発進制御も含む)を行う。
(もっと読む)
編成列車のブレーキ制御方法
【課題】先頭車両に続く車両の車輪の摩耗を低減させる。
【解決手段】複数の車両1〜4を連結した編成列車5でブレーキ指令信号により指令されたブレーキ力を各車両1〜4の重量に対応した応荷重信号に基づいて車両1〜4毎に負担するブレーキ力を演算する編成列車のブレーキ制御方法において、雨天時を意味する雨天信号が入力された場合に先頭車両1の応荷重信号を0より大きく1より小さい所定の軽減係数を乗じた値として各車両1〜4毎に負担するブレーキ力を演算するようにしたものである。
(もっと読む)
車両制御装置
【課題】実際の天候に応じてスリップや横滑りあるいは車輪回転ロックの発生を予防できるようにする。
【解決手段】制御装置5は、車両のスリップなどの異常挙動が検出されて対応制御動作を行なうと、その時点での車両制御状況を補正データとして取得し、さらに、道路状況データ及び天候情報を取得し、当該動作時点での走行地点を走行注意地点として外部メモリ11に記憶する。そして、走行注意地点での前記補正データに基づき当該走行注意地点での最適な車両制御モードを道路状況及び天候情報に応じて割出し、車両が前記走行注意地点に進入するときもしくは進入が予測されるときに、現時点での前記天候情報に応じた前記車両制御モードを設定し、適宜、実際の天候に合った車両走行状態制御を行なう。
(もっと読む)
車両挙動推定予測装置および車両安定化制御システム
【課題】複数の車両挙動を表す量をその特徴を反映させながら次元圧縮することで、ニューラルネットワークへの入力数の低減し、精度良く車両挙動を表す量を推定し予測することが可能な車両挙動推定予測装置およびそれを用いた車両安定化制御システムを提供する。
【解決手段】車両挙動推定予測装置1は、測定装置Sにより測定された複数の車両挙動を表す量に関するデータを砂時計型ニューラルネットワークinSNNを用いて次元圧縮させ砂時計型ニューラルネットワークinSNNの圧縮層L3からの出力を特徴量f1として抽出する特徴量抽出手段2と、抽出された特徴量f1に基づいて現在の車両挙動を表す量の推定値または一定時間後の車両挙動を表す量の予測値を出力するニューラルネットワークRNNで構成された演算手段3とを備える。
(もっと読む)
車両用ブレーキ装置
【課題】ポンプの異常を診断する際に、流路の開閉を行うバルブの作動回数を可及的に低減させて、耐久性の低下を抑制する。
【解決手段】リザーバタンク2a及びホイールシリンダ3FR(3FL)間を連通した流路に介装され、正方向及び逆方向に回転駆動可能なギアポンプ5s(5p)と、ギアポンプ5s(5p)及びホイールシリンダ5FR(5FL)間の流路を閉鎖可能なインレットバルブ6FR(6FL)とを備え、運転者のブレーキ操作がない間に、ギアポンプ5s・5pを所定の要領で逆方向に回転駆動し(ステップS2)、そのときにポンプモータが回転するか否かによってギアポンプ5s・5pの異常を診断する(ステップS3〜S5)。
(もっと読む)
車両制動装置
【課題】 車両の製造コストの増大を抑えつつ、車両の制動力を向上した車両制動装置を得る。
【解決手段】 ホイールモータ14を支持する車体との間に、タイヤ16のキャンバ角θを変更する為のキャンバ角操作機構20が更に配置される。キャンバ角操作機構20は、車両12の4つのタイヤ16に対応してそれぞれ配置される。4つのタイヤ16のキャンバ角θを一斉に大きくするのに伴い車体が低下して、車体の下面が路面Rに近づくことになる。車両12の下部とされるホイールモータ14の下側部分には、ゴム製で下面が平面状に形成された平面状ブレーキ部材及び、金属製で下面が爪状に形成された爪状ブレーキ部材が配置される。車両12の状態を検出するための状況検出装置30が車両12に搭載される。
(もっと読む)
ブレーキパッド温度が個別に把握される車輌
【課題】アンチロックブレーキシステム(ABS)や走行安定化制御装置(VSC)を備え、複数の車輪が個別に滑り制御される車輌に於いて、各車輪のブレーキパッドの温度を的確に把握し、いずれの車輪に於いてもブレーキパッド温度の過度の上昇が生じないようにする。
【解決手段】ブレーキパッドにより摩擦制動される複数の車輪を備えた車輌に於いて、車輌のブレーキペダル踏込み状態を含む走行状態に基づいて各車輪のブレーキパッドの温度を個別に把握する。
(もっと読む)
タイヤ摩耗状態判定装置
【課題】容易な構成で、高精度の摩耗判定ができるタイヤ摩耗状態判定装置を提供する。
【解決手段】タイヤ摩耗状態判定装置の判定部は、回転するタイヤ14が接地するときに、タイヤ周方向に発生する実加速度を加速度センサ18を取得する。また、記憶部から非摩耗状態のタイヤが接地するときに、タイヤ周方向に発生する基準加速度に対して設定された摩耗判定の基準となる摩耗発生閾値を取得する。検出した実加速度と摩耗発生閾値を少なくとも加速度の出力値の大きさまたは出力値の変化勾配または加速度増加時のピーク間隔のいずれか1つに基づいて比較し、タイヤの摩耗状態を判定する。
(もっと読む)
走行支援システム
【課題】現在の走行支援システムは状況により、ドライバにとって最適な制御になっていない場合があり、たとえば圧雪路面でのABSのように危険を伴う制御となる場合もある。
【解決手段】車両の走行を支援手段により支援するものであって、乗員により天候状態が入力される複数の天候状態入力手段と、天候状態を検出する天候状態検出センサと、前記天候状態入力手段への入力結果、もしくは前記天候状態検出センサの出力結果のいずれかに基づき支援モードを決定するモード決定手段と、前記乗員により入力操作される悪天候モード入力手段と、を備え、前記モード決定手段は、前記悪天候モード入力手段への入力の存在時には前記天候状態検出センサの出力に基づき支援モードの決定を行い、前記悪天候モード入力手段への非入力状態では、前記天候状態入力手段の入力結果に基づき支援モードの決定を行い、前記支援モードに基づき前記支援手段が支援を実施する。
(もっと読む)
車両用走行支援装置
【課題】 自車が水溜りを通過する際に水を跳ね上げて物体にかけない適切な走行支援制御を行う車両用走行支援装置を提供する。
【解決手段】走行支援制御ECUは、物体検出手段(ステップ102)が自車Maの進行方向の物体(歩行者Ba)を検出し、雨天検出手段(ステップ204)が雨天であるか否かを検出し、この雨天検出手段(ステップ204)が雨天であることを検出したときに、安全距離設定手段(ステップ110,112)が安全距離ΔKLを長く設定し、危険予測手段(ステップ104〜108,114)が物体検出手段により検出した物体と自車Maとの最接近時に安全距離ΔKLが確保されるか否かを予測し、走行支援制御手段(ステップ118)が、危険予測手段が物体と自車Maとの最接近時に安全距離ΔKLが確保されないと予測したときに走行支援制御を行う。
(もっと読む)
自動走行制御装置
【課題】 操縦者のブレーキ操作から反射的なものを排除し、もって、不必要な制御解除を回避すること。
【解決手段】 操縦者のブレーキ操作状態を検出する。先行車両のブレーキランプの点灯を検出する。先行車両のブレーキランプの点灯検出時点から前記ブレーキ操作状態が予め設定された厳格化要件を満たした場合にオートクルーズコントロール手段の制御解除を決定する。操縦者が内的または外的な理由で反射的にブレーキを操作した場合には、そのブレーキ操作状態から意識的な操作ではないと判断できる。そのためオートクルーズコントロールを維持することができ、不要な制御解除やそれに伴うリジューム操作を回避できる。
(もっと読む)
運転支援装置
【課題】歩行者との事故発生の危険度を総合的に判定し、危険度に適応した回避行動を支援すること。
【解決手段】自車カメラ31によって撮影した車両周辺の画像や、路車間通信装置35、車両間通信装置36が受信した画像に対して画像処理部11による画像処理を施した後、画像認識部12が歩行者の有無を認識する。その結果、歩行者が存在するならば危険度算出部13がナビゲーション装置20、速度センサ32、レーダ33、雨滴センサ34などの出力を用いて歩行者と自車両とが接触する可能性(危険度)を算出し、車両動作制御部14はエンジン制御装置61、ブレーキ制御装置62、変速制御装置63、ステアリング制御装置64、乗員用エアバッグ65および歩行者用エアバッグ66を制御して危険度に対応した車両動作の支援を実行する。
(もっと読む)
ブレーキディスクの錆除去システム
【課題】ブレーキディスクの錆除去システムにおいて、錆の発生認識やそれに伴う錆除去制御の改良を行う。
【解決手段】ブレーキディスクの錆除去システムのECU18は、条件認識部24において、仮にブレーキディスク16aに錆が発生する条件が整ってしまったと判断した場合でも、回避判断部34において錆発生を回避することができると判断した場合には、錆除去処理を禁止し、車両10が走行を再開したときに、不要な錆除去制御を防止する。
(もっと読む)
衝突予測方法及び衝突予測装置
【課題】自車の走行環境や走行状態の複数個の要因に基く衝突可能性の判定精度の低化を考慮して衝突可能性を予測し、実際の走行環境下においても衝突可能性の予測ミスが極力発生しないようにする。
【解決手段】レーダ装置2の自車前方の探査及び自車1の走行状態の検出監視に基いて自車前方の先行車等の障害物と自車1との衝突可能性を判定し、自車1の走行環境、走行状態に関連する複数個の走行指標毎に設定された衝突可能性の判定結果の信頼度特性から、各走行指標の現在値それぞれに基く衝突可能性の判定結果の個別信頼度を算出し、各個別信頼度を統合して前記判定結果の統合信頼度を決定し、統合信頼度にしたがって判定結果を補正し、補正後の判定結果から障害物と自車1との衝突可能性を予測する。
(もっと読む)
車両制御装置
【課題】対向車線に進入準備状態にある車両において後突を受ける予知が行われた場合、後突時の自車の対向車線への飛び出しを効果的に抑制することのできる車両制御装置を提供する。
【解決手段】ECU42は、後方センサ60を介して衝突予知部58が後続の車両が自車である車両10に後突する可能性があると予知したことと、態勢検出部56を介して車両10が右折のために対向車線に進入する準備態勢を取っていることを確認した場合、ステアリング装置22を制御し、前輪12a,12bの方向を非対向車線側に自動的に変更する。また、ECU42はマスタシリンダ18を介してアクチュエータ20a〜20dを制御し、前輪12a,12b、後輪14a,14bの制動力を制御する。
(もっと読む)
車両用走行制御装置
【課題】自車走行車線に隣接する車線の交通量に応じて、運転者に違和感のない走行制御を行う。
【解決手段】自車前方を走行する先行車両に追従走行する追従走行制御中に、自車走行車線に隣接する車線の車両状態に基づいて隣接車線の混雑状態を検出し、隣接車線が混雑状態にあると判断されたときには、運転者に対してそれを報知すると共に、前記追従走行制御での加速制御における加速度及び速度の少なくとも一方を制限する。
(もっと読む)
1 - 20 / 20
[ Back to top ]