
Fターム[3D052FF05]の内容
非転向輪、付随車の操向、その他の操向 (4,525) | 駆動形態 (505) | 全車輪駆動 (37)
Fターム[3D052FF05]に分類される特許
1 - 20 / 37
作業機
作業車両
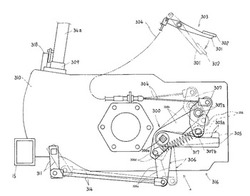
【課題】旋回に連動して切状態となる旋回内側のサイドクラッチの切状態の解除操作機構をコンパクトに構成し、広い取付スペースを必要としない作業車両を提供する。
【解決手段】走行車体に走行装置を設け、走行装置への駆動力を入切する切替伝動装置300を入切操作する操作部材305を設け、走行車体を操向操作する操舵部材を旋回操作すると切替伝動装置300を操作部材305を介して切操作する旋回連動機構Aを設けた作業車両において、旋回連動機構Aと操作部材305の間に旋回連動状態を解除する解除操作部材307を設けると共に、この解除操作部材307を旋回連動状態と連動解除状態に切り替える解除切替部材303を設けて構成する。
(もっと読む)
乗用型作業機

【課題】乗用型作業機の旋回時の走行速度を自動的に減速するための構成を簡略化すること。
【解決手段】ステアリングハンドル31と、エンジン11と、該エンジン11の動力を走行用の駆動輪14,14に伝達する油圧式無段変速機62と、該油圧式無段変速機62を変速操作をするようにスイング動作が可能な操作レバー71と、を備えた乗用型作業機10である。操作レバー71のスイング基部71aには、戻し機構90が設けられている。該戻し機構90は、操作レバー71によって変速操作されている油圧式無段変速機62の変速状態を、ステアリングハンドル31による旋回操舵時に減速する方向に戻す。
(もっと読む)
作業車両
【課題】
旋回時に駆動力の切れる走行装置に駆動力を供給する状態とする操作装置を設け、旋回時の走行が停滞することのない作業車両を提供する。
【解決手段】
走行装置11,11と伝動切替装置300を走行斜体2に左右一対設け、走行車体2を左右方向に旋回操作する操作部材34を設け、操作部材34の操作に連動して旋回内側の伝動切替装置300を「切」側に作動させる旋回連動機構307を設け、旋回連動機構307と切替部材305を連結する連動操作機構317を設け、伝動操作部材303を設け、伝動操作部材303と切替部材305を連繋操作部材304で連結して構成する。
(もっと読む)
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
作業車両
【課題】土質の柔らかい圃場での旋回走行が円滑に行える作業車両を提供すること。
【解決手段】前輪3と後輪4を有する機体2と、前輪へのデファレンシャル機構を切り替えるデフロック機構170と、デフロック機構170を制御するデフロック制御機構200aと、後輪の上下位置を変更するための圧縮スプリングと後輪伝動ケース111と回動軸部112等とを備えた苗移植装置1であって、圧縮スプリング及び後輪伝動ケース111等を作動させる後輪車高調整用シリンダーモーター110と、デフロック機構170の作動を検出する前輪デフロックペダル操作検出スイッチ150と、そのスイッチ150が前記作動を検出した場合、後輪車高調整用シリンダーモーター110を作動させて機体2の車高を変更する車高変更制御機構200bとを備えた作業車両である。
(もっと読む)
乗用型田植機
【課題】植付部が自動的に昇降する際の安全性を向上させた乗用型田植機を提供する。
【解決手段】乗用型田植機は、車体と、報知部と、植付部と、植付部を上下に昇降するための昇降シリンダと、昇降シリンダの駆動を制御する制御部と、を備える。そして、前記制御部は、植付部を自動的に昇降させる制御を開始するトリガを検出した場合、前記報知部によって植付部の自動昇降を報知した後、昇降シリンダを駆動して植付部を昇降させる。
(もっと読む)
乗用型田植機
【課題】 本発明の課題は、旋回時の苗植え付けなどの諸作動を自動的に行わせることができるようにすることである。
【解決手段】 機体上に設けたエンジンと、機体の進行方向に向かって左右に設けた左右前輪及び左右後輪と、該左右前輪を操向操作する操向操作具と、左右後輪のそれぞれの伝動軸に設けたエンジン駆動力を伝達・非伝達するクラッチと、操向操作具に連動して前記左右いずれかのクラッチを作動させる連動ロッド(180,180)とを備えた走行車両を設け、該走行車両には昇降用リンク装置を介して苗植付装置を装着した乗用型田植機において、操向操作具による操向角度の検出により旋回中であると判断すると、後輪の伝動軸の回転数を検出し、該回転数が第一の設定値を超えると苗植付装置を下降し、前記回転数が第二の設定値を超えると苗植付装置を作動させる制御装置を設けた。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】少なくとも2つの操舵可能輪と相互に独立に駆動される少なくとも2つの駆動輪とを有する車両において、狭い駐車スペースへも僅かな操車の手間で駐車を行えるようにする。
【解決手段】縦列駐車の駐車スペース3への入庫過程を容易にするために、車両1は相互に独立に駆動される少なくとも2つの駆動輪11を有する。駆動機構として例えばハブモータ13が用いられる。駆動輪11は、ここでは、対向する2つの車輪すなわち1個の軸の両側の車輪であって、カーブ走行の際に一方が内円を走行し他方が外円を走行する。車両1のカーブ走行および操車走行を容易にするために、車両1はさらに少なくとも2つの操舵可能輪を有している。この実施例では、操舵可能輪は操舵可能軸15に取り付けられた車輪である。操舵可能軸15により操舵可能輪17の方向を相応に変更することにより、車輪を運動させ、操舵過程ないし車両の旋回走行が開始される。
(もっと読む)
乗用移植機
【課題】差動装置による差動を規制することのできる乗用移植機において、様々な走行状態に適用可能で、効率的な作業走行及び路上走行を行うことができる汎用性の高い乗用移植機を提供する。
【解決手段】左右一対の前後輪と、異なる速度で動力を分配伝動させる差動状態で左右の前輪に動力を分配伝動可能な差動装置と、ステアリング作動に連動して旋回内側のサイドクラッチを切断作動させる連係機構とを備え、差動装置の差動状態を制動力によって規制する規制機構42を設けた乗用移植機において、上記制動力を発生させずに差動状態を規制しない路上走行用状態と、差動装置がデフロックされるように上記制動力を発生させるデフロック状態と、デフロック時よりも小さい制動力を発生させて差動状態を規制する作業走行用状態との少なくとも3つの状態に切換可能に前記規制機構42を構成した。
(もっと読む)
車両
【課題】簡易な操作により、超信地旋回を行うことが可能な車両を提供する。
【解決手段】2つの前輪(左前輪21及び右前輪31)と、前記前輪にそれぞれ連結され、前記前輪を操舵する操舵用アクチュエータ(左前輪操舵モータ23及び右前輪操舵モータ33)と、前記操舵用アクチュエータの動作を指示するステアリングホイール62と、ステアリングホイール62の回動角θに基づいて定められる旋回中心Z周りを旋回することが可能な前記前輪の操舵角(δFL及びδFR)をそれぞれ算出し、前記前輪の操舵角が算出された操舵角となるように前記操舵用アクチュエータを動作させるコントローラ100と、を具備した。
(もっと読む)
移植機
【課題】組み立てを簡略化し、組立性の向上を図る。
【解決手段】デフロック機構を操作するデフロックペダル34と、デフロックペダル34によるデフロック機構の操作荷重を調節するデフロック操作荷重調節部38と、各サイドクラッチ13のシフタアーム14をデフロックペダル34に連繋させ、ステアリングハンドル16の旋回操作に応じたサイドクラッチ13の切り作動を、デフロックペダル34の操作に応じて解除する左右の解除リンク33と、デフロックペダル34の操作に応じた解除リンク33の解除タイミングを調節する解除タイミング調節部44とを備え、デフロックペダル34、デフロック操作荷重調節部38及び解除タイミング調節部44を、予めベース部材47に組み付け、前側伝動ケースの後面部に一体的に取付可能とした。
(もっと読む)
作業機
【課題】安価で制御性に優れる無段変速機構を備えた作業機を提供する。
【解決手段】田植機1は、エンジン2と、電動モータ22と、HST35と、2つの後車輪21と、差動装置23と、制御部と、を備える。HST35は、エンジン2の出力を変速する。差動装置23は、HST35の出力と電動モータ22の出力との差動動力を後車輪21に出力する。制御部は、電動モータ22の回転速度を制御する。また、エンジン2の出力は略一定とされる。そして、制御部は、HST35の駆動力を打ち消す方向にのみ前記電動モータ22を回転駆動する。
(もっと読む)
作業車両
【課題】各種機構を設け操作性を向上させる一方で各種連動を規制又は解除可能に構成して種々の状況に対応できるようにするとともに、操作具を減らして製造コストを低く抑えた作業車両を提供する。
【解決手段】走行部を制動させるブレーキ機構の入作動に連動して主クラッチ機構を切作動させて動力遮断状態とする一方でブレーキ機構の切作動に連動して主クラッチ機構を入作動させるクラッチ・ブレーキ連動機構46と、主クラッチ機構及びブレーキ機構の入切操作を行う単一の入切ペダル16と、操向連動機構54によるサイドクラッチの操向操作との連動を規制する規制機構49と、規制機構49を介してサイドクラッチの操向作動との連動を規制する規制操作を行う操作具51と、該操作具51の上記規制操作によって入切ペダル16によるブレーキ機構の入作動時に主クラッチ機構を入作動させることが可能な入作動機構47とを備えている。
(もっと読む)
トラクタ
【課題】 作物の残幹が残っている畝を跨いでトラクタを走行させる際に、該残幹によってタイロッドのブーツを損傷させるのを防止する。
【解決手段】 トラクタ車体8の下部側であって且つ該車体8の前方側に、後部側が上下方向の軸芯Y回りに回動自在に支持されていて前部側が左右揺動するピットマンアーム36が設けられ、このピットマンアーム36の前部側に、該ピットマンアーム36の前記軸芯Y回りの左右揺動動作によって前輪14を操向操作するタイロッド45が連結されたトラクタにおいて、タイロッド45のピットマンアーム36との連結部分の前面側及び下面側を覆うカバー部65を備え且つピットマンアーム36と同行揺動するように該ピットマンアーム36に取り付けられた保護カバー62を設ける。
(もっと読む)
作業車輌の前輪操向装置
【課題】配置するスイッチを少ない個数とするものでありながら、操舵方向及び複数段階の操舵角を検出することが可能な作業車輌の前輪操向装置を提供する。
【解決手段】前輪操向装置20は、大径部45a,45c,45f及び小径部45b,45d,45e,45gを有する軸状カム部材45と、該軸状カム部材45が貫通配置された位置検出シリンダ43と、該位置検出シリンダ43に固定された左検出スイッチ41及び右検出スイッチ42とからなる操舵位置検出装置40を備えて構成されている。軸状カム部材45は、操向操作に基づいて移動し、中立状態から最大操舵角となるまでの間に、操舵角に応じた複数回の状態変化を出力させることができ、操舵方向及び複数段階の操舵角を検出することができる。
(もっと読む)
移植機
【課題】サイドクラッチ連動機構を備えるものにおいて、旋回中の機体走行停止操作時に、対地制動力が弱くなったり、制動力の左右バランスが崩れて機体に左右ぶれが発生する不都合を解消する。
【解決手段】ステアリング機構28の操舵角が所定角度を超えたことに連動して旋回内側のサイドクラッチ23L、23Rを自動的に切るサイドクラッチ連動機構29と、クラッチ・ブレーキペダル47の操作に応じて、走行動力伝動経路に介設されるメインクラッチ9を切り、かつ、走行動力伝動経路に介設される単一のブレーキ20を作動させて機体走行を停止させる機体走行停止操作機構48とを備える乗用田植機1であって、クラッチ・ブレーキペダル47が操作されたとき、ステアリング機構28とサイドクラッチ23L、23Rとの連動を阻止するサイドクラッチ連動阻止機構51を設ける。
(もっと読む)
走行車両
【課題】多条植えの乗用型作業機が、たとえ湿田走行中であっても、前進の場合は所望の走行経路で旋回が可能となるとともに、後進の場合については、安定して後進旋回することができる走行車両を提供する。
【解決手段】走行車両は、走行車体(2)と、旋回内側の走行推進体(11)の駆動を断続的に入/切する旋回連動機構(A)と、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を旋回連動機構(A)により断続的に入/切する周期を変更する制御装置(163)を備えて構成され、上記走行車体(2)には、その前後進の方向を検出する前後進検出手段(90)を設け、この前後進検出手段(90)の後進検出信号を条件として上記制御装置(163)により、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を連続的に入として制御するものである。
(もっと読む)
車両及び車両の走行方向の変更方法
【課題】 小スペースで旋回することができる車両を提供する。
【解決手段】 少なくとも左右に一対配置される複数の車輪21,22と、走行すべく車輪21,22を回転させるための一つの駆動手段31とを備える車両において、車輪21,22間に回転速度差が発生することにより走行方向を変更すべく、少なくとも左右一対の車輪21,22を制動可能で、且つ当該各車輪21,22の回転速度を個別に調整可能に構成される方向変更手段4を備えることを特徴とする。
(もっと読む)
移動ロボットの旋回制御方法
【課題】軽量小型の移動ロボットを旋回させるに際して、旋回し得ない状況に陥ったとしても、駆動用モータの焼き付きを阻止可能な移動ロボットの旋回制御方法を提供する。
【解決手段】車体2の前後左右に配置した四個の車輪3と、車輪3を個々に駆動する駆動用モータ4と、駆動用モータ4を個々に制御するモータコントローラ5と、遠隔操縦装置A又は自律制御装置Bからの動作指令に基づいて車輪3の各旋回速度を算出してモータコントローラ5に速度指令を与える制御回路10を備えた移動ロボット1を旋回させるに際して、遠隔操縦装置A又は自律制御装置Bから出された超信地旋回指令が終了した時点において、制御回路10では、モータコントローラ5に対してサーボオフ指令を出力して駆動用モータ4の過電流状態を解除した後、次の指令信号周期においてモータコントローラ5に対してサーボオン指令を出力して駆動用モータ4に電流を印加する。
(もっと読む)
1 - 20 / 37
[ Back to top ]