
Fターム[3D052HH03]の内容
非転向輪、付随車の操向、その他の操向 (4,525) | 操作伝達手段 (455) | 電気 (154)
Fターム[3D052HH03]に分類される特許
1 - 20 / 154
作業機
クローラ式車両
【課題】路面状況等に拘らず、作業者が意図する方向に向けて走行させることが可能な高所作業車を提供する。
【解決手段】高所作業車は、クローラ装置の走行作動を操作するための操作レバー51と、操作レバーの傾倒方向および傾倒量を検出するX軸検出器およびY軸検出器と、クローラ装置の走行作動を制御するコントロールユニットとを備え、操作レバーの中立位置から前方への傾倒操作領域が、低速前進領域F1および高速前進領域F2からなり、コントロールユニットは、操作レバーが高速前進領域F2にある状態から右方に傾倒操作されたときには、左クローラ装置を操作レバーの前後への傾倒量に対応した回転速度で正転させ、右クローラ装置を、左クローラ装置の回転速度よりも所定出力だけ低く設定された回転速度を操作レバーの右方への傾倒量に対応させて低下させて設定された低下回転速度で、左クローラ装置と同一方向に回転させる。
(もっと読む)
自走車両

【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
作業車
【課題】走行状態指令手段の指令情報に基づいて、定格領域を越えるような出力制限領域にて制御指令用速度及び制御指令用駆動トルクが指令された場合であっても、操作者が意図した旋回走行が行うことが可能となる作業車を提供する。
【解決手段】左右の走行装置を夫々独立に走行駆動する一対の電動モータ11R,11Lの作動を制御する制御手段23が、各電動モータ11R,11Lについて求めた目標速度と各電動モータ11R,11Lの回転速度とに基づいて求めた制御指令用速度及び制御指令用駆動トルクが出力制限領域にあるときは、走行状態指令手段にて指令されている車体の旋回状態に対応する速度差を維持し、且つ、定格領域に戻るように、制御指令用速度及び制御指令用駆動トルクを補正する。
(もっと読む)
移動装置
【課題】搭乗者が左操作または右操作を加えると移動方向を変える移動装置の操作を簡単化したい。搭乗者が右左折を意図して操作したのか、車線変更を意図して操作したのかが判別できないと操作を簡単化できない。
【解決手段】移動装置の位置を特定する位置特定装置と、移動装置が移動可能な経路網に存在する分岐点群の位置情報を示す分岐点群の位置情報DBと、角速度指示値の計算装置を備えている。計算装置は、操作部が左操作された時の移動装置の位置から次の分岐点までの距離が所定値以下であれば当該分岐点で左折する角速度指示値を計算し、操作部が左操作された時の上記距離が所定値以上であれば左側へ車線変更する角速度指示値を計算し、操作部が右操作された時の上記距離が所定値以下であれば当該分岐点で右折する角速度指示値を計算し、操作部が右操作された時の上記距離が所定値以上であれば右側へ車線変更する角速度指示値を計算する。
(もっと読む)
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
乗用作業車
【課題】車体の走行に伴って車体周囲の作業対象物に対する作業を行う電動式作業デバイスの電力消費を抑制する制御を実装された乗用作業車の提供。
【解決手段】乗用作業車は、運転座席を備えた車体と、当該車体を支持する駆動車輪ユニットと、作業デバイスを有する作業ユニットを駆動するための作業用電動機と、作業用電動機を定常モード又は当該定常モードより消費電力が少ない省電力モードで動作制御する電動機制御部と、作業用電動機の負荷を評価する作業負荷評価部とを備えている。作業負荷評価部によって評価された作業用電動機の負荷がしきい値より低い低負荷である場合に、電動機制御部は作業用電動機を省電力モードで動作させる。
(もっと読む)
作業車
【課題】左右の走行車輪を一対の電動モータにて夫々独立に走行駆動し且つ夫々独立で左右の走行車輪に対する変速操作を行うようにしながらも、走行安定性を向上することが可能な作業車を提供する。
【解決手段】直進並びに旋回走行を現出可能な状態で左右の走行車輪2,2を夫々独立に走行駆動する一対の電動モータ11R,11Lと、夫々独立で左右の走行車輪2,2に対する変速操作を行う左右一対の変速操作具12R,12Lと、作動を制御する制御手段23とが備えられ、制御手段23が、変速操作具12R,12Lの操作位置が左右で異なるときは、各電動モータ11R,11Lの夫々に対する目標速度を、それらの速度差が各変速操作具12R,12Lの操作位置の差に対応する速度差よりも設定量だけ小さくなる状態で設定して各電動モータ11R,11Lの作動を制御する。
(もっと読む)
作業車両
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記旋回量微調節手段の操作量に対応させて変更可能に構成した。旋回量微調節手段による走行機体の旋回量の調節量は、旋回量微調節手段の操作量に対応させて変更可能に構成しているため、オペレータは、旋回量微調節手段の操作量を変更することで、簡単に旋回量微調節手段による走行機体の旋回量の調節量を変更することができる。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記走行機体の速度に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、旋回量微調節手段による走行機体の旋回量の調節量を走行機体の速度に対応させて変更可能に構成しているため、かかる調節量を走行機体の速度に対応させて変更することで、種々の状況に即応させて走行機体の曲がり具合を変更することができる。
(もっと読む)
移動農機
【課題】圃場での作業に合わせて容易にステアリング可能な移動農機を提供する。
【解決手段】ステアリングハンドルの操舵範囲を複数の領域に分割して形成し、主に機体を旋回させる際に使用される旋回領域Bでは、ステアリングハンドルの操舵量に対する前輪の操向量の比率を、この旋回領域よりも操舵角の小さな領域である方向修正領域よりも大きく設定する。これにより、作業者は直進時には、ステアリングハンドルを方向修正用域で操舵して機体の方向を微調整すると共に、旋回時には、ステアリングハンドルを旋回領域まで操舵して、少しの操舵で機体を旋回させる。
(もっと読む)
作業車両の制御装置および制御プログラム
【課題】操作ストロークを増減させて微調整を行う場合にもオペレータの感覚通りの制御量(速度比)が得られるようにする。
【解決手段】第1のラインL11上の点から操作ストロークが増加して速度比が減少する方向に操作レバー装置が操作された場合には、第1のラインL11に従って速度比を演算する。第2のラインL12上の点から操作ストロークが減少して速度比が増加する方向に操作レバー装置が操作された場合には、第2のラインL12に従って速度比を演算する。第1のラインL11上の点から操作ストロークが減少して速度比が増加する方向に操作レバー装置21が操作された場合あるいは第2のラインL12上の点から操作ストロークが増加して速度比が減少する方向に操作レバー装置が操作された場合には、第3のラインL131、L132、L133、L134に従って速度比を演算する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】既存のポンプを用いた安価な回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを起動させることで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、電磁比例リリーフ弁62のリリーフ圧を無負荷状態から設定圧までの範囲内でアーティキュレート角に応じた圧に制御することで、プライオリティバルブ59をシフトさせて、ポンプ57からバケット作業機回路60aへの流量より小旋回圧供給回路60への流量を優先させるとともに、電磁比例リリーフ弁62に基づいて小旋回圧供給回路60の圧力を制御し、左旋回の場合は左小旋回制御弁63のみを弁開状態に制御する。
(もっと読む)
乗用車両
【課題】狭い場所で車両を回転させることができる乗用車両を提供する。
【解決手段】左右方向に並設されてフレーム部材11に配設された対の後輪33と、該後輪33に対し前側に配置されてフレーム部材11に設けられた前輪25とを備え、電気的駆動手段により走行駆動される乗用車両において、前輪25を路面から持ち上げる従動輪持ち上げ手段40を備え、両後輪33の回転速度を個別に変化させる。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御よって旋回内輪の前後力が低減されることに起因して運転者が走行阻害感の如き不満を感じる虞れを低減する。
【解決手段】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御を行う車両の走行制御装置。車輪の駆動力により車両を駆動することの困難性が高いときには該困難性が低いときに比して旋回内輪の前後力の低減が開始され難くし、また旋回内輪の前後力の低減量を小さくする。上記困難性は車輪の駆動力による車輪の移動に対する抵抗及び車輪から路面への駆動力の伝達のし難さの少なくとも一方を含み、例えば車両の実際の加速度と運転者の駆動操作量に基づく車両の規範加速度との偏差に基づいて判定される。
(もっと読む)
乗用車両
【課題】車両の走行中に操舵した際の車両姿勢をより安定化することができる乗用車両を提供する。
【解決手段】フレーム部材11に対して回動自在に連結され左右方向に並設された対の支持部材31と、該両支持部材31に配設された対の後輪33とを備え、電気的駆動手段により走行駆動される乗用車両において、フレーム部材11に対する両支持部材31の回動角度をそれぞれ変化させて両後輪33の進行方向における位置を変化させる対の車輪位置駆動手段30とを備え、ハンドル12の操舵時に両車輪位置駆動手段30の片側のみを駆動して、両後輪33の進行方向における位置を互いに異なるように変化させる。
(もっと読む)
車両の走行制御システム
【課題】走行車両を軌道に沿って走行させる走行制御システムを提供する。
【解決手段】走行車両200は、走行方向と直交する方向の両側において同軸上に配置された左右一対の車輪210、210を有し、これら車輪210、210にトルク指令を与えることで走行する。摩擦路面には、軌道Lから離れるに従って摩擦が小さくなるように摩擦係数の分布が設定されている。走行車両200は、左右の車輪210、210に対し同じトルク指令値を与えながら走行する。
(もっと読む)
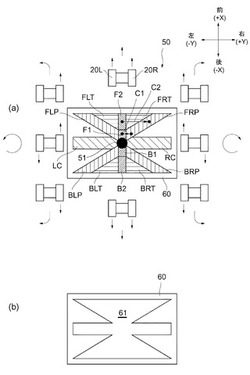
移動体駆動装置
【課題】簡易な装置構成で、スムーズな走行を実現することができるようにする。
【解決手段】ホイールベース決定部28によって、操作部16によって入力された操作に対応する操舵角に応じて、駆動輪と仮想操舵輪との間のホイールベースを、操舵角の絶対値が大きいほど短くなるように決定する。回転速度算出部30によって、決定されたホイールベースと、入力された操作に対応する速度及び操舵角とに基づいて、左右各々の駆動輪の回転速度を各々算出する。サーボアンプ19によって、算出された左右各々の駆動輪の回転速度に基づいて、右駆動部20R及び左駆動部20Lによる駆動を制御する。
(もっと読む)
1 - 20 / 154
[ Back to top ]