
Fターム[3D232CC02]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043) | 操舵安定性 (988)
Fターム[3D232CC02]の下位に属するFターム
Fターム[3D232CC02]に分類される特許
1 - 20 / 444
ステアリング装置およびフォークリフト
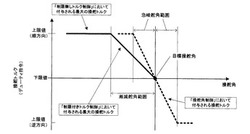
【課題】機械的な接触を行うことなく、実際の操舵角を目標操舵角で適切に維持できるようにする。
【解決手段】実際の操舵角(検出操舵角)が目標操舵角に到達するまでは、ステアリング51の操作トルクに応じて操舵輪に付与される操舵トルクが、漸減舵角範囲にわたって上限値から下限値にまで減少していく一方、目標操舵角に到達した以降は、逆方向の操舵トルクが、この漸減舵角範囲よりも狭い急峻舵角範囲にわたって下限値から上限値にまで増加していく。このように、操舵トルクが変化する操舵角範囲を、目標操舵角への到達以降において狭くすることで、操舵トルクの変化率が大きくなるため、その到達前に比べて操舵トルクが急峻に上限値まで増加していく。こうして、実際の操舵角が目標操舵角に到達した以降は、逆方向の操舵トルクが十分に大きくならない、というような操舵角範囲も当然狭くなる(漸減舵角範囲>急峻舵角範囲)。
(もっと読む)
車両制御システム

【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
制御装置およびフォークリフト
【課題】装置構成の大型化およびコスト増加を抑えつつ、意図しない旋回を防止できるようにする。
【解決手段】検出ヨーレートが想定ヨーレートの所定範囲外となるような場合に(s160)、検出ヨーレートの作用による本体2の旋回を相殺する方向へ駆動輪53を操舵させるべく操舵トルクを付与しているため(s180)、これにより検出ヨーレートが想定ヨーレートに近い値となる結果、意図しない旋回を防止することができる。このとき、検出ヨーレートを、実際のステアリング51の操作に応じたヨーレートである想定ヨーレートと所定範囲以内に近似させることにより、効果的に意図しない旋回が防止される。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
車両姿勢制御装置
【課題】タイヤのグリップ状態およびスリップ状態の双方において、車両仕様の変更による影響を受けることなく、目標方向に対する車両の進行方向のずれを小さくすることのできる車両姿勢制御装置を提供する
【解決手段】ヨーレートセンサの出力を「実ヨーレートγ」とし、車両1の左右中心軸C上に存在する任意の基準点において、進行方向DFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「車体すべり角β」とし、目標方向BFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「目標すべり角β*」とし、目標すべり角β*と車体すべり角βとの差(β*−β)を「角度差Δβ」とする。所定の目標方向BFに対する車両1の進行方向DFの角度を制御するために、車両姿勢制御装置は、角度差Δβの符号と実ヨーレートγの符号との関係に応じて車両1の前輪31,32および後輪33,34の少なくとも一方を制御する。
(もっと読む)
規範応答演算装置およびそれを用いた車両用操舵装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
電動パワーステアリング制御装置
【課題】自然なフィーリングを実現することが容易な電動パワーステアリング装置を提供する
【解決手段】アシストトルクを決定するアシスト決定部120は、ハンドルトルク推定値Thに基づいてハンドル側アシストトルクを決定するハンドル側アシスト決定部121と、路面反力トルク推定値Tlに基づいて路面側アシストトルクを決定する路面側アシスト決定部122とを備え、ハンドル側アシスト決定部121をフィルタとし、路面側アシスト決定部122は、路面反力トルク推定値Tlを定数倍する増幅器とする。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】ブラシ付きのモータに対する電流の目標値の大きさに関係なく該モータで発生する誘起電圧を算出できると共に、該誘起電圧の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に対する電流目標値Itを設定する電流目標値設定部30と、電圧センサ23からの検出信号に基づき電圧検出値Vdを検出する電圧検出部50と、バッテリ24の電源電圧Vpsに基づき電圧推定値Veを算出する電圧算出部51と、電流目標値Itが「0(零)」以外の値に設定される場合には電圧推定値Veに基づいた端子間電圧Vtを用いてモータ12で発生する誘起電圧Eを算出する一方、電流目標値Itが「0(零)」に設定される場合には電圧検出値Vdに基づいた端子間電圧Vtを用いて誘起電圧Eを算出する誘起電圧オブザーバ38と、を備えている。
(もっと読む)
車両用路面反力推定装置
【課題】本発明は、路面からステアリングラックにかかる力を精度良く推定可能とすることを目的としている。
【解決手段】このため、車速検出手段と、ハンドル切れ角検出手段と、車速検出手段の車速とハンドル切れ角検出手段のハンドル切れ角とを用いてセルフアライニングトルクを算出するセルフアライニングトルク算出手段と、路面反力推定手段を備える車両用路面反力推定装置において、車速に基づいて変換係数を設定する変換係数算出手段と、セルフアライニングトルク算出手段のセルフアライニングトルクの単位時間当たりの変化量を算出するセルフアライニングトルク変化量算出手段を備え、路面反力推定手段は、セルフアライニングトルク算出手段のセルフアライニングトルクと変換係数算出手段の変換係数とセルフアライニングトルク変化量算出手段のセルフアライニングトルク変化量とドライフリクション値と粘性摩擦係数とに基づいて路面反力を推定する。
(もっと読む)
ステアリング装置、産業車両およびプログラム
【課題】産業車両に搭載されるステアリング装置において、ストッパーの位置関係を調整することなく、所望の旋回半径で安定的に旋回できるようにする。
【解決手段】操舵輪の操舵角が設定操舵角に到達した以降(s230「YES」)、ステアリング51への操舵トルクが制御されることで(s240)、設定操舵角を超えるような操舵輪の操舵が制限される。「設定操舵角」は、フォークリフトを所定の旋回半径で旋回させるのに適した操舵角として、設定変更可能な値であるホイルベースに応じたものが設定されるため(s220)、フォークリフトの機種などによりホイルベースが異なる場合であっても、このホイルベースを事前に設定変更しておくことにより、ホイルベースの違いに拘わらず、所望の旋回半径で安定的に旋回できるようになる。
(もっと読む)
電動パワーステアリング装置
【課題】車速によらず、制御安定性を確保するとともに、操舵フィーリングが低下することのない電動パワーステアリング装置を提供する。
【解決手段】電動モータにアシストトルクを発生させるアシスト電流Iaの値を、操舵トルクセンサ30により検出された操舵トルクVT3の値で割った除算値(アシスト電流/操舵トルク=Ia/VT3)が大きい程、操舵トルクセンサ30から出力される操舵トルクVT3に対して大きな遅れ位相補償(小さな進み位相補償)を施すようにしたので、制御安定性が確保されるとともに、操舵フィーリングが低下する除算値の小さい領域では、大きな進み位相補償を施すようにしたので、良好な操舵フィーリングが得られる。よって、低速での操舵フィーリングも低下することがない。
(もっと読む)
ステアリング制御装置
【課題】車両の発進直後のステアリング操作性を向上させる。
【解決手段】ステアリング制御装置1は、車両2の直進に対応する中立位置を含む範囲で回転操作されるステアリングホイール5に対してトルクを付与するモータ10と、ステアリングホイール5の回転操作に応じて変動する車両2の操舵角を検出する操舵角センサ11と、車両2が発進直後であるか否かを判定する発進判定部22と、車両2が発進直後であると発進判定部22が判定したとき、操舵角センサ11が検出した操舵角に基づいて、中立位置へ向かって作用する中立方向トルクのトルク量を決定し、決定したトルク量の中立方向トルクをモータ10に発生させるトルク制御部22と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することが可能な電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、γ軸電流指令値Iγ*の上限値(電流指令上限値Ilim)を演算する電流指令上限値演算部73と、γ軸電流指令値Iγ*を電流指令上限値Ilim以下に制限する電流指令値制限部74とを備える。そして、電流指令上限値演算部73は、車速Vが速いほど、より低い値となるように電流指令上限値Ilimを変更(演算)する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】電流指令値制限部74は、電流指令上限値演算部73が演算する電流指令上限値Ilim以下にγ軸電流指令値を制限する。また、電流指令上限値演算部73に設けられた切替制御部75は、演算周期毎のモータ回転角変化量に相当する加算角の基礎成分、即ちトルク偏差Δτに基づく第1変化成分dθτ、及びモータの回転により生ずる誘起電圧(誘起電圧二乗和Esq_αβ)に基づいて、モータの制御状態が安定的であるか否かを判定する。そして、切替制御部75は、その制御状態が不安定であると判定した場合には、上記電流指令上限値Ilimを、当該制御状態が安定的である場合の値(Ilim_a)よりも高い値(Ilim_b)に変更すべき旨を決定する。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできる電動パワーステアリング装置を提供すること。
【解決手段】第2制御部は、目標操舵トルクτ*に実際の操舵トルクを追従させるべく、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより制御上の仮想的な回転角を演算する。また、第2制御部は、トルク偏差Δτに基づくγ軸電流増減値ηを演算し、当該γ軸電流増減値ηを積算することによりγ軸電流指令値Iγ*を演算する。そして、上記制御上の回転角に従う回転座標系において電流フィードバック制御を実行する。更に、第2制御部(電流指令値演算部61)は、上記γ軸電流指令値Iγ*を電流指令上限値以下に制限する電流指令値制限部73を備える。そして、当該電流指令値制限部73は、上記トルク偏差Δτに基づいて電流指令上限値を変更する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】電流指令値制限部は、電流指令上限値演算部が演算する電流指令上限値Ilim以下にγ軸電流指令値を制限する。また、電流指令上限値演算部に設けられた切替制御部は、その制御上の仮想的なモータ回転角としての制御角と実回転角との乖離を示す負荷角(誤差角)θLの(正弦成分である「sinθL」)を推定し、その負荷角θLに基づいて、モータの制御状態を判定する。そして、切替制御部は、その制御状態が不安定化状態にあると判定した場合には、上記電流指令上限値Ilimを、当該制御状態が安定的である場合の値(Ilim_a)よりも高い値(Ilim_b)に変更すべき旨を決定する。
(もっと読む)
車両および車両制御プログラム
【課題】操舵支援を行いながら、走行経路に沿って滑らかに車両を走行させることができる車両および車両制御プログラムを提供すること。
【解決手段】推奨軌道に沿って車両1が走行するためのハンドル13の推奨ハンドル角φiを定め、実際のハンドル角φjと推奨ハンドル角φiとの差の絶対値が大きいほど、大きな補助力Fを、ハンドル13に対して、ハンドル角が推奨ハンドル角φiへ近づく方向に付与する。これにより、搭乗者は、ハンドル13を回転操作させなくても、ハンドル13に対して付与される補助力Fの方向および大きさから、推奨ハンドル角φiへと近づけるためにハンドル13を操作すべき方向やハンドルの操作量を容易に把握できる。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
1 - 20 / 444
[ Back to top ]