
Fターム[3D232CC04]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043) | 操舵安定性 (988) | 外乱に対する安定性 (367)
Fターム[3D232CC04]の下位に属するFターム
Fターム[3D232CC04]に分類される特許
1 - 20 / 151
操舵制御装置
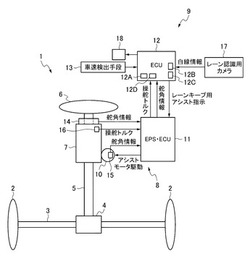
【課題】操舵制御装置において、車両が路面の轍や落下物を通過して車両の進路に影響するような外乱が入ったとしても、車両の安定性を確保して直進を継続しやすくすることにある。
【解決手段】操舵用制御手段(12)は、判定手段(12A)により運転者が操舵ハンドル(6)を握っていないと判定された時に、操舵ハンドル(6)をセンター位置に維持するように操作力軽減アクチュエータ(10)の作動を制御する制御信号をアクチュエータ制御手段(11)に出力する。
(もっと読む)
車両用操舵装置

【課題】車両が砂利道等を走行している場合に、転舵輪の振動が操舵部材に伝達されるのを抑制できる車両用操舵装置を提供する。
【解決手段】伝達比可変装置7は、第1シャフト11および第2シャフト12を差動回転可能に連結する差動機構13と、差動機構13を駆動する伝達比変更用モータ14とを有している。伝達比変更用モータ14は、実act角演算部76によって演算された実act角θactが目標act角演算部71によって演算された目標act角θact*に等しくなるようにフィードバック制御される。外乱判定部77によって第2シャフト12に外乱が入力されていると判定されたときには、伝達比変更用モータ14のフィードバック制御に用いられる比例ゲインKPが通常よりも低減される。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバの視線と走行路との交点に到達するまでの時間が小さい状況における車両軌跡追従特性のダンピンの悪化を改善し、軌跡追従特性に優れた車両運動を実現する。
【解決手段】注視時間算出部30で、内向きカメラ12で撮像されたドライバの顔画像、外向きカメラ14で撮像された車両前方画像、及び車速センサ16で検出された車速Vに基づいて、注視時間Tを算出し、注視時間判定部32で、注視時間Tが予め定めた閾値Tthより小さいか否かを判定し、T<Tthの場合には、ダンピング変更部36で、ヨー角検出部34で検出された自車両のヨー角θと目標軌跡のヨー角θdとの差と、予め定めたダンピング特性とフィードバックゲインkp1との関係を示すテーブルに基づいて取得された必要なダンピング特性を得るためのkp1との積で表される偏差フィードバックδf_addを算出し、前輪舵角装置20へ出力する。
(もっと読む)
後輪トー角制御装置
【課題】直進走行時であっても外乱に対する直進走行性を有効に高めることのできる車両挙動制御を提供する。
【解決手段】電動パワーステアリング装置を備え、後輪5l、5rのトー角可変制御される後輪トー角可変式の自動車Vに設けられ、後輪のトー角の制御に供される後輪トー角制御装置において、ヨーレートを検出するヨーレートセンサと、横加速度を検出する横加速度センサとを備え、検出されたヨーレートと横加速度とに基づいて、外力Fpの働く位置が車体重心CGよりも前方である場合、後輪5のトー角をトーイン側に設定し、外力Fpの働く位置が車体重心CGよりも後方である場合、後輪5のトー角をトーアウト側に設定する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】ドライバが、広い運転領域で操舵輪のグリップ状況を舵力インフォメーションとして舵力で感じとりながら安心して適切な運転を行う。
【解決手段】操舵制御部は、ハンドル角と車速に応じて車両の運動モデルに基づき目標横加速度Gytを算出し、実際の横加速度と目標横加速度Gytとの偏差(横加速度偏差)ΔGyを算出し、操舵速度の絶対値と車速とに応じて現在の操舵状態がドライバが舵力をフィードバックして操舵している状態か否か判定し、ドライバが舵力をフィードバックして操舵している状態と判定し、且つ、横加速度偏差ΔGyが予め設定しておいた設定値CG以上の場合は、車速と操舵トルクを基に設定する基本アシストトルクTbを増加する方向に補正して、この補正した基本アシストトルクTbをアシストトルクTaとしてモータ駆動部に出力する。
(もっと読む)
車両運動制御システム
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
電動パワーステアリング装置
【課題】外乱の存在する環境下においても走行軌跡の乱れを抑えて円滑に自動制御を実行することのできる電動パワーステアリング装置を提供すること。
【解決手段】ECUは、二系統の独立したモータコイルに対応して設けられた二つの駆動回路26A,26Bと、これら各駆動回路26A,26Bに対して二系統の独立した制御信号Smc_a,Smc_bを出力するマイコン27とを備える。マイコン27は、アシスト力に対応したモータトルクを発生させるべく、電流制御を実行することにより第1系統の駆動回路26Aに対して制御信号Smc_aを出力する第1制御信号出力部31Aを備える。そして、更に、転舵輪の舵角を変更すべく車内ネットワークを介して上位ECUから入力される操舵角指令値θs*に基づいて、位置制御を実行することにより第2系統の駆動回路26Bに対して制御信号Smc_bを出力する第2制御信号出力部31Bを備える。
(もっと読む)
差動制限機構の制御装置
【課題】差動制限機構の制御装置に関し、差動制限機構の作動時に発生する操舵反力変化を操舵アシスト力によって抑制するものにおいて、操舵アシスト力を付与できない操舵アシスト側のインタロック作動時にも操舵反力変化を抑制することができるようする。
【解決手段】車両の左右輪4FR,4FLの差動を制限する差動制限機構5と、車両の操舵に対しアシストトルクを付加するパワーステアリング機構8とを有し、差動制限機構5の動作に応じて、パワーステアリング機構8の制御量を増減制御する制御手段10とを有すると共に、パワーステアリング機構8のインタロックの作動を検出するインタロック作動検出手段を有し、制御手段10は、インタロック作動検出手段によりインタロックの作動を検出した際には、差動制限機構5の制御量を減少させる。
(もっと読む)
サーボ制御装置
【課題】サーボ制御における積分項を外乱の状況に応じて適正に設定し、オーバーシュートを低減しつつ外乱の影響を補償する。
【解決手段】曲率制御部42から出力される旋回のフィードフォワード制御の操舵トルクと、横位置制御部43から出力される車両の横位置制御の操舵トルクと、姿勢制御部44から出力される車両の鉛直軸回りの姿勢制御の操舵トルクと、積分制御部45から出力される横位置制御の偏差を補償する操舵トルクとを合算した目標操舵トルクを操舵系に与えて操舵支援を行う。その際、外乱変化に対する適切なタイミングで積分値をリセットし、また、外乱の大きさに応じた適切な積分量、積分範囲の制限等を行うことで、オーバーシュートを低減しつつ外乱の影響を補償する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】障害物を回避直後の速度方向及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を求めるために導入した第1の導入パラメータν1の特定仮定下での値ν1’との関係、第2の導入パラメータν2の特定仮定下での値ν2’との関係、障害物の回避に要する時間teの特定仮定下での時間te’との関係を定めた最短3次元マップを用いて、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を導出する。
(もっと読む)
電動パワーステアリング装置
【課題】開始判定の精度を低下させることなく修正操舵後の速やかな補償成分の重畳再開を可能として、より好適に運転者の負担を軽減することのできる電動パワーステアリングを提供すること。
【解決手段】リードプル補償制御部は、車両が直進状態から非直進状態へと移行した場合には、そのLP制御量Ilp*の出力を停止する。また、リードプル補償制御部は、非直進状態への移行後、復帰判定期間t0を設定するとともに、当該復帰判定期間t0内に非直進状態から直進状態への復帰があるか否かを判定し、その復帰があった場合には、開始判定期間T1よりも短い再開判定期間T2を設定する(T2<T1)。そして、この再開判定期間T2を超えて直線状態が継続することを条件にLP制御量Ilp*の出力を再開する。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】ステアリング位置の変更等が行われてもコラム剛性を適切に維持し、振動、騒音が悪化することなく、操舵の車両応答性や舵のしっかり感を良好に保つ。
【解決手段】基本アシストトルクTbを0に設定する不感帯をステアリング位置Ptと車速Vに基づいて可変設定し、車速Vと操舵トルクTsに応じて基本アシストトルクTbを設定し、ステアリング位置Ptと車速Vに基づいて基本アシストトルクTbに対して乗算補正するトルク補正係数Acを演算し、ステアリング−ラックねじれ量Sと車速Vに基づいて基本アシストトルクTbに対して増減補正する増減補正量Bcを演算し、基本アシストトルクTbにトルク補正係数Acを乗算し、この値を増減補正量Bcで増減補正してアシスト指示値Taを演算し、該演算したアシスト指示値Taをモータ駆動部21に出力して電動モータ13を駆動して操舵トルクをアシストする。
(もっと読む)
電動パワーステアリング
【課題】ステアリング機構の操舵力を電動モータでアシストするアシスト制御を行うシステムにおいて、路面状態に応じた適正なアシスト制御を行うことができるようにする。
【解決手段】車両が走行する路面状態(例えば、舗装路、雪道、草原、岩場等)に応じて運転者が路面モード選択スイッチ17を操作することで、車両が走行する路面状態に対応した路面モード(例えば、舗装路モード、雪道モード、草原モード、岩場モード等)を選択する。そして、路面モード選択スイッチ17で選択された路面モードに応じてアシスト制御の制御特性(例えば、車速と操舵トルクとアシストトルクとの関係)を変更することで、車両が走行する路面状態に応じた適正なアシスト制御を行う。その際、路面モード選択スイッチ17で路面モードが切り替えられた場合に、ステアリング機構の操舵角が中立位置でないときには、アシスト制御の制御特性の変更を禁止する。
(もっと読む)
パワーステアリング装置
【課題】ロックエンドについての誤判断を抑制し得るパワーステアリング装置を提供する。
【解決手段】操舵アシスト用の電動モータ1を駆動制御するコントロールユニットに、主として操舵トルクTに基づいて算出した目標アシスト電流Itから電動モータ1に付与する電流指令値Ioを演算する電流指令値演算部24aと、操舵角θを基に電動モータ1に付与する電流指令値Ioの最大値Ieを制限するか否かを判定する電流最大値制限判定部24bと、から構成されるモータ制御部24を設けた。そして、このモータ制御部24において、操舵角θが予め定めた電流制限設定角度θg以上の場合に、前記電流指令値Ioの最大値Ieを、操舵角θが前記電流制限設定角度θgより小さい場合における電流指令値Ioの最大値Ieよりも小さくなるように設定するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】操舵フィーリングを向上させることができる電動パワーステアリング装置を提供することを課題とする。
【解決手段】基本アシスト指令値決定手段201にフリクションを補償するためのフリクション補償値を決定するフリクション補償値決定手段220と、ステアリングホイール2の操舵角を検出する操舵角検出手段37と、操舵角検出手段37からの信号に基づきステアリングホイール2の回転速度を算出する舵角速度算出手段240を有し、往き状態時と戻り状態時のフリクション補償値決定手段220からのフリクション補償値を操舵角が大きくなるに従って大きくしたことを特徴とする。
(もっと読む)
電動パワーステアリング装置の電流制御装置
【課題】高周波の外乱電圧により発生する振動を抑制するとともに、電流制御の目的である目標電流からモータに流れる電流の追従特性への影響を、電動パワーステアリングシステム全体の位相余裕及びゲイン余裕を十分確保し、安定性を失わないレベルまで小さくできる電動パワーステアリング装置の電流制御装置を得る。
【解決手段】外乱電圧により発生する振動を抑制する電動パワーステアリング装置の電流制御装置であって、目標電流値に対して電流検出値を追従させるフィードバックループ中に、外乱電圧からモータに流れる電流を定めるまでのループの伝達特性が、外乱電圧の周波数とノッチ周波数が一致するノッチフィルタ特性となる共振型位相補償器2を挿入する。
(もっと読む)
パワーステアリング装置
【課題】出力値が発散、又はアンダーフロー若しくはオーバーフローすることなくシミー変動を抑制し得るパワーステアリング装置を提供する。
【解決手段】 電子コントロールユニットに、シミー変動を抑制する振動抑制信号Tvを演算する振動抑制信号演算部22を有し、シミー変動成分Smの発生時における位相とパワーシリンダにおいて振動抑制信号Tvに基づく操舵力が発生した時の位相との差が90度より大きく270度より小さい特性を有するパワーステアリング装置であって、振動抑制信号演算部22を、トルクセンサにより検出された操舵トルク信号Tからシミー変動成分Smを抽出するバンドパスフィルタ31と、この抽出されたシミー変動成分Smの位相を反転させることで前記位相差を補正する位相補正手段32と、により構成することにより、シミー変動成分Smを容易かつ良好に減少させることができる。
(もっと読む)
車両挙動制御装置
【課題】路面反力トルクに基づいて車両挙動を制御する車両挙動制御装置において、より精度の高い車両状態の推定を行うことで車両挙動の制御が適正化されるようにする。
【解決手段】車両のハンドル角を検出するハンドル角検出手段15、前記車両の車速を検出する車速検出手段11、前記車両の車輪に生じる実路面反力トルクを検出する路面反力トルク検出手段16、前記ハンドル角と前記車速に基づいて目標路面反力トルクを演算する目標路面反力トルク演算手段17、及び前記実路面反力トルクと前記目標路面反力トルクに基づいて車両状態を検出し車両状態検出信号を前記車両挙動を制御するための出力とする車両状態検出器18を備え、前記路面反力トルク及び前記目標路面反力トルクの少なくとも一つに対する所定の不感帯aを有しこの所定の不感帯に基づき前記実路面反力トルクと前記目標路面反力トルクとの位相ずれによる誤制御を適正化する。
(もっと読む)
車両挙動センサの中点補正方法
【課題】中点学習を必要とし、車両走行中に中点学習を実施する車両挙動センサの誤学習の発生を抑制できる中点補正方法を提供する。
【解決手段】車両挙動センサの中点補正方法は、車両挙動センサの出力値から中点補正値が順次算出される中点補正算出工程と、中点補正値として略同等の値が連続して算出された場合には中点補正が実施され、前回の中点補正値と今回の中点補正値とが異なる場合には中点補正が実施されない中点補正判定工程とを有する。
(もっと読む)
1 - 20 / 151
[ Back to top ]