
Fターム[3D232CC20]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043) | 自動走行への対応(車庫入れ機能を含む) (800)
Fターム[3D232CC20]に分類される特許
161 - 180 / 800
車両の走行制御装置および車両の走行制御方法
【課題】車両が障害物に接触することを回避するための走行制御を行う際に、運転者に与える違和感を低減するとともに、回避軌道への誘導を適切に行う。
【解決手段】リスク演算部は、選択された回避軌道を処理対象として、回避軌道と略直交方向に延在する所定範囲における障害物との接触可能性をリスクとして演算する。また、制御抑制部は、演算されるリスクに応じて、走行制御部による走行制御を抑制する。また、操舵反力調整部は、選択された回避軌道に対する自車両の走行状況に応じて、運転者の操舵操作に対する操舵反力を調整する。
(もっと読む)
車両の走行制御装置および車両の走行制御方法

【課題】車両が障害物に接触することを回避するための走行制御を行う際に、運転者に与える違和感を低減する。
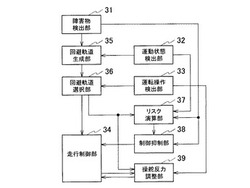
【解決手段】リスク分布演算部34は、検出した障害物の情報と、検出した車両の運動状態とに基づいて、回避軌道について、軌道直交方向に延在する範囲におけるリスクを演算する。そして、制御抑制量演算部37は、リスク分布演算部34で演算したリスクより、回避軌道に追従する走行制御量(基本走行制御量)の制御抑制量を算出する。さらに、走行制御量演算部38は、回避軌道選択部36によって選択された回避軌道に追従する走行制御量を、演算した制御抑制量を考慮して演算する。
(もっと読む)
車両の駐車支援システム
【課題】演算負荷を低減し、コスト増を回避しつつ、1回の切り返しのみならず、複数の切り返しで駐車スペースに車両を自動的に駐車させることができる駐車支援の手法を提供する。
【解決手段】自動操舵によって駐車させるシステムは、駐車スペースの幅および該駐車スペースに面している道路の幅を検出する。1回の切り返しにより駐車スペースに駐車させる駐車経路および複数の切り返しにより駐車スペースに駐車させる駐車経路が、駐車スペースの幅および該駐車スペースに面した道路の幅に従って予め定義された駐車経路テーブル41が設けられる。検出された駐車スペースおよび道路の幅に基づいて、駐車経路の候補を駐車経路テーブル41から読み出す。駐車のために前記車両が停車したときに特定された車両の位置に基づいて、該読み出した駐車経路の候補のうちの1つを選択する。該選択した駐車経路に従って車両を誘導するよう、該車両のステアリングを駆動する。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に違和感の少ない支援を行うことでドライバビリティの向上を図る。
【解決手段】車両に作用する力を調整して車両の走行を制御可能に構成し、車両の走行状態に応じて車両に作用する力を調整する作用力調整手段と、ドライバが車両の走行を操作する操作部材の操作状態を検出する操作状態検出手段と、操作部材の操作状態に応じて作用力調整手段による調整度合を変更する調整度合変更手段とを設ける。
(もっと読む)
車両の自動操舵制御装置
【課題】車両を目標走行線に追従させるための操舵角修正が頻繁になることを防止すると共に乗り心地を快適に維持する車両の自動操舵制御装置を提供する。
【解決手段】道路に配置された指標から自車が走行するべき目標走行線を設定して自動操舵を行う車両の自動操舵制御装置であって、各タイヤにタイヤ圧力センサを備え、各サスペンションに該サスペンションを駆動するサスペンションアクチュエータを備え、上記各タイヤのタイヤ圧力の関数で定義される操舵安定状態量が所定値となるように上記各サスペンションアクチュエータを制御するコントローラを備える。
(もっと読む)
車両の制御装置
【課題】操舵角と実舵角との関係が可変である操舵機構を搭載する車両において、方向指示器の方向指示動作を的確なタイミングで終了させる。
【解決手段】操舵機構とEPSアクチュエータとVGRSアクチュエータとを備え、これらの協調制御により、操舵角MAと実舵角δstとの関係が可変に制御され得る車両において、ECUは、ウィンカオフ制御を実行する。当該制御においては、ウィンカレバーが操作された場合に、ステアリングギア比n、ホイールベースL、スタビリティファクタKH、ヨーレートγ及び車速Vに基づいて、実舵相当角δが演算される。ECUは、この演算された実舵相当角δが、予め設定された閾値を減少側へ超えた場合に、ウィンカレバーのロック解除により中立位置への復帰及び方向指示灯の点滅点灯制御の終了を含むウィンカオフ処理を実行する。
(もっと読む)
走行制御装置
【課題】アクチュエータによる操舵角速度の左右非対称性に起因する制御性能上の制限をなくし、自動操舵の制御性能を十分に発揮可能な走行制御装置を提供する。
【解決手段】車両が走行する前方の道路情報を検出するカメラS1と、カメラS1からの道路情報から目標進行ラインを演算すると共に、走行中の車両のハンドル2の目標操舵角を決定する自動操舵コントローラ3と、自動操舵コントローラ3で決定された目標操舵角に基づいて、ハンドル2を目標操舵角となるように制御する油圧回路からなるアクチュエータ4とを備えた走行制御装置において、自動操舵コントローラ3からの目標操舵角を基に、アクチュエータ4の左右方向の目標操舵角に対してアクチュエータ4による左右の操舵角速度が同じとなるように指示電流を決定してアクチュエータ4に出力する左右対称補償部5を備えたものである。
(もっと読む)
車両
【課題】高速走行時の直進安定性を高め、乗り心地の向上を図ることが可能な車両を提供する。
【解決手段】軌道に沿って設置されたガイドレールにガイドされて走行する車両に、左右の車輪のトーイン角度を調節可能なアクチュエータと、前記車両の進行方向に応じたトーイン角度となるように前記アクチュエータを制御するトーイン制御装置とを設ける。
(もっと読む)
車両制御装置
【課題】走行制御の追従性の向上を図ることのできる車両制御装置を提供すること。
【解決手段】車両1の走行制御を行う運転支援制御を運転支援制御部69で実行する際に、道路状態取得部70で取得した道路の状態より目標軌跡演算部72で仮の目標軌跡を生成し、仮の目標軌跡より、走行抵抗であるコーナリングドラッグを走行抵抗推定部71で推定する。さらに、このコーナリングドラッグを利用して、目標軌跡演算部72で将来の目標軌跡を生成する。このため、生成する目標軌跡と実際の車両1の走行時の走行軌跡とのずれを低減することができ、車両1の走行制御を、車両1の実際の走行に沿った制御に近づけることができる。これにより、運転支援制御時における車両1の挙動のフィードバック量を低減させることができる。この結果、運転支援制御により車両1の走行制御を行う際の制御の追従性の向上を図ることができる。
(もっと読む)
車両の運転支援装置
【課題】画像情報に基づく運転者の支援を効率的に行う。
【解決手段】車両1が駐車場2で、後進して駐車する際に、カメラユニット10で撮像する画像を情報ディスプレイ4に表示し、運転支援を行う。カメラユニット10の視野10aは、運転者からは死角になる車体後部の下方に向けられる。撮像した画像は、駐車アシストECU6で処理され、白線3の認識や、ステアリング1aの操作に対応する進行予測曲線5の表示などが行われる。進行予測曲線5を撮像する実像に重ね合せて表示するので、判りやすい案内を行うことができる。
(もっと読む)
車両運動制御システム
【課題】ドライバーの違和感を低減して車両の適正な挙動を確保できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1では、車両10の操舵角に基づき推定された将来の横加速度と、将来の道路情報に基づき推定された将来の横加速度とのうち低い方の横加速度が選択される。また、この選択にて車両10の操舵角に基づき推定された将来の横加速度が選択された場合には、現在の車両状態に基づき推定された車両の将来の座標と将来の道路情報とが用いられて車両10が所定のコースから逸脱するか否かが判定される。そして、この判定にて肯定判定が行われた場合には、将来の道路情報に基づき推定された将来の横加速度が用いられて、目標ヨーレートが算出される。
(もっと読む)
アウターミラー装置
【課題】車両の向きと進行方向にずれが生じた場合でも進行方向に撮像範囲を補正することができるアウターミラー装置を提供する。
【解決手段】撮像範囲補正装置1は、主に、車両2の周囲を撮像する左撮像部10、及び右撮像部11と、車両2の操舵角δに基づいて、左撮像部10の撮像範囲210、及び右撮像部11の撮像範囲220を補正する補正情報を生成する補正情報生成部18と、補正情報生成部18から入力した補正情報に基づいて左及び右撮像部10、11を駆動して撮像範囲210、220を補正する駆動部12と、補正された撮像範囲210を撮像した左撮像部10から出力された左画像情報、及び補正された撮像範囲220を撮像した右撮像部11から出力された右画像情報に含まれる対象物3と車両2との距離を算出する距離算出部17と、を備えて概略構成される。
(もっと読む)
走行制御装置
【課題】自車両の横方向の移動に関する走行制御を、先行車両の状態に応じて適切に行うことができる走行制御装置を提供する。
【解決手段】操舵制御装置1では、ECU7において先行車両位置情報に基づき操舵制御の制御量が算出され、算出された制御量で操舵制御が実行される。さらに、操舵制御装置1では、ミリ波レーダ6によって先行車両の自車両Cに対する車間距離が検出され、ECU7において、検出された車間距離に応じて操舵制御の目標制御量のゲイン値が変更される。つまり、操舵制御の目標制御量が、先行車両の状態に応じて変更される。
(もっと読む)
制御装置
【課題】車両の搭乗者に対して安心感をもたらしつつ車両を旋回させることができる制御装置を提供すること。
【解決手段】制御装置100は、車両1に対して設定される障害物監視エリア内に障害物が入った(存在)ことを検出したら、その障害物を監視エリア内から除外するように車両1を旋回させる。本実施形態の制御装置100は、車両速度Vが速くなる程、側面方向の幅Wが長くなるように障害物監視エリアを設定するので、監視エリアにおいて幅Wが長くなった分だけ、障害物から遠くに離れて車両1を旋回させることができる。よって、車両1の車両速度Vが速くなる程、より障害物から遠くに離れて車両1を旋回させることができるので、車両1の搭乗者に対して安心感をもたらすことができる。
(もっと読む)
駐車支援装置
【課題】積載重量の違いにかかわらず、駐車時に設定された移動軌跡に対して高精度な駐車位置制御を行う。
【解決手段】サスペンションストロークを検出するストロークセンサ14からの検出信号と定荷重時のサスペンションストロークとなる規定値との差分に応じて、その差分により生じるトー角の変化に対する転舵角の補正値を転舵角補正部34により求め、自動駐車時には、その移動軌跡に対して設定された転舵角を補正して、操舵輪を転舵するESP24を制御する。積載重量の変化によりサスペンションストロークに変化が生じて操舵輪のトーインが変化し、規定値に基づいて設定した転舵角では回転半径が変わってしまうのに対して、サスペンションストロークの変化に応じて転舵角を補正して、設定した移動軌跡に対して高精度な自動駐車を行うことができる。
(もっと読む)
制御装置
【課題】障害物の回避時における車両の安全性を向上させることができる制御装置を提供すること。
【解決手段】制御装置100は、車両1の走行の障害となり得る障害物Z1を検出したら、その障害物を回避するために車両1を旋回させる。旋回が終了したら、車両1の側面のうち、回避物(回避した障害物)Z1がある側面側に回避物監視エリアKを設定して、車両1が回避物Z1の横を通過するまでの間、その回避物Z1を監視する。本実施形態の制御装置100では、回避物監視エリアK内において回避物Z1が検出されなくなるまで、その回避物Z1側への車両1の旋回を制限しているので、回避中の回避物に車両1が衝突する可能性を低下させることができる。よって、障害物の回避時における車両1の安全性を向上させることができる。
(もっと読む)
駐車支援制御装置及び方法
【課題】 本発明は、所定の車両状態を考慮して、ステアリング制御モードを実行することができる駐車支援制御装置及び駐車支援制御方法の提供を目的とする。
【解決手段】 予め計算により定められた駐車領域に自車両を誘導するために必要な情報をドライバーに提供する情報提供モードと、前記自車両のステアリングを自動制御することにより前記駐車領域に前記自車両を誘導するステアリング制御モードとを有する駐車支援制御装置において、前記駐車支援制御装置は、判定条件1が成立するかを判定し、判定条件1が成立する場合にステアリング制御モードを実行し、判定条件1が成立しない場合に情報提供モードへの移行をドライバーに確認する。
(もっと読む)
車両の周辺地上高を検出して作動する安全装置及び周辺地上高検出装置
【課題】 車体の大きな揺れを惹起し得る車両の車輪の脱輪の可能性を事前に検知し、脱輪の予防或いは脱輪時の乗員の早期保護を可能にする装置を提供すること。
【解決手段】 本発明の装置は、走行中の車両の周囲の地面の画像を逐次取得する手段と、少なくとも二つの地面の画像に於いて写っている同一の像の移動量から車両の周辺地上高を算出する手段と、周辺地上高に基づいて車輪が脱輪する可能性の有無を判定する手段とを含み、周辺地上高と現在走行中の路面の高さとの差が所定の高さを越える領域と車両との距離が所定の距離より短くなったときに車輪が脱輪する可能性が有ると判定する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
車両の出庫モード選択表示装置
【課題】駐車モードに応じて適切な出庫モードを選択する表示装置を提供する。
【解決手段】出庫モード選択表示装置は、駐車スペースへの車両の駐車形態を示す駐車モードのそれぞれに対応して、駐車スペースからの車両の出庫形態を示す出庫モードを予め記憶する出庫モード記憶手段と、車両が駐車スペースに駐車するとき、該駐車の駐車モードを判定する駐車モード判定手段と、車両が前記駐車スペースに駐車した後、該車両の乗員からの該駐車スペースからの出庫開始指示を検出する手段と出庫開始指示に応じて、出庫モード記憶手段から、該判定された駐車モードに対応する出庫モードを選択して表示する選択表示手段と、を備える。自動操舵によって駐車された場合のみならず、手動操舵によって駐車された場合にも駐車モードを判定することができる。
(もっと読む)
161 - 180 / 800
[ Back to top ]