
Fターム[3D232CC20]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043) | 自動走行への対応(車庫入れ機能を含む) (800)
Fターム[3D232CC20]に分類される特許
81 - 100 / 800
障害物回避支援装置及び障害物回避支援方法
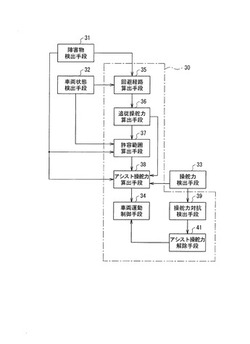
【課題】運転者の意図に応じた障害物回避支援の解除を確実に反映できるようにする。
【解決手段】自車両前方に回避が必要な障害物を検出すると、その障害物に対する回避軌道を求め、その回避軌道に基づいて自車両を走行制御するための追従操舵力を算出する。その算出した追従操舵力と運転者の操舵力に基づいてアシスト操舵力を算出して障害物回避のための走行制御を行う。そして、上記運転者の操舵力がアシスト操舵力に対抗して保舵する力を超えたことを検出したら、自車両のアシスト操舵力の解除と判定する。
(もっと読む)
車両の操舵支援装置及び操舵支援方法

【課題】自車両の操舵角を目標とする操舵角へ素早く収束させることが可能な、車両の操舵支援装置及び操舵支援方法を提供する。
【解決手段】目標操舵角と現在操舵角との乖離度である操舵角偏差を算出する操舵角偏差算出回路6と、操舵角偏差を縮小させるための操舵支援トルクを算出するトルク指令値算出装置10と、トルク指令値算出装置10が算出した操舵支援トルクをステアリングホイールへ出力するEPS14と、操舵角偏差が縮小傾向にある状態では操舵支援トルクの減衰度合いが予め設定した減衰度合いよりも大きく、操舵角偏差が拡大傾向にある状態では操舵支援トルクの減衰度合いが予め設定した減衰度合い以下となるように、トルク指令値算出装置10が算出した操舵支援トルクを減衰させる減衰指令信号を算出し、算出した減衰指令信号により操舵支援トルクを減衰させるトルク指令減衰回路12を備える。
(もっと読む)
車両の走行支援装置及び走行支援方法
【課題】狭路における走行時の操舵支援において、運転者に与える違和感を低減させることが可能な車両の走行支援装置及び走行支援方法を提供する。
【解決手段】自車両Vの車幅方向両側のうち少なくとも一方における自車両Vの障害物への近接度合いと、自車両Vが有するステアリングホイール16へ運転者が入力した操舵トルクとに基づいて、操舵トルクと逆方向のトルクである走行支援トルクを算出し、その算出した走行支援トルクをステアリングホイール16へ出力し、走行支援トルクと操舵トルクとの偏差が予め設定したトルク偏差閾値以上の場合に、走行支援トルクの出力を停止する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
自動車の運転者を支援するための方法
【課題】従来技術の欠点を改善すること。
【解決手段】この課題は、自動車(11)の運転者を走行操作時に支援するための方法において、
(a)自動車(11)の周囲を検出し、前記自動車(11)の周囲の二次元図を表示し、
(b)前記自動車(11)の所期の最終位置(45)が運転者によって入力され、該最終位置(45)を前記二次元図にマークし、
(c)前記最終位置(45)に到達するための軌道(49)を決定し、該軌道(49)に追従するための指示を運転者に出力するか、または、自動車(11)を前記軌道(49)に沿って前記最終位置(45)へと操作する自動的な走行操作を実施する、
ことを特徴とする方法によって解決される。
(もっと読む)
車両の制御装置
【課題】ドライバビリティの低下を招くことなく車両を目標走行路に追従させる。
【解決手段】操舵輪(FL、FR)に連結された操舵装置に操舵トルクを供給可能な操舵トルク供給手段(400)と、操舵伝達比を変化させることが可能な操舵伝達比可変手段(200、600)とを備えた車両(10)を制御する装置(100)は、車両を目標走行路に追従させるための目標状態量を設定する設定手段と、車両の状態量がこの設定された目標状態量となるように操舵伝達比可変手段を制御する第1制御手段と、前記操舵トルクとして車両を目標走行路へ追従させるにあたり操舵装置に発生する操舵反力トルクを抑制する操舵反力抑制トルクが供給されるように操舵トルク供給手段を制御する第2制御手段と、ドライバの操舵入力が生じた場合に該操舵入力に基づいて操舵反力抑制トルクを補正する補正手段とを具備する。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】車両の自動操舵制御に適用した場合に、道路の変化に応じた最適な追従性能を得ることが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに制御対象の状態量y及び状態量の時間変化率y’を収束させる。
(もっと読む)
駐車支援装置
【課題】表示手段において路面の状況を容易に把握しながら車体を目標位置において精度高く停車させ得る駐車支援装置を構成する。
【解決手段】車体を駐車目標エリアFに導入する駐車支援制御を行う際に駐車目標エリアFに最終停車目標位置Pxが設定されると、車体に備えたカメラで進行方向の路面を撮影した撮影画像をモニタ21に表示し、モニタ21に表示された撮影画像には指標Qが表示される。この指標Qは、車体が最終停車目標位置Pxに到達した際に、車体のバンパーの上側の輪郭30Eの形状に合致する形状で、最終停車目標位置Pxに対応する位置に重畳表示される。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】切り換え超平面への収束性を良好に維持しつつ、チャタリング現象を的確に低減することが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに状態量y及び状態量の時間変化率y’を収束させる。また、初期状態の制御対象の状態量y及び状態量の時間変化率y’の収束軌跡の傾きと切り換え超平面σnの傾きとの差が大きいほど値が大きくなるように境界層φを設定し、状態量y及び状態量の時間変化率y’を切り換え超平面σnに到達させるための非線形入力θnlを、境界層φにおいて減少させる。
(もっと読む)
戦闘用装置
【課題】オペレータの人的負担を軽減しながら、オペレータの認識状況や通信環境に左右されずに、瞬時の判断及び行動を実施することを可能とした戦闘用装置を提供する。
【解決手段】自律又は遠隔操縦によって走行及びミッションが実行可能な戦闘用装置であって、車両1と、車両1周辺の環境について車両環境情報を有するデータベースと、遠隔操縦を行う場所に設置された無人機エージェント、を備え、無人機エージェントは、車両環境情報に基づいて走行及びミッションについて制御方法の選択を行う車両制御機構を有する。
(もっと読む)
車両の駐車支援装置およびそれを備える電動車両
【課題】車両の外部を撮影する撮影装置による送電ユニットの認識精度を向上させて給電設備に対する車両の駐車精度を向上させる。
【解決手段】車両100の制御装置は、給電設備200と車両100との間の距離がL1よりも大きいとき、カメラ120によって撮影される画像に基づいて給電設備200の駐車枠を認識し、上記の距離がL1以下になると、送電ユニット220の側面の画像に基づいて送電ユニット220を認識し、さらに上記の距離がL2(<L1)以下になると、送電ユニット220の上面の画像に基づいて送電ユニット220を認識する。そして、制御装置は、これらの認識結果に基づいて駐車支援制御を実行する。
(もっと読む)
車線逸脱防止装置
【課題】走行車線から逸脱する傾向にある自車両を走行車線にスムースに復帰させるためのステアリング操作を的確に補助する上で有利なレーン逸脱防止装置を提供する。
【解決手段】車線逸脱判定手段38Aは自車両が走行車線から逸脱する傾向にあるか否かを判定する。修正用走行軌跡算出手段38Cは自車両が走行車線から逸脱する傾向にあると判定された場合に、自車両が走行車線の中心線に戻るために自車両が走行すべき軌跡である修正用走行軌跡を算出する。理想操舵トルク算出手段22Bは、ステアリング1402が前記の修正用走行軌跡に沿って自車両が走行するように操作された場合に操舵機構1406で発生する操舵トルクを理想操舵トルクとして算出する。第2の操舵補助トルク決定手段22Cは、ステアリング1402が操作された場合に操舵機構1406で発生する操舵トルクが理想操舵トルクに合致するように操舵補助トルクを決定する。
(もっと読む)
狭路走行支援装置、狭路走行支援方法
【課題】狭路にて右左折をする際に、運転者に対して適切なステアリング操作を直感的に促すことである。
【解決手段】走路境界までの距離yL及びyR、並びに右左折路までの距離yTに応じて、第一の閾値と、この第一の閾値よりも小さな第二の閾値とを設定する(S607、S608)。そして、右左折時旋回内側の走路境界までの距離yiが第一の閾値th1よりも短いときには(S609の判定が“Yes”)、支援トルクに対して制御介入し、走路境界への接近を抑制するための回避操作を運転者に促す(S612)。一方、右左折時旋回内側の走路境界までの距離yiが第二の閾値th2よりも短いときには(S610の判定が“No”)、支援トルクに対して制御介入し、走路境界からの離間を促進するための回避操作を運転者に促す(S613)。
(もっと読む)
駐車支援装置
【課題】運転時においても表示部に表示される予想進路線の意味を運転者に理解させることができる駐車支援装置を提供する。
【解決手段】車両に搭載され、駐車支援画像を表示する表示部Daと、表示部Daに車両の周辺を撮影した画像にステアリングの操作に連動する予想進路線を重畳した駐車支援画像が表示されている際に、駐車支援画像に代えて、車両を示す仮想車両と仮想車両に対する予想進路線である仮想予想進路線とを含む補助映像を表示部Daに表示させる補助映像制御部14を備えた。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
駐車支援装置
【課題】操作性を向上することができる駐車支援装置を提供する。
【解決手段】駐車支援装置1は、自車両10の走行を制御して駐車支援を実行するECU5を備えている。この駐車支援装置1では、ECU5により、自車両10が一定舵角で走行される一定舵角制御が実行されると共に、一定舵角制御中においてドライバによる介入操舵操作が許容される。よって、介入操作を行ったとき、駐車支援の実行に伴う切戻し自動操舵又は切増し自動操舵が発生するのを抑制できる。つまり、介入操舵操作のタイミングを適切にして介入操舵操作が駐車支援と干渉してしまうのを抑制することができる。従って、ドライバの要求に応じた駐車支援が実現可能となる。
(もっと読む)
駐車支援装置
【課題】駐車スペースに自車両を一層適切に駐車させることができる駐車支援装置を提供する。
【解決手段】駐車支援装置では、自車両10と駐車スペースSとの相対位置関係が算出され、算出された相対位置関係に基づいて自車両10の前後方向10dが駐車スペースSの前後方向Sdに沿う方向となるように操舵制御が実施される。つまり、運転者の運転と強調させた自車両10の操舵制御が行われ、駐車スペースSの前後方向Sdに対し自車両10の前後方向10dが平行になるようにして駐車されることとなる。
(もっと読む)
電動パワーステアリング装置
【課題】車載LAN経由で入力される情報に基づくパワーステアリング制御を安価な装置で実現する。
【解決手段】少なくともトルク信号TRQに基づいてモータ6に対するモータ電流指示値を決定するモータ指示電流決定手段、及びモータ電流指示値に従ってモータ電流を制御するモータ電流制御手段を含む制御装置(メインマイコン)503と、トルク信号TRQとモータ電流信号Imdから制御装置503の異常を検出し、異常を検出した場合にモータ6の駆動を制限する監視装置(サブマイコン)512とを備え、監視装置512は、異常と判断する第1の領域と、モータ電流信号Imdの増加率に基づき異常、正常を判断する第2の領域と、正常と判断する第3の領域とを持ち、トルク信号TRQとモータ電流信号Imdに基づいて第1乃至3の領域判別を行う。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、設定された横移動距離Yeに対して縦移動距離が最短となる回避を行う場合の予測回避時間teを導出するための3次元マップを用いて予測回避時間teを導出し、導出された予測回避時間te後の障害物の位置のy成分を横移動距離Yeとして設定し、設定された横移動距離Yeに対して縦移動距離が最短となる車体合成力を導出するための最短2次元マップを用いて、移動する障害物を回避するために横移動距離に対する縦移動距離が最短になる車体合成力及び回避軌道を導出する。
(もっと読む)
車両走行制御装置および車両走行制御方法
【課題】ドライバの回避操作に対応する制御介入により車両の安定性が損なわれるといった事態を抑制する。
【解決手段】車両CのリスクポテンシャルRPが第1のリスクポテンシャルRf1を超えることにより、ラップ率ヨーモーメントγrに基づいて車両Cに目標ヨーモーメントγfが付与される。また、車両CのリスクポテンシャルRPが第2のリスクポテンシャルRf2を超えることにより、舵角ヨーモーメントγsに基づいて車両Cに目標ヨーモーメントγfが付与される。
(もっと読む)
81 - 100 / 800
[ Back to top ]