
Fターム[3D232CC20]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043) | 自動走行への対応(車庫入れ機能を含む) (800)
Fターム[3D232CC20]に分類される特許
41 - 60 / 800
車両の挙動制御装置
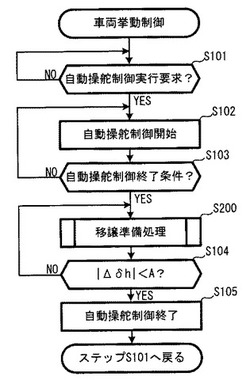
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
自動操舵制御装置及びプログラム

【課題】補償処理を行うことにより不感帯による影響を軽減することのできる車両用の自動操舵制御装置を提供する。
【解決手段】自動操舵用アクチュエータの制御信号を補償する。スムース幅smwにより変化する補償後電流iと指示電流idの傾き変化を2段階α、βとした。a’とb’点の間に傾きαの線分L1を追加し、補償値の軌跡を、i軸値a'smw'、smw'b'及びa'b'までの長さで決める。不感帯除去の程度は角度αの大きさで決まり、スムース程度は角度βの大きさで決まる。補償性能の劣化しない目標としてスムース幅smwを調整し、その後、設定定数Kによりスムースの程度を調整するので、スムース幅smwを調整しなくでも、スムースの程度を調整できる。スムース幅smwを調整することによる不感帯補償性能の劣化を避け、ふらつきを低減できる。
(もっと読む)
車両および車両制御プログラム
【課題】操舵支援を行いながら、走行経路に沿って滑らかに車両を走行させることができる車両および車両制御プログラムを提供すること。
【解決手段】推奨軌道に沿って車両1が走行するためのハンドル13の推奨ハンドル角φiを定め、実際のハンドル角φjと推奨ハンドル角φiとの差の絶対値が大きいほど、大きな補助力Fを、ハンドル13に対して、ハンドル角が推奨ハンドル角φiへ近づく方向に付与する。これにより、搭乗者は、ハンドル13を回転操作させなくても、ハンドル13に対して付与される補助力Fの方向および大きさから、推奨ハンドル角φiへと近づけるためにハンドル13を操作すべき方向やハンドルの操作量を容易に把握できる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者が指示した方向に車両を自動で走行させつつ、搭乗者の指示に基づいて走行経路が選択されたタイミングとその選択された走行経路とを搭乗者に確実に把握させることができる車両および車両制御プログラムを提供すること。
【解決手段】走行制御装置100は、搭乗者により傾倒操作されたジョイスティック装置13の操作レバー13aの傾倒方向から、搭乗者が希望する車両1の進行すべき方向を判断し、車両1を進行させる走行軌道を設定する。そして、走行軌道が設定された直後、操作レバー13aを傾倒させ、その傾倒方向を、設定された走行軌道によって車両1が進行していく方向にする。これにより、搭乗者は、操作レバー13aの動きにより、指示によって走行軌道が選択されて設定されたこと、及び、選択された走行軌道によって車両1が進む方向を、確実に把握することができる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】車両の搭乗者による回転操作によって車両の操舵方向が指示されるステアリングホイール13が設けられており、新たな走行軌道を選択して設定すべき判定エリアに車両1が位置した場合は、搭乗者によるステアリングホイール13の回転操作に基づいて、車両1が操舵され(S5)、その車両1の操舵に基づいて実際に車両1に発生したヨーレートを用いて所定時間後の車両位置を第1車両位置予測処理(S7)により予測する。これにより、車両1が走行している路面の傾きに左右されることなく、搭乗者の進行したい方向を正確に把握できる。よって、搭乗者の進行したい方向を正確に汲み取りながら走行軌道を選択して自動走行を行うことができる。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバの視線と走行路との交点に到達するまでの時間が小さい状況における車両軌跡追従特性のダンピンの悪化を改善し、軌跡追従特性に優れた車両運動を実現する。
【解決手段】注視時間算出部30で、内向きカメラ12で撮像されたドライバの顔画像、外向きカメラ14で撮像された車両前方画像、及び車速センサ16で検出された車速Vに基づいて、注視時間Tを算出し、注視時間判定部32で、注視時間Tが予め定めた閾値Tthより小さいか否かを判定し、T<Tthの場合には、ダンピング変更部36で、ヨー角検出部34で検出された自車両のヨー角θと目標軌跡のヨー角θdとの差と、予め定めたダンピング特性とフィードバックゲインkp1との関係を示すテーブルに基づいて取得された必要なダンピング特性を得るためのkp1との積で表される偏差フィードバックδf_addを算出し、前輪舵角装置20へ出力する。
(もっと読む)
車両、自動駐車支援設備および自動駐車システム
【課題】天候や時間帯に関わらず車両を駐車スペースに精度よく誘導する。
【解決手段】車両の制御装置180は、駐車スペースに車両を自動駐車させる自動駐車制御を実行する自動駐車制御部181を含む。駐車スペースの周囲には、入口側が開口され、入口側から奥に向かって左右の間隔が狭くなるように配置されるガイド棒が設けられる。自動駐車制御部181は、当接判定部181Bと、ステアリング制御部181Cとを含む。当接判定部181Bは、自動駐車制御の実行中、タイヤ空気圧情報に基づいて各タイヤがガイド棒に当接したか否かを判定する。ステアリング制御部181Cは、当接判定部181Bによっていずれかのタイヤがガイド棒へ当接したと判定された場合、そのタイヤとガイド棒との当接を回避するように、ステアリングの自動制御を行なう。
(もっと読む)
車両の走行制御装置
【課題】車両挙動が安定した状態で且つドライバに違和感、不快感又は不安感を与えることなく軌跡制御を開始又は再開する。
【解決手段】車両の軌跡を該車両の運転者による操舵入力と無関係に変化させることが可能な軌跡可変装置を備えた車両における走行制御装置は、前記車両の軌跡が目標軌跡となるように前記軌跡可変装置を制御する軌跡制御手段と、前記車両の操舵速度を検出する操舵速度検出手段と、前記検出された操舵速度が、基準時間以上の期間について基準速度以下である場合において、前記軌跡制御手段による前記目標軌跡に応じた軌跡制御の実行を許可する許可手段と、車速が高い程低くなるように前記基準速度を設定すると共に車速が高い程長くなるように前記基準時間を設定する設定手段とを具備する。
(もっと読む)
運転者状態推定装置
【課題】 運転者の注意状態を精度よく判定することを可能とした運転操作状態推定装置を提供する。
【解決手段】 車両の走行状態と運転者の操作状態に基づいて、前方注視点における目標コースからのずれである前方偏差εと修正操舵角δとの関係を途中1カ所で傾きの変化を許容する屈曲線(図においては、ε≧0では、δ=k1×ε、ε<0では、δ=k2×ε)で近似し、この修正操舵角と実操舵角との関係から運転者の意識状態を判定する。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
MDPSの自動フルターン作動制御方法
【課題】Uターンまたはフルターン時に操舵力を最小にすることができ、自動フルターンによってユーザの便宜性を増大することができるMDPSの自動フルターン作動制御方法を提供する。
【解決手段】本発明のMDPSの自動フルターン作動制御方法は、MDPSの自動フルターン作動条件を満たすか否かを判断する段階、MDPSの自動フルターン作動条件を満たす場合、MDPSをフルターンで操向する段階、MDPSの自動フルターン解除条件を満たすか否かを判断する段階、およびMDPSの自動フルターン解除条件を満たす場合、MDPSの自動フルターンを解除する段階を含み、MDPSの自動フルターン作動条件を満たすか否かを判断する段階は、MDPSの作動が正常であるかを判断する段階を含むことを特徴とする。
(もっと読む)
走行支援装置
【課題】走行支援のための走行経路の演算を容易にし、計算コストを抑制する。
【解決手段】車両進行方向の周辺環境を認識し、認識した周辺環境に対する自車位置と自車姿勢を検出し、これら周辺環境、自車位置、及び自車姿勢を対応付けた情報を予め蓄積しておく。そして、蓄積された情報を自車位置に基づいて参照することで、自車両にとって走行可能な複数の走行経路を参照経路として設定すると共に、自車位置と自車姿勢に基づいて、自車位置から各参照経路に至るまでの導入経路を算出する。そして、導入経路の算出結果に応じて、複数の参照経路のうちの一つを選択し、選択した一つの参照経路と、この参照経路に至るまでの導入経路とを合わせて最終的な自車両の走行経路を設定する。
(もっと読む)
移動体の操舵反力調整装置
【課題】運転者の疲労状態により適した操舵反力に近づくように当該操舵反力を調整可能とすることを目的とする。
【解決手段】操舵反力用コントローラ6は、筋力検出部11と、疲労推定部12と、反力調整部13とを備える。筋力検出部11は、筋骨格モデルとアドミタンス計測手法をもちいて、運転者の肩部から手までに位置する腕の筋肉のうちから選択した複数の筋の筋力を推定する。そして、推定した複数の筋の疲労度と操作子の操舵状態とに基づき、操作子に付加する操舵反力を調整する。
(もっと読む)
操舵装置
【課題】例えばスラント路を車両が直進走行する際、運転者の知覚特性に適合した操舵制御を行う。
【解決手段】操舵装置は、運転者が操舵ハンドルを操作する操作量に基づいて、車両が走行する道路の道路幅を特定する第1特定手段と、道路の道路幅方向の傾きを特定する第2特定手段と、特定された道路幅と特定された傾きとに基づいて、運転者による車両の操舵をアシストするためのアシストトルクを制御する制御手段とを備える。
(もっと読む)
自動制御装置
【課題】操作者の意思に反して自動制御が解除されてしまうことを抑制できる自動制御装置を提供する。
【解決手段】自動制動制御手段11は、制動装置20を制御することで自動的に制動力を発生させる自動制動制御を行う。制御解除手段12は、自動制動制御中にアクセルペダル操作量が所定量以上となったと判定したことに基づいて、自動制動制御を解除させるための解除信号を自動制動制御手段11に出力する。ただし、自動制動制御中に運転者がアクセルペダル40を所定量以上踏み込んでしまった場合であっても、誤操作判定手段13により、そのアクセルペダル操作が誤操作であると判定された場合には、制御解除手段12は解除信号を自動制動制御手段11へ出力しない。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
(もっと読む)
車両運動制御装置
【課題】より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定する。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させる。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
(もっと読む)
41 - 60 / 800
[ Back to top ]