
Fターム[3D232CC20]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043) | 自動走行への対応(車庫入れ機能を含む) (800)
Fターム[3D232CC20]に分類される特許
61 - 80 / 800
車両運動制御装置およびそれを有する車両運動制御システム
【課題】制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をアベイラビリティ演算部5から制御要求部1に対して伝える。これにより、各アプリケーションでアベイラビリティ情報を踏まえて、性能限界を超えない制御要求を生成することが可能となり、制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することが可能となる。
(もっと読む)
車両の横方向運動制御装置

【課題】 横方向運動制御中にドライバの操舵意図の有無を精度良く判断する。
【解決手段】 横方向運動制御装置は、車両のドライバの操舵意図の有無を判断する操舵意図判断部を備え、操舵意図判断部により操舵意図が有ると判断されたときに、制御対象制御部による制御対象の制御を停止する。また、操舵意図判断部は、車両のドライバによる操舵操作量を取得する操舵状態量取得部と、目標値に基づいて操舵操作量の閾値を設定する閾値設定部と、を備える。操舵意図判断部は、操舵操作量取得部により取得された操舵操作量の大きさと閾値設定部により設定された閾値とを比較することにより、操舵意図の有無を判断する。
(もっと読む)
車両運動制御装置
【課題】より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定する。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させる。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
(もっと読む)
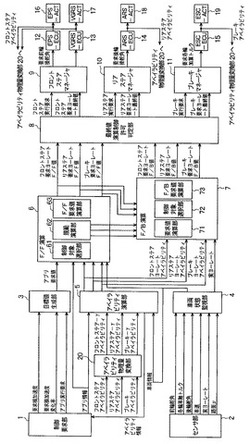
車両運動制御システム
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
油圧式パワーステアリング装置
【課題】アシスト力の制御の自由度が高い油圧式パワーステアリング装置を提供する。
【解決手段】油圧式パワーステアリング装置1は、転舵シャフト16に設けられたピストン42によりその内部が第1油圧室43及び第2油圧室44に区画される油圧シリンダ21と、この油圧シリンダ21に作動油を供給する可変容量式の電動ポンプ22とを備えている。そして、第1油圧室43及び第2油圧室44に対する作動油の給排を切替可能な切替弁23と、トルクセンサ32、操舵角センサ33及び車速センサ34と、各センサ32〜34の検出結果に基づいて油圧シリンダ21に作動油を給排する際の給排態様を設定し、その設定された給排態様に応じて切替弁23の切替位置と電動ポンプ22の作動油供給量を制御するECU31とを含む。
(もっと読む)
走行制御装置
【課題】車両を目標位置まで自律走行させる場合に、車両が目標位置へ到着する可能性を向上させることができる走行制御装置を提供すること。
【解決手段】走行制御装置100は、車両1の走行中に、前回の補正が行われた時に設定された直線距離daと、現在の車両1の車両位置から目標とする駐車位置Oまでの直線距離dnとを比較し、直線距離dnが直線距離daよりも短くなる場合に、目標とする駐車位置Oの再認識を試みる。これにより、車両1が目標位置Oに近づく度に、目標とする駐車位置Oを再認識できるので、再認識された駐車位置O’に含まれる誤差を徐々に(段階的に)低下させることができる。よって、目標とする駐車位置Oの特定精度を徐々に(段階的に)向上させることができるので、車両1が目標とする駐車位置Oに到着する可能性を向上させることができる。
(もっと読む)
走行支援装置及び方法
【課題】車輌を走路内で走行させるように補助を行う際の車輌の操舵と車速の減速との調和を図り、車輌を安定的に走行させる技術を提供する。
【解決手段】車線境界を示す道路標示又は走行不可域を基準にして車輌の走行可能な走路を設定し、当該走路からの車輌逸脱時に、車輌を走路内で走行させるように補助を行う走行支援装置であって、車輌が走路を超えないための目標ヨーレートYtrgよりも実際のヨーレートYreaが小さい場合にその差△Yに応じて、車輌を走路内で走行させるように補助を行う際の車輌の操舵と車速の減速とを個別に制御する。
(もっと読む)
先行車両追従支援装置
【課題】先行車両を追従するためのステアリングホイールの目標ステアリング操舵角を運転者に提示し、先行車両に安定して追従させる。
【解決手段】先行車両と自車両との相対位置を検出する先行車両検出手段6と、自車両の車速を検出する車速検出手段7と、先行車両と自車両とが同一の円の円周上に位置するとして、先行車両検出手段6により検出された相対位置情報から円の回転半径を演算し、予め設定されたマップを用いて車速検出手段7により検出された車速と回転半径とから先行車両に追従するためのステアリングホイール3の目標ステアリング操舵角を演算する目標操舵角演算手段9と、目標操舵角演算手段9により演算された目標ステアリング操舵角を提示する目標操舵角提示手段10とを備える。
(もっと読む)
車両の操作状態判定システム
【課題】本発明は、車両の操作状態判定システムにおいて、運転者の意図的な運転操作をより正確に判別することを課題とする。
【解決手段】本発明は、上記した課題を解決するために、車輪の転舵角またはステアリングホイールの操舵角が変化したときに、操舵装置に入力されるトルクがピークに到達した後に閾値Tb以上の大きさを維持する時間が基準時間tbase以上であることを条件に、車輪の転舵角の変化が運転者の意図的な操舵に因ると判定するようにした。
(もっと読む)
移植機
【課題】電動ステアリング機構と、電動ステアリング機構を介した操向制御を行う制御部を備え、直進走行後に走行機体を旋回させるための操向操作を自動的に行う自動旋回制御を行うにあたり、オペレータの意図に沿って自動旋回制御を実行する移植機を提供することを課題とする。
【解決手段】本発明は、電動ステアリング機構34と、電動ステアリング機構34を介した操向制御を行う制御部21とを備え、制御部21が、直進走行後に走行機体4を旋回させるための操向操作を自動的に行う自動旋回制御を行う移植機であって、走行機体4の旋回方向を選択する操作を検出する操作検出手段を設け、制御部21は、操作検出手段によって旋回方向の選択操作が検出されたことを少なくとも1つの条件とし、畦際での旋回である小回り旋回が可能な切れ角になるまで該選択された旋回方向に電動ステアリング機構34を自動的に操向作動させる自動旋回制御を実行する。
(もっと読む)
走行軌跡作成装置
【課題】見通しの悪いカーブ路を車両が走行する場合であっても、燃費の悪化を抑制することができる走行軌跡作成装置を提供する。
【解決手段】車両1の走行軌跡を作成する走行軌跡作成装置10において、カーブ路の入口部32から出口部34までの形状を認識するカーブ路形状認識手段11と、カーブ路内における、出口部34を見通す地点40を特定する出口部見通し地点特定手段12と、入口部32から出口部見通し地点40及び出口部見通し地点40から出口部34までの車両1の走行軌跡を作成する走行軌跡作成手段13と、を備えること、を特徴とする走行軌跡作成装置10。
(もっと読む)
電動パワーステアリング装置
【課題】外乱の存在する環境下においても走行軌跡の乱れを抑えて円滑に自動制御を実行することのできる電動パワーステアリング装置を提供すること。
【解決手段】ECUは、二系統の独立したモータコイルに対応して設けられた二つの駆動回路26A,26Bと、これら各駆動回路26A,26Bに対して二系統の独立した制御信号Smc_a,Smc_bを出力するマイコン27とを備える。マイコン27は、アシスト力に対応したモータトルクを発生させるべく、電流制御を実行することにより第1系統の駆動回路26Aに対して制御信号Smc_aを出力する第1制御信号出力部31Aを備える。そして、更に、転舵輪の舵角を変更すべく車内ネットワークを介して上位ECUから入力される操舵角指令値θs*に基づいて、位置制御を実行することにより第2系統の駆動回路26Bに対して制御信号Smc_bを出力する第2制御信号出力部31Bを備える。
(もっと読む)
自動運転車両制御装置
【課題】自動運転から手動運転への自動での切り替えを可能とする自動運転車両制御装置を提供することを課題とする。
【解決手段】ドライバがオーバーライドした場合に自動運転から手動運転に切り替える自動運転車両を制御する自動運転車両制御装置1であって、自動運転の目標進路を生成する目標進路生成手段30と、自動運転の目標進路又はドライバによる運転操作に基づいて車両を制御する車両制御手段32と、実際の車両進路と自動運転の目標進路とを比較する進路比較手段31と、ドライバのオーバーライドを検出するオーバーライド検出手段12と、手動運転時に進路比較手段31で比較した進路の差が閾値未満でありかつオーバーライド検出手段12でドライバのオーバーライドが検出されていない場合に手動運転から自動運転に切り替える切替手段32とを備えることを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、できるだけ車両を目標軌跡に沿って走行させつつ、運転者が操舵操作の際に操舵伝達比の変化に起因して覚える違和感を低減する。
【解決手段】舵角可変装置又はバイワイヤ式の操舵装置と、走行路の情報を取得する装置とを備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S200、300)、運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための操舵輪の目標舵角を演算し(S400)、目標舵角に基づいて操舵輪の舵角を制御する(S600)。特に運転者の操舵操作による操舵輪の舵角の変化方向が目標舵角に基づく操舵輪の舵角の変化方向とは逆の方向であるときには、操舵伝達比が大きくなるよう目標舵角を修正する(S400)。
(もっと読む)
目標軌道算出装置
【課題】直線と円弧を用いた簡単な軌道計画手法で障害物を回避した目標軌道を求める。
【解決手段】カメラ撮影部2の撮影で検出される障害物αが2円軌道モデルで算出された目標軌道に存在する場合に、軌道計算部5により、例えば目標位置の延長線上に仮位置を設け、開始位置と仮位置の円の円弧及び両円の接線の直線により、障害物を回避するように修正された修正軌道を算出して決定し、障害物αを回避して車両1の自動駐車等を行なう。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
駐車支援システム
【課題】駐車支援システムにおいて、駐車支援の際に、運転者の衣類がステアリングホイールに巻きついたり、ステアリングホイールが運転者の手にぶつかったりする等の予期せぬ事態が発生するおそれをなくすることにある。
【解決手段】ステアリングホイール(7)と操舵輪(15L、15R)とが機械的に切り離され、ステアリングホイール(7)の回転に応じて操舵輪(15L、15R)を操舵する操舵モータ(22、23)を備えたステアバイワイヤシステム(2)であり、自動駐車手段(31)の実行中には、操舵モータ(22、23)により操舵輪(15L、15R)が操舵されてもステアリングホイール(7)は中立位置にある。
(もっと読む)
操舵制御装置
【課題】道路状態や走行状態に応じた目標舵角を設定し、この目標舵角に近づくように操舵反力トルクの制御や、自動操舵の制御時、ドライバの操舵による負担を低減する操舵制御装置を提供する。
【解決手段】操向輪の転舵角と走行路形状に応じた転舵角である目標転舵角との差が小さくなる方向に、操向輪の転舵角が変化しているときには、操舵量に対して転舵量が大きくなるようにする。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則し且つ走行路に適合する目標軌跡になるよう操舵輪の舵角を制御する。
【解決手段】舵角可変装置14又はバイワイヤ式の操舵装置96と、走行路の情報を取得する装置58とを備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S200、300)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための操舵輪の目標舵角を演算する(S500)。目標到達位置が走行路の所定の範囲内にないときには目標到達位置が走行路の所定の範囲内になるよう目標舵角を補正する。そして目標舵角に基づいて操舵輪の舵角を制御する(S600)。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回状態量が過大になることを防止しつつ、車両の軌跡が運転者の希望に則した目標軌跡になるよう前輪及び後輪の舵角を制御する。
【解決手段】前舵角可変装置14又はバイワイヤ式の操舵装置96と、後輪操舵装置60とを備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定した時点に於ける運転者の操舵操作量及び車速に基づいて前輪の暫定の目標舵角を演算し、暫定の目標舵角に基づいて車両の旋回状態量を推定する(S350〜500)。旋回状態量の大きさが基準値を越えないときには暫定の目標舵角に基づいて前輪の舵角を制御する。旋回状態量の大きさが基準値を越えるときには基準値を越えないよう補正された旋回状態量に基づいて前輪及び後輪の目標舵角を演算し、目標舵角に基づいて前輪及び後輪の舵角を制御する(S600)。
(もっと読む)
61 - 80 / 800
[ Back to top ]