
Fターム[3D232DA03]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角 (3,968) | ハンドル操舵角 (2,938)
Fターム[3D232DA03]に分類される特許
2,921 - 2,938 / 2,938
車両用ステアリングシステム
本発明は、車両用ステアリングシステム(2)、特に油圧作動のパワーステアリングシステムに関するもので、当該システムは、ステアリング部材(3)の一端を第1回転要素(6)を用いてステアリングバルブのロータリースライドバルブまたはロータリーピストン(4)に接続しているステアリングシャフト(2)を備えている。このステアリングシステム(1)は、ステアリング機構の(9)の出力要素(8)を作動させる油圧サーボモータ(7)と、油圧サーボモータ(7)の作動空間内での高圧媒体の流れを制御するステアリングバルブ(5)と、電動サーボモータ(10)によってさらに作動される出力要素(8)と、を備えている。本発明は、安全性を内包した油圧サーボモータが機械式ステアリング部材と電動サーボモータとの両方によって支援されるステアリングシステムを提供することを目的としている。このため、電動サーボモータ(10)とステアリングシャフト(2)は、第1回転要素(6)とロータリースライドバルブまたはロータリーピストン(4)との間に位置する共通回転要素(11)上で作動する。  (もっと読む)
(もっと読む)
自動車の操舵車輪の操舵支援方法及び操舵支援装置
本発明は、自動車(1)の操舵車輪(3、4)の操舵支援方法及び操舵支援装置に関する。本発明の自動車(1)の操舵車輪(3、4)の操舵支援方法及び操舵支援装置は、自動車(1)の運転者によるステアリングホイール(8)の操作に対する自動車(1)の応答時間を短縮するために、ステアリングホイール(8)とラック部品(14)との間に、位相進度が適用されることを特徴とする。
 (もっと読む)
(もっと読む)
バイラテラルサーボ制御装置
従来の力帰還型あるいは並列型バイラテラルサーボ構成に必要なマスタの位置(回転運動においては角度)センサと力(回転運動においてはトルク)センサを互いに冗長センサとして使用する。力帰還型あるいは並列型バイラテラルサーボにおいて、故障したセンサを他のセンサにより代替してスレーブの目標位置(角度)を決定することができるため、制御動作を継続することができる。また、本来はバイラテラルサーボのために備えたセンサを冗長センサの代わりに活用するので、より低いセンサの冗長度で所定の信頼度を有する制御装置が実現可能となる。 (もっと読む)
動力操縦システム
【課題】
最適な運転者支援と同時に操縦快適性とを保証する操縦システムと方法を提供すること【解決手段】
動力操縦システムは、追加操縦トルクを積極的に印加する手段と、同時に重畳操縦角度を積極的に印加する手段とを有する。  (もっと読む)
(もっと読む)
自動車の後輪の操舵制御装置
本発明は、自動車の特性に応じて、前輪(3、4)と逆相または同相の位置に、自動車の後輪(5、6)を操舵可能な、自動車の後輪の操舵制御装置(10)に関する。本発明は、自動車の後輪の操舵制御装置が、中央制御装置(11)を含み、この中央制御装置(11)の中で、低速ブロック(20)が、自動車が後進中であるか、あるいはどのギヤ比にも係合されないで走行中であるときに、後輪の操舵角度(A_ar)を計算することを特徴とする。
 (もっと読む)
(もっと読む)
操舵可能な後輪の操舵角度の制御方法及びシステム並びに対応する車両
本発明は、少なくとも3つの操舵可能な車輪を有する車両(1)のための、操舵可能な後輪(5)の操舵角度の制御方法およびシステム(10)並びにこのようなシステムが搭載された車両に関する。本発明の操舵可能な後輪(5)の操舵角度の制御方法およびシステム(10)においては、前輪(3)の操舵角度と、車両(1)の移動データと、後輪(5)の操舵角度の前の設定点との関数として、後輪(5)の操舵角度の現在の設定点が設定される。
 (もっと読む)
(もっと読む)
車両を安定化させる際に車両操作者を支援するための方法及び装置
この発明は、目標操舵角と瞬間的な操舵角の間の偏差に応じて決まる追加操舵トルクを車両の操舵系統に加える形で、車両の操舵可能な車輪の目標操舵角を調節して、車両を安定化させる際に車両操作者を支援する方法に関する。この方法は、車両の操舵系統に作用する負荷モーメントの値を見積もることと、この負荷モーメントに関する見積値に応じて、追加操舵トルクを算出することとを特徴とする。更に、この発明は、この方法を実施するのに適した装置に関する。  (もっと読む)
(もっと読む)
ステアリングシステム
車輌用のラックアンドピニオン式ステアリングギアはハウジング(2)と、ハウジング内で第1軸線(14)の周りに回転可能なピニオン(1)と、ハウジングに対して横変位可能なラック(7)と、ピニオン(1)とラック(7)との間に介挿され、それぞれに噛合し、第2軸線(9)の周りに回転可能な中間ギア(8)とを具える。第2軸線(9)は、作動機構によって、少なくとも1つの車輌のパラメータに応じて、ハウジングに対して横移動可能であり、これにより、その車輌のパラメータに応じて、ピニオンの角変位と、ラックの横変位との間の関係が変化する。
 (もっと読む)
(もっと読む)
車両を安定化させる際に車両操作者を支援するための方法及び装置
この発明は、車両を安定化させる際に、車両の操舵系統に追加操舵トルクを加えて、車両操作者を支援する方法に関する。この方法は、車両の操舵可能な車輪における瞬間的な操舵角と目標操舵角の間の操舵角偏差に応じて、追加操舵トルクの第一の成分を求め、その場合に、車両のヨーレイトの瞬間的な値と基準ヨーレイトの値の間の偏差に応じて、この操舵角偏差を求めるとともに、車両モデルにおける運転者が設定する少なくとも一つの変量の値に応じて、この基準ヨーレイトの値を計算することを特徴とする。更に、この発明は、この方法を実施するのに適した装置に関する。  (もっと読む)
(もっと読む)
運動エネルギーおよび横加速度を使用する車両転覆防止モニタ
車両の転覆事象を検出する方法を提供する。車両の横運動エネルギーが、車両縦速度および車両横滑り角に応答して判定される。車両の横加速度が、測定される。転覆潜在力インデックスが、横運動エネルギーおよび横加速度に応答して判定される。転覆インデックスが、横加速度の係数によって転覆潜在力インデックスに重みを付けることによって判定される。比較を行って、転覆インデックスが所定の閾値を超えるかどうか判定する。  (もっと読む)
(もっと読む)
アクティブな車線維持支援装置
本発明は、車両運転者の状態を監視するために使用される方法に関する。車両が走行する車道区分線(3)が検知され、走行方向が決定され、車両は車線にとどまるために、前記車線を進まなければならない。車両運転者は、車線にとどまるために、ハンドルの自動センタリングによって支援される。車両が所定の時間にわたって決定された走行方向を正確に進む場合には、これは、運転者が積極的に車両のかじを取っていないというサインであり、警告信号が発せられる。  (もっと読む)
(もっと読む)
自動車の補助力支援式操舵システム
本発明は、操舵ギヤ装置と累積ユニットとを備えた、自動車の補助力支援式操舵システムに関し、前記操舵ギヤ装置が、運転者によりこの運転者の操舵ハンドルを用いて設定された操舵要望を、操舵可能な車輪に付設されているタイロッドのスライド運動に転換するためのものであり、また前記累積ユニットを用い、運転者により設定された操舵角度に対し、同方向の又は反対方向の追加・操舵角度が付加され得て、それにより、運転者の操舵角度設定値と操舵ギヤ装置におけるタイロッド・枢着点の行程との間のギヤ比が、操舵ギヤ装置により設定されているギヤ比に対して変更可能である。本発明に従い、補助力支援機構を提供するシステムのための出力・限界値(又は操舵角度設定値のための限界値)の超過により、少なくとも時間的な見方のもと、運転者の操舵角度設定値と、操舵ギヤ装置におけるタイロッド・枢着点の行程との間のギヤ比が、設定されているギヤ比に対し、よりインダイレクトに調節されること。累積ユニットが、運転者・操舵角度に対し、反対方向の追加・操舵角度を付加し、それにより、タイロッド・枢着点の移動速度が減少される、又は、タイロッド・枢着点の行程が時間遅延されて運転者の操舵角度設定値に追従してゆく。  (もっと読む)
(もっと読む)
転覆安定化のための方法およびビークルダイナミクス制御システム

【課題】 車両の積載状態、転覆傾向を評価し、転覆安定化アルゴリズムの枠組みで考慮できる、車両の転覆安定化のための方法およびビークルダイナミクス制御システムを提供する。
【解決手段】 車両を安定化させるために、転覆安定化アルゴリズム(4、5、8)が限界的状況でアクチュエータ(3、9、10)を用いて走行運転中に介入する、限界的走行状況の下での車両の転覆安定化のための方法において、車両重量(m)並びに特性速度(vch)とタイヤ接地荷重の比(FNl/FNr)が求められ、且つ転覆安定化アルゴリズム(4、5、8)が車両重量(m)或いは推定された車両重心(hsp)に依存して実行されることによって、車両の様々な積載状態が考慮される。
(もっと読む)
重畳ステアリング装置を備えた車両のステアリング方法
重畳ステアリングシステムを備えた車両のステアリング方法であって、ドライバーによって与えられるステアリング角及び追加の角度(付加ステアリング角)を算出するとともに、その結果として得られるステアリング角を設定するために、この与えられたステアリング角に対して、重畳アクチュエーターを用いて、特に電動モーターを用いて、かつ重畳伝動装置を介して、別の値、特に走行動特性に関する値に応じて、この付加ステアリング角を重畳することが可能である方法において、このステアリングシステムの結果として得られるステアリング角にもとづき、並びにこの付加ステアリング角に直接的に依存する、或いはこの付加ステアリング角を表す値にもとづき、この重畳伝動装置の伝動装置入力角
【数1】
(53)に関する値を算出することを特徴とする方法。  (もっと読む)
(もっと読む)
運転者の行動解釈に基づいて自動車のサブシステムを制御する方法および機構

本発明は、自動車の運転のためのタスクに対する運転者の不注意レベルの検出に依存する、自動車のサブシステムを制御するシステムおよび方法に関する。可変特性は、運転者の不注意と相関し、実質的に実時間に基づいて、測定される。不注意のレベルは、少なくとも部分的に、測定に基づいて評価される。クルーズコントロールや車線維持支援のような自動車のサブシステムの動作は、それに基づいて、前記自動車の動作が運転者の現在の不注意レベルに適切に合致することを保証するように、調整される。前記サブシステムの動作は、運転者の不注意レベルが増加すると本質的に危険性を増す走行条件が確立されることを防ぎまたは回避するように制御される。 (もっと読む)
チルト調節装置及び車両のチルトを調節する方法
本発明は、車両(10)のロール角速度を示す信号(κ’)を検出すると共に、設定舵取り角信号(δLset)を検出する検出手段と、前記ロール角速度信号(κ’)及び設定舵取り角信号(δLset)に基づいて舵取り信号(δL)を発生する調節手段(21,29,30)とを備え、加えて、車両(10)の少なくとも一つの軸の一つ以上の車輪(11)の舵取りを行うために、舵取りアクチュエータ(15)に舵取り信号(δL)を出力する出力手段(31)を備える車両(10)用のチルト調節装置(16)に関する。本発明によれば、チルト調節装置(16)は、車両(10)が少なくとも一時的にシングルトラック走行モードに保持されるように、舵取り信号(δL)によって舵取りアクチュエータ(15)を制御する。 (もっと読む)
スーパーインポーズステアリング
運転者によって入力される操舵角に、必要な場合に別の角度をスーパーインポーズすることができるスーパーインポーズステアリング(1)において、スーパーインポーズステアリングのスーパーインポーズ機能が、個々に操作可能な構造群(16,17,21)によって実現される。  (もっと読む)
(もっと読む)
自動車内における運転者の負荷を調整するための方法及び装置
本発明は、自動車を運転中の運転者の負荷を調整するための方法であって、負荷の値がセンサによって記録された運転者の生理的データから決定される方法、及び前記方法を実行するための装置に関する。本発明によれば、運転者の負荷、すなわち、運転負荷は、最適な運転負荷範囲に維持され、又は前記最適な範囲から外れたときには、そこに戻され、これによって、運転者の最適な動作能レベル又は注意レベルを保証する。すなわち、車両システムは、決定された運転負荷値に依存して制御され、これによって、運転者は、視覚的、聴覚的、又は触知的センサによって、前記運転者の運転負荷値が最適な運転負荷範囲内の値に維持される。 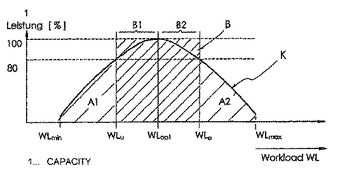 (もっと読む)
(もっと読む)
2,921 - 2,938 / 2,938
[ Back to top ]