
Fターム[3D232DA62]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 電動機状態量 (3,403) | モータトルク (51)
Fターム[3D232DA62]に分類される特許
1 - 20 / 51
車線維持支援装置
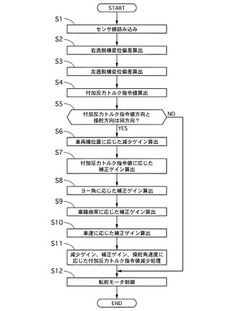
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
電動パワーステアリング装置

【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
電動モータユニットの検査装置及び検査方法
【課題】モータ制御装置と電動モータが一体となった組込みユニットに対応し、精度が高い電動モータの良否判定を行う。
【解決手段】電動モータユニット10に入力される入力トルク信号を取得し、電動モータMの出力トルクを検出し、電動モータMの温度を検出し、検出された電動モータMの出力トルクを温度で補正し、温度補正された電動モータMの出力トルクの、入力トルクに対する関係を、あらかじめ用意した電動モータの出力トルクの入力トルクに対する基準関係に近づけるように、電動モータユニット10内で電動モータMに供給されるモータ電流を補正する。このために補正に必要な値をEEPROM19に書き込む。
(もっと読む)
車両の横方向運動制御装置
【課題】 横方向運動制御中にドライバの操舵意図の有無を精度良く判断する。
【解決手段】 横方向運動制御装置は、車両のドライバの操舵意図の有無を判断する操舵意図判断部を備え、操舵意図判断部により操舵意図が有ると判断されたときに、制御対象制御部による制御対象の制御を停止する。また、操舵意図判断部は、車両のドライバによる操舵操作量を取得する操舵状態量取得部と、目標値に基づいて操舵操作量の閾値を設定する閾値設定部と、を備える。操舵意図判断部は、操舵操作量取得部により取得された操舵操作量の大きさと閾値設定部により設定された閾値とを比較することにより、操舵意図の有無を判断する。
(もっと読む)
車両用操舵装置および車両用操舵装置の伝達比判定方法
【課題】ロック機構が伝達比を固定していないにも拘わらず伝達比が固定されていることを判定できる車両用操舵装置を提供する。
【解決手段】車両用操舵装置1は、伝達比可変機構13と、伝達比制御モータ14と、伝達比を固定するためのロック機構25と、反力補償モータ15と、制御部とを備える。ロック機構25は、キャリア57の回転を規制するためのロック部材62と、ロック部材62をキャリア57に係合する第1位置P1と係合しない第2位置P2とに変位可能に支持するソレノイド61と、を含む。制御部の第1判定部は、ロック部材62によって伝達比が固定されておらず、且つ伝達比制御モータ14のロータ14aが第1所定角度θa1回転された場合において、反力補償モータ15用の第2レゾルバ32の検出値θb1と第1所定角度θa1との差が所定角度以下のとき、伝達比が固定されていると判定する。
(もっと読む)
パワーステアリングシステムの操作のための方法
本発明は、パワーステアリングシステム(10)を操作するための方法と、そのようなパワーステアリングシステム(10)と、に関する。本発明による方法では、運転者により与えられたマニュアルトルク(24)が、重畳ユニット(14)内でモータ(16)によって提供されたモータトルク(26)に重ね合わされる。本発明によれば、パワーステアリングシステム(10)の障害は、モータ(16)のスピードパターンを評価することによって検知され得る。  (もっと読む)
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の補助を行うこと。
【解決手段】車輪と車体との間に介在された能動型のサスペンション装置と、車両周囲の障害物を検出する障害物検出手段と、障害物検出手段によって検出した障害物の種類を判別する障害物判別手段と、障害物判別手段の判別結果に基づいて、傾斜角を有する仮想路面を設定する仮想路面設定手段と、仮想路面設定手段によって設定した仮想路面の傾斜角と対応させて、能動型のサスペンション装置を制御し、車体を傾斜させる車体制御手段と、障害物検出手段によって検出した障害物への接近度合いに応じて、操舵反力を制御する操舵反力制御手段とを備える。
(もっと読む)
ステアリングギヤ上に作用する力の決定
ステアリングリンケージを介して自動車のステアリング装置のステアリングギヤ上に外部から作用する力(Fz)を、推定器(21)を用いて決定する可能性が提供される。ステアリングトルクを発生するためのモータが、当該ステアリング装置に割り当てられている。これは、外部から作用する力(Fz)が実効モータトルク(tor_RAeff)に依存して推定され、当該実効モータトルク(tor_RAeff)がモータトルク及び効率に依存して決定され、当該効率が推定された力(Fz)に依存して決定される、ということによって達成される。  (もっと読む)
(もっと読む)
ステアリング装置における車輪操舵角度およびハンドトルクの調整
外的影響に対して極力不感であるステアリング装置(2)用動作様式を提供し、角度調節器およびトルク調節器によって目標車輪操舵角度および目標ハンドトルクを調整するのに不可欠な作動エネルギーを極力効率的に利用するために、目標車輪操舵角度と目標ハンドトルクを多変量制御器(20)に供給し、前記ハンドトルク(T)と前記車輪操舵角度(A)を前記多変量制御器(20)によって制御することが提案される。  (もっと読む)
(もっと読む)
操舵負荷推定装置及び電動パワーステアリング装置
【課題】操舵負荷からヒステリシス特性を精度良く除去すること。
【解決手段】操舵輪を直進状態から転舵させようとする操舵トルクに基づいて推定される操舵負荷Txには、主にギヤロスに起因してヒステリシス特性が含まれる。このギヤロスの大きさは、操舵トルクの大きさに依存して変化し、操舵トルクが大きくなるほど、ギヤロスの大きさも大きくなる。そこで、推定操舵負荷Txに所定比率の係数を乗じることによって、補正値を求める。従って、補正値は、推定操舵負荷Txが大きくなるほど大きくなり、逆に推定操舵負荷Txが小さくなるほど小さくなる。このように算出された補正値を用いて、操舵負荷を補正することにより、推定操舵負荷Txのヒステリシス特性を精度良く除去して、より路面反力に近似する補正操舵負荷Tx’を求めることができる。
(もっと読む)
車両用運動制御装置
【課題】発生ヨーモーメントの低下を補うためのヨー発生装置の制御手段が、他の転舵制御手段と協調して作動する制御装置を提供する。
【解決手段】本発明に係る車両用運動制御装置は、操舵車輪の転舵角を変更可能な操舵アクチュエータ22を備えた車両に搭載されている。目標転舵角設定手段12,41と、実転舵角検出手段18と、実転舵角を目標転舵角に一致させるように操舵アクチュエータ22を駆動制御する第1の転舵制御手段41と、第1の転舵手段41の介入度に応じてヨー発生装置24を駆動制御する第2の転舵制御手段42,50とを備える。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差である負荷角θLに応じたアシストトルクTAが発生する。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。角速度演算部27は、三相検出電流IUVWのゼロクロス点間の間隔に基づいて、回転角速度ωを求める。補正部28は、指示操舵トルクT*の変化に応じて回転角速度ωに補正を施す。角速度適応制御部29は、回転角速度ωに基づき、PI制御部33のゲインを変更する。
(もっと読む)
補助操縦機構を動作させる方法
本発明は、補助操縦機構(10)を動作するための方法に関する。モータートルクは、電気処理ユニットによって計算され、また、適切なモーターコントローラーによって調整される。計算されたモータートルクの信頼性チェックは、3レベルコンセプトの枠組の中で実施される。モータートルク制限曲線よりも上の部分について、積分され、また、モータートルク制限曲線よりも下の部分についての積分の減算が、実行される。レベル1において、目標モータートルクが第1積分閾値によって制限され、またレベル2において、制限の監視が行われ、本質的に安全なモータートルク制限曲線が、実際のトルクに依存して適用される。  (もっと読む)
(もっと読む)
車両用操舵装置、車両用操舵装置付き車両および車両用操舵方法
【課題】 運転者への違和感を抑制することができる車両用操舵装置、車両用操舵装置付き車両および車両用操舵方法を提供すること。
【解決手段】 転舵角の推定値としての推定転舵角と実転舵角との偏差である転舵角偏差が増加している場合には、転舵角偏差が増加していない場合よりも大きな操舵反力を操舵部に付与するようにした。
(もっと読む)
ラック推力推定装置
【課題】ラック推力の推定値の誤差が大きくなる運転領域でのラック推力の推定を抑制し、精度の良いラック推力を得る。
【解決手段】ラック推力推定装置10は、前輪すべり角演算部10aで前輪すべり角βfを演算し、切増判定部10bでハンドル2が切増状態(θh・(dθh/dt)>0)か否か判定し、前輪すべり角判定部10cで|βf|>Cbfか否か判定し、ラック推力演算部10dは、ハンドル2が切増状態で、且つ、|βf|>Cbfの場合にラック推力Frを推定する。これによりS/N比の低下した運転領域におけるラック推力Frの推定が排除され、精度の良いラック推力Frを得ることができる。
(もっと読む)
路面摩擦係数推定装置
【課題】幅広い運転領域で、レスポンス良く、精度の良い路面μを推定する。
【解決手段】路面μ推定装置10は、サンプリング時間が異なる複数のラック推力をラック推力推定値Fmsveとして検出し、このラック推力推定値Fmsveと同じタイミングで、基準とするラック推力(基準ラック推力)Fmdveを少なくとも路面μをパラメータとして含むタイヤモデルにより推定し、少なくともラック推力推定値Fmsveと基準ラック推力Fmdveとの偏差を最小とする路面μの値を最適化計算により求める。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 車輪を転舵する転舵モータが失陥しても、トー角調整用モータを転舵の駆動源に転用して転舵を行うことができるステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用の操舵軸10と機械的に連結されていないステアリングホイール1と、ステアリングホイール1の操舵角を検出する操舵角センサ2と、ステアリングホイール1に反力トルクを付与する操舵反力モータ4と、操舵軸10を駆動する転舵モータ6および操舵反力モータ4を制御するステアリング制御部5aとを備える。転舵モータ6とは別に、トー角を調整するトー角調整用モータ7を有するトー角調整機構16を設ける。転舵モータ6が失陥したとき、転舵モータ6を操舵軸10から切り離しトー角調整用モータ7で転舵を行なわせる切換手段17を設ける。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 車輪を転舵する転舵モータが失陥しても、トー角調整用モータを転舵の駆動源に転用して転舵を行うことができるステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用の操舵軸10と機械的に連結されていないステアリングホイール1と、ステアリングホイール1の操舵角を検出する操舵角センサ2と、ステアリングホイール1に反力トルクを付与する操舵反力モータ4と、操舵軸10を駆動する転舵モータ6および操舵反力モータ4を制御するステアリング制御部5aとを備える。転舵モータ6とは別に、トー角を調整するトー角調整用モータ7を有するトー角調整機構16を設ける。転舵モータ6が失陥したとき、転舵モータ6の回転軸6aを固定しトー角調整用モータ7で転舵を行なわせる切換手段17を設ける。
(もっと読む)
車両の自動転舵装置
【課題】車両の状態を表すセルフアライニングトルク(SAT)によって自動転舵時の転舵角度又は転舵トルクを補正して、自動操舵によって車両が目標経路に沿って精度良く移動するよう制御可能な車両の自動転舵装置を提供する。
【解決手段】目標位置に至る目標経路に沿って車両を誘導する車両の自動転舵装置は、目標経路に応じた目標転舵角度を算出する目標転舵角度算出部61と、転舵角度を取得する転舵角度取得部と、目標転舵角度に基づいて、SAT目標値を算出するSAT目標値算出部62と、車両の実SATを取得する実SAT取得部64と、SAT目標値と実SATを比較した結果に応じて、車両の実際経路が目標経路と一致するよう目標転舵角度を補正する目標転舵角度補正部63とを備える。
(もっと読む)
モータ制御装置
【課題】回転角の推定演算を必要時にのみ行うことができ、しかも、演算開始後速やかに妥当な推定回転角を得ることができ、これによって、演算負荷の低減を図りながらモータを適切に制御することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、レゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。この間、回転角推定部31は推定演算を停止している。レゾルバ2の故障が発生すると、探査電圧発生部26から探査電圧指令値が発生され、モータ1のステータは探査磁界を形成する。このときのトルクセンサ7の出力に基づいて、初期値決定部24が回転角推定部31の内部変数の初期値を決定する。この初期値を用いて、回転角推定部31が推定回転角θEを求める。この推定回転角θEを用いてモータ1が制御される。
(もっと読む)
1 - 20 / 51
[ Back to top ]