
Fターム[3D232DC10]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 履歴蓄積、記憶保持手段 (448)
Fターム[3D232DC10]に分類される特許
61 - 80 / 448
車両用接触回避支援装置
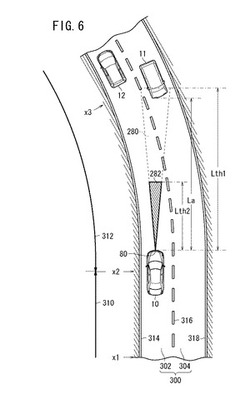
【課題】レーンキープアシスト手段によって車両が操舵制御されているときには、接触回避支援処理が過剰に作動しないようにする。
【解決手段】接触回避ECU20は、レーンキープアシスト部96によって車両10が操舵制御されているときは、車両10が自車線302を逸脱する可能性がきわめて低いことを考慮し、レーダ80によって検出された車両前方の対向車11との相対位置に基づき得られる接触余裕値Laの閾値Laを、レーンキープアシスト部96によって車両10が制御されていないときの第1閾値Lth1より小さい第2閾値Lth2に置き換えて、対向車11に対する当該車両10の接触回避支援を行うようにしたので、接触回避支援処理が過剰に作動する状況を防止できる。
(もっと読む)
車両用操舵制御装置

【課題】トルクステアの影響を軽減し、ドライバの操舵負荷軽減と、安定した操舵状態の実現を可能とする車両用操舵制御装置を得ることを目的とする。
【解決手段】この発明による車両用操舵制御装置は、車輪速信号に基づいて演算したステアリング軸の回転に関連する第一のステアリング軸回転関連値と、ハンドル角信号に基づく第二のステアリング軸回転関連値とを比較し、前記比較の結果に基づいて前記車両に於けるトルクステアの発生の有無を検出するトルクステア検出手段を備え、前記トルクステア検出手段が前記トルクステアの発生を検出したとき、前記トルクステアを抑制するように前記アシストトルクを補正するようにしたことを特徴とする。
(もっと読む)
自動操舵式駐車支援装置の較正のための方法および制御装置
本発明は、車両操舵角のアクティブ制御のためにセットアップされた駐車支援装置の較正のための方法に関し、複数のセンサを用いてパーキングスペースを自動的に検出するステップと、検出されたパーキングスペースに基づいて目標進路を計算するステップとを含む。操舵角は算出された目標進路に従って制御可能なアクチュエータを用いて駆動制御される。さらにアクチュエータによってエラーを考慮するために、目標進路に従った制御によって生じた実際値進路を検出するステップと、前記実際値進路を目標進路とを比較するステップと、前記比較の結果として得られたエラーを確定するステップと、単調関数によって前記エラーに結合される補正パラメータを作成するステップとを備える。この補正パラメータはアクチュエータの動作に関する考慮を可能にし、操舵角の制御には、補正パラメータと設定角の組み合わせに従った制御が用いられる。  (もっと読む)
(もっと読む)
ブラシレスモータ制御装置及びブラシレスモータ制御装置を搭載した電動パワーステアリング装置
【課題】ブラシレスモータの相間短絡を迅速に判定すること。
【解決手段】ブラシレスモータ制御装置50は、多相のブラシレスモータ43の各相に駆動電流を供給する各相のスイッチング素子TUU,TUL,TVU,TVL,TWU,TWLと、この各相のスイッチング素子をデューティ駆動する制御部51と、ブラシレスモータと各相のスイッチング素子との間を個別に接続した、各相の配線57a,57b,57cに流れる相電流を検出するための相電流検出部54を備える。制御部は、各相の配線同士に短絡が発生したことを判定する相間短絡判定部を備える。相間短絡判定部は、相電流が、所定の短絡による過電流の状態と所定の回生による過電流の状態とを、交互に繰り返す発振状態に至ったと判定したときに、短絡が発生したと判定する。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 転舵用モータが失陥してもトー角調整用モータを転舵の駆動源に転用して転舵を行うことができ、かつトー角調整用モータが失陥してもトー角調整機構を固定して安全に走行でき、構成がコンパクトなステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用モータ6と、その回転を転舵軸10に伝える転舵動力伝達機構18と、トー角調整用モータ7と、その回転によりトー角を調整させるトー角調整動力伝達機構30とを備える。転舵用モータ6が失陥したときに、転舵用モータ6に代えてトー角調整用モータ7の回転を転舵動力伝達機構18に伝えて転舵可能とし、トー角調整用モータ7が失陥したときに、転舵用モータ6による転舵のみ行わせる切換機構17を設ける。転舵用モータ6およびトー角調整用モータ7のいずれか一方、または両方に、中空モータを用いる。
(もっと読む)
操舵制御装置、角度検出装置および操舵制御装置付き車両
【課題】 操向輪側に設置するレゾルバの数を少なくするとともに、転舵角度を検出することができる操舵制御装置、角度検出装置および操舵制御装置付き車両を提供すること。
【解決手段】 操舵絶対角度検出手段が検出した操舵絶対角度と偏差記憶手段が記憶する操舵絶対角度と転舵絶対角度との偏差との和と、操向輪の転舵角度範囲内の角度を複数の周期で検出する転舵角度検出手段が制御開始時に検出した初期値との差をオフセット量として求め、転舵角度検出手段が検出した転舵角度とオフセット量の和を転舵絶対角度として算出するようにした。
(もっと読む)
車両の挙動制御装置
【課題】車体スリップ角及びその微分値並びにその2階微分値に基づいて算出されるスピン状態量を制御量として車両のスピン挙動を抑制する挙動制御装置に於いて、急操舵時に制御による運転者のフィーリングの悪化を抑制すること。
【解決手段】本発明の装置は、車両の左右方向のうちの一方の方向に操舵が実行されて車体スリップ角の2階微分値の大きさが所定値を超えた後に所定値を下回るまで制御量に於ける車体スリップ角の2階微分値の寄与が低減されることを特徴とする。
(もっと読む)
車両の制御装置
【課題】後輪操舵制御装置とアクティブサスペンション装置とを備えた車両がダブルレーンチェンジ等の速い切り返しが為される際に発生するロールの違和感を抑制する制御装置を提供する。
【解決手段】本発明は、後輪操舵制御装置10とアクティブサスペンション装置6,7とを備えた車両の制御装置12である。本制御装置は、前記車両の横加速度Gy、前輪舵角、後輪舵角、ロール角を含む運動状態量を検出する運動状態量検出手段と、前記横加速度と前記前輪舵角との相関を算出して、予め設定された標準値と比較し、横加速度修正量を算出する横加速度修正量算出手段125と、前記横加速度修正量と前記横加速度とからロール角制御量を算出するロール角制御量算出手段124と、前記ロール角制御量と前記ロール角とから前記アクティブサスペンションのロール角制御量を算出するロール姿勢制御手段126とを備えることを特徴とする。
(もっと読む)
車両制御装置
【課題】運転者に与える違和感を抑制しつつ、目標値に実際の項目を近づけられる車両制御装置を提供すること。
【解決手段】走行環境あるいは走行条件の少なくとも一方に基づいて運転者に加わる加速度が変化する車両運動に係る項目(加速度)の目標値101を設定する目標値設定手段と、運転者の要求値102を設定する要求値設定手段と、対数値で比較したときの要求値との差が第一の範囲内となる項目の範囲である所定範囲A、および、対数値の変化速度で比較したときの要求値との差が第二の範囲内となる項目の変化速度の範囲である所定変化速度範囲をそれぞれ設定する範囲設定手段と、所定範囲内で項目を目標値に近づけ、かつ、項目の変化速度が所定変化速度範囲内となるように項目の指令値105を設定する指令値設定手段と、指令値に基づいて車両を制御する制御手段とを備え、第二の範囲は、要求値の変化速度に応じて可変に設定される。
(もっと読む)
車両用操舵伝達比可変式操舵装置
【課題】操舵伝達比可変式操舵装置により操舵伝達比が変更された後に操舵装置に残存するオフセットに起因して運転者が操舵操作時に覚える違和感を低減する。
【解決手段】操舵伝達比可変装置14によって操舵伝達比を変更する特定の制御によりオフセットが生じたときには(S180〜200)、特定の制御が終了する際のステアリングホイール20の操舵位置を基準操舵位置とし、基準操舵位置の両側の二つの操舵領域のうちステアリングホイール20の車両直進位置に対しオフセットの側と同一の側の操舵領域を第一の操舵領域とし、オフセットが0であるときの操舵伝達比を標準の操舵伝達比とする。特定の制御の終了後に運転者が第一の操舵領域に於いて操舵操作する場合には(S160)、目標ステアリングギヤ比Rstを標準よりも小さくすることにより(S210)操舵伝達比を標準の操舵伝達比よりも大きくする。
(もっと読む)
車両挙動制御装置
【課題】ステアリングの操舵力に関する情報に基づいてドライバの旋回意思を判定しその結果に応じて車両挙動を制御する車両挙動制御装置において、路面反力トルクの信頼性を考慮し適正な挙動制御が行われるようにする。
【解決手段】車輪偏向時に操舵輪が路面から受ける反力トルクである路面反力トルクを検出する路面反力トルク検出手段11、車両の左右車輪速を検出する左右車輪速検出手段、左右車輪速検出手段の出力である左右車輪速から左右車輪速差を演算する左右車輪速差演算手段15、路面反力トルクに基づいて車両の第一の旋回度を演算する第一旋回度演算手段16、左右車輪速差に基いて車両の第二の旋回度を演算する第二旋回度演算手段17、及び第一の旋回度及び第二の旋回度に基づいて路面反力トルクの信頼性を判定する路面反力トルク信頼性判定手段18を備え、路面反力トルク信頼性判定手段の判定結果に基づいて車両の挙動制御が適正化制御される。
(もっと読む)
車両挙動制御装置
【課題】路面反力トルクに基づいて車両挙動を制御する車両挙動制御装置において、より精度の高い車両状態の推定を行うことで車両挙動の制御が適正化されるようにする。
【解決手段】車両のハンドル角を検出するハンドル角検出手段15、前記車両の車速を検出する車速検出手段11、前記車両の車輪に生じる実路面反力トルクを検出する路面反力トルク検出手段16、前記ハンドル角と前記車速に基づいて目標路面反力トルクを演算する目標路面反力トルク演算手段17、及び前記実路面反力トルクと前記目標路面反力トルクに基づいて車両状態を検出し車両状態検出信号を前記車両挙動を制御するための出力とする車両状態検出器18を備え、前記路面反力トルク及び前記目標路面反力トルクの少なくとも一つに対する所定の不感帯aを有しこの所定の不感帯に基づき前記実路面反力トルクと前記目標路面反力トルクとの位相ずれによる誤制御を適正化する。
(もっと読む)
舵角中点学習方法及び舵角反力制御方法
【課題】アイドルストップの直後から、運転者に与える違和感を少なく、舵角に応じたステアリングのアシスト制御が行える舵角中点学習方法を提供する。
【解決手段】所定条件によりアイドルストップを自動的に行うアイドルストップ機構を有する車両21に設けられる舵角センサ11の舵角中点を学習する舵角中点学習方法において、アイドルストップを行った場合は、アイドルストップ前に学習した舵角中点を記憶し、アイドルストップが解除されたときに、学習に替えて記憶された舵角中点を読み出す。ただし、アイドルストップ中に、操舵輪10の転舵方向にトルク変動があった場合は、記憶された舵角中点をキャンセルする。
(もっと読む)
車両
【課題】簡易な操作により、超信地旋回を行うことが可能な車両を提供する。
【解決手段】2つの前輪(左前輪21及び右前輪31)と、前記前輪にそれぞれ連結され、前記前輪を操舵する操舵用アクチュエータ(左前輪操舵モータ23及び右前輪操舵モータ33)と、前記操舵用アクチュエータの動作を指示するステアリングホイール62と、ステアリングホイール62の回動角θに基づいて定められる旋回中心Z周りを旋回することが可能な前記前輪の操舵角(δFL及びδFR)をそれぞれ算出し、前記前輪の操舵角が算出された操舵角となるように前記操舵用アクチュエータを動作させるコントローラ100と、を具備した。
(もっと読む)
センサの基準点補正方法
【課題】車両の始動直後に走行開始する場合であってもヨーレートの中点を補正できる、センサの基準点補正方法を提供することを課題とする。
【解決手段】走行状態の車両が停車してから、停車した状態で所定時間ΔTstが経過したときにヨーレートセンサのヨーレート中点を補正する、センサの基準点補正方法において、車両の始動時には、所定時間ΔTstより短い所定時間ΔTst’に亘って車両Vが停車しているときに、ヨーレートセンサを暫定中点補正することを特徴とする。
(もっと読む)
車両挙動センサの中点補正方法
【課題】中点学習を必要とし、車両走行中に中点学習を実施する車両挙動センサの誤学習の発生を抑制できる中点補正方法を提供する。
【解決手段】車両挙動センサの中点補正方法は、車両挙動センサの出力値から中点補正値が順次算出される中点補正算出工程と、中点補正値として略同等の値が連続して算出された場合には中点補正が実施され、前回の中点補正値と今回の中点補正値とが異なる場合には中点補正が実施されない中点補正判定工程とを有する。
(もっと読む)
後輪トー角制御装置および電動アクチュエータの基準作動量設定方法
【課題】後輪トー角制御装置が設置された後輪のホイールアライメントを容易に調整できるようにする。
【解決手段】ECU12は、後輪トー角δrが0となる電動アクチュエータ11の基準ストローク量S0を設定する基準ストローク量設定部22と、ストロークセンサ16で検出したストローク量検出値Sdtcと基準ストローク量S0とから後輪トー角検出値δrdtcを算出する後輪トー角検出値算出部23とを備える。ECU12は、基準ストローク量設定制御を行った場合、左右の後輪5を対称にした後(ステップS1)、アクセル開度を一定にした状態で左右の後輪5を対称状態に保持したまま左右の電動アクチュエータを駆動し(ステップS3)、車速vが最大となったストローク量検出値Sdtcを基準ストローク量S0として設定する(ステップS5)。
(もっと読む)
センサの基準点補正方法
【課題】走行状態の車両と停車中の車両における周囲温度の変化の影響を好適に回避してヨーレートセンサの基準点を補正できる、センサの基準点補正方法を提供することを課題とする。
【解決手段】走行状態の車両が停車し、停車した状態で所定時間ΔTstが経過したときに1回だけヨーレート中点補正する。そして、走行状態になることなく、停車した状態のままで所定時間ΔTstが経過した後は、ヨーレート中点補正しないことを特徴とする、センサの基準点補正方法。
(もっと読む)
車両用操舵装置
【課題】省エネルギを図ることのできる車両用操舵装置を提供する。
【解決手段】荷役用油圧アクチュエータとしてのリフトシリンダ31へ作動油を給排するための第1の油圧回路68と、操舵反力用油圧アクチュエータとしての油圧シリンダ13へ作動油を給排するための第2の油圧回路84とで、油圧源としての油圧ポンプ8、主供給路63の部分82、主排出路65の部分83および油タンク64を共用する。リフトシリンダ31が非作動状態にあるときに、切替弁としての操舵反力用制御弁57を切り替え、操舵反力用油圧アクチュエータとしての油圧シリンダ13を働かせる。荷役動作に支障をきたすようなことがない。
(もっと読む)
車両のステアリング装置
【課題】 舵角比可変装置VGRSにより舵角比が大きく設定される場合に、電動パワーステアリング装置EPSの電動モータ31の追従性を確保するために車両電源電圧を昇圧してモータ駆動回路50に電源供給するものにおいて、操舵フィーリングを悪化させないように、昇圧回路60の過熱を防止する。
【解決手段】 昇圧回路60からモータ駆動回路50への電源供給路に副電源70を並列に接続し、副電源70に充電した電気エネルギーを使ってモータ駆動回路50への電源供給を補助する。昇圧温度センサ66により検出した昇圧回路温度の上昇にしたがって、副電源70からモータ駆動回路50への電源供給割合が増加するようにスイッチング素子74のデューティ比を調整する。
(もっと読む)
61 - 80 / 448
[ Back to top ]