
Fターム[3D232DC10]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 履歴蓄積、記憶保持手段 (448)
Fターム[3D232DC10]に分類される特許
141 - 160 / 448
車両運動制御装置及びプログラム
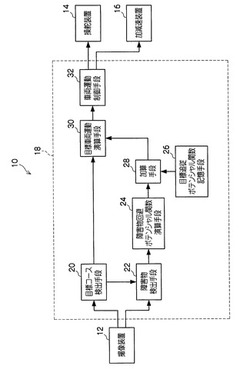
【課題】ドライバに与える違和感を少なくし、かつ、障害物を回避した自動運転を実現することができる
【解決手段】障害物回避ポテンシャル関数演算手段24によって、現在の目標到達点と障害物との相対位置に基づいて、障害物回避のためのポテンシャル関数を演算する。目標車両運動演算手段30によって、目標追従のためのポテンシャル関数、及び演算された障害物回避のためのポテンシャル関数の和である車両制御ポテンシャル関数に基づいて、現在の車両の進行方向と目標到達点へ向かう方向との偏角及び現在の車両の位置と目標到達点との相対位置における車両制御ポテンシャル関数の勾配を演算し、車両制御ポテンシャル関数の勾配に基づいて、目標車両運動を演算する。車両運動制御手段32によって、演算された目標車両運動を実現するように、操舵装置及び加減速装置を制御する。
(もっと読む)
車両挙動制御システム

【課題】3つ以上の制御装置を有する場合に、作動させるべき制御装置を的確に且つ迅速に判断して適切な制御を行うことができるようにする。
【解決手段】電動パワーステアリング装置において電動モータ9により車両の挙動を制御するヨーレート反力制御部32、レーンキープアシスト制御部33及び衝突回避支援制御部34を有し、これらの制御の各々にその重要度に応じて優先順位が予め付与されており、制御の際には、現在作動中の制御装置と作動要求があった制御装置とを比較して、新たに作動要求が発生した制御装置の有無を判断し、新たに作動要求が発生した制御装置がある場合には、現在作動中の制御装置と新たに作動要求があった制御装置との間で優先順位を比較して、新たに作動要求があった制御装置を作動させる制御モードへの移行の要否を判断するようにする。
(もっと読む)
スタビライザ装置とステアリングギヤ比変更装置とを備えた車両
【課題】アクティブスタビライザ装置とステアリングギヤ比変更装置とを備えた車両の実用性を向上させる。
【解決手段】(A)ある依拠パラメータを基準としたステアリングギヤ比rが標準ギヤ比rB(v)となるように、ステアリングギヤ比変更装置を制御する標準制御(S3)と、(B)スタビライザ装置が有するアクチュエータが駆動されない時に、ステアリングギヤ比rが標準ギヤ比rB(v)とは異なるように規定されたスタビライザ非作動時ギヤ比K・rB(v)となるように、ステアリングギヤ比変更装置を制御するスタビライザ非作動時制御(S4,5)とを選択的に実行可能に構成する。スタビライザ装置が非作動となった場合のロール剛性の低下に起因して、車両のロール剛性配分が変化した場合であっても、スタビライザ非作動時制御によって、操舵に対するヨーレートの変化を抑えることが可能である。
(もっと読む)
操舵支援装置
【課題】 操舵支援を中断した後に再開するにあたり、中断前の情報を有効に活用できるようにすることにより、精度のよい操舵支援を行うことができる操舵支援装置を提供する。
【解決手段】 操舵制御ECU1は、目標操舵トルク算出部14において、中断判定部12において車線維持制御を中断した後、車線維持制御を再開するにあたり、車両の走行ラインが共通する場合には、車線維持制御を中断したときの操舵出力積分値を用いる。ここで、斜線維持制御の中断前後で車両の走行ラインが共通するか否かは、操舵制御の中断時間に基づいて判断する。このとき、車両の通行方向と車両が走行する道路のロードキャンバの傾斜方向を用いる。ここで、車両の通行方向とロードキャンバの下り方向が一致する場合には、車両の走行ラインが車線維持制御の中断前後で一致すると判断する際のタイマしきい値を長くする。
(もっと読む)
自動運転システム及び自動運転方法
【課題】本発明の目的は、車両に所望の走行パターンを精度良く再現させるための自動運転システム及び自動運転方法を提供することである。
【解決手段】記憶部30Bは、位置目標値時系列データ及び車速目標値時系列データを記憶する。ハンドル駆動システム60は、位置目標値時系列データが記述する位置目標値と第2車両の位置とに基づいて第2車両のハンドル11Bの操舵角を制御する。ペダル駆動システム70は、車速目標値時系列データが記述する車速目標値と第2車両の車速とに基づいて第2車両のアクセルペダル12B又はブレーキペダル13Bの踏み込み量を制御する。ペダル駆動システムは、ペダルオフセットを用いて踏み込み量を制御する。調整部は、位置の変化を表す位置時系列データ、車速の変化を表す車速時系列データ、位置目標値時系列データ、及び車速目標値時系列データに基づいて、ペダルオフセットを調整するためのペダルオフセット調整値を出力する。
(もっと読む)
電動パワーステアリング装置
【課題】コンデンサの放電に関する回路構成を簡素化した電動パワーステアリング装置を提供する。
【解決手段】バッテリ6の電圧を平滑化するコンデンサ10と、このコンデンサ6より上流側に介挿されたリレー接点9aを有するリレー9と有する電動パワーステアリング装置1において、リレー接点9aの下流側からコンデンサ10の端子電圧を直接システム電源部13へ導く放電用のダイオード14を設けることにより、制御部17等の制御系の電源電圧Vccを生成するシステム電源部13及びそこから制御用の電力供給を受ける制御系を放電回路として利用する。
(もっと読む)
車両挙動制御装置
【課題】より適切に車両の挙動を制御することのできる車両挙動制御装置を提供すること。
【解決手段】モーメント制御量を導出する際に、車輪はグリップオフの状態であると判定した場合のみでなく、グリップ限界であるとセルフアライニングトルクに基づいてグリップ限界判定部66によって判定した場合には、モーメント制御量導出部63でモーメント制御量を導出する際に用いる走行状態量の種類を増加させて導出する。これにより、車輪がグリップ限界であると判定される場合も、ヨーレート偏差を小さくする挙動制御が可能になる。また、セルフアライニングトルクは、車輪のグリップが限界であるか否かの判定をする際に用いているので、セルフアライニングトルクにノイズが含まれている場合でもモーメント制御量の導出には影響を与えず、より適切なモーメント制御量を導出することができる。これらの結果、より適切に車両の挙動を制御することができる。
(もっと読む)
車両用操舵制御装置
【課題】イグニッションオフ時の操舵によらず,早期に操舵角の異常を検出する車両用操舵制御装置を提供する。
【解決手段】この発明の車両用操舵制御装置は,操舵角を検出する操舵角検出手段10と,操舵補助用モータ7の回転角を検出するモータ角検出手段17と,IGオン時にモータに駆動指示を出すモータ駆動指示手段15と,モータ駆動指示手段によりモータを駆動している間のモータ角検出手段の出力に基づき,操舵角速度を推定する操舵角速度推定手段18と,駆動指示によりモータを駆動している間の操舵角検出手段の出力に基づき,操舵角速度を検出する操舵角速度検出手段16と,操舵角速度検出手段の出力及び操舵角速度推定手段の出力との偏差の絶対値を出力する偏差演算手段19と,駆動指示によりモータを駆動している間に偏差演算手段の出力が所定の閾値以上の場合に操舵角検出手段の異常を検出する操舵角異常検出手段20とを備えたものである。
(もっと読む)
操向支援装置
【課題】ドライバの運転意識に応じて操舵制御と制駆動力制御との制御分担比を適切に設定する操向支援装置を提供する。
【解決手段】操向支援装置を、自車両前方の環境情報を認識する環境認識手段110と、自車両の車両状態を検出する車両状態検出手段130と、操舵機構に操舵力を付与する操舵制御手段190と、左右輪の制駆動力差によりヨーモーメントを発生させる制駆動力制御手段200と、環境認識手段及び車両状態検出手段を用いて目標操向量を設定する目標操向量設定手段140と、目標操向量に基づいて操舵制御手段の目標操舵量及び制駆動力制御手段の目標制駆動力差を設定する操向制御手段180と、ドライバの覚醒度Aを検出する覚醒度検出手段160とを備え、操向制御手段は、覚醒度の低下に応じて、操舵制御手段の制駆動力制御手段に対する制御分担比RSTRを増加させる構成とする。
(もっと読む)
車両用舵角検出装置及びこれを使用した電動パワーステアリング装置
【課題】簡易な演算処理で、長時間の旋回や片方の修正舵などによる誤推定を抑制することができる車両用舵角検出装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】車両のステアリング機構の相対舵角θrを検出する相対舵角検出手段14,31と、既知の車両全舵角範囲θtを記憶する全舵角範囲記憶手段24と、該全舵角範囲記憶手段24に記憶された前記車両全舵角範囲θtと、前記相対舵角検出手段31で検出した前記相対舵角θrとに基づいて前記ステアリング機構の絶対舵角推定値θaを演算する絶対舵角推定値演算手段26とを備えている。
(もっと読む)
車両のステアリング装置
【課題】 舵角比の制御により操舵アシストトルク不足を運転者に感じさせないようにし、かつ、最大舵角に接近したことを運転者が認知できるようにする。
【解決手段】 中操舵角領域(B)においては、操舵角θinの増加にしたがって減少する舵角比を設定する。これにより、電動パワーステアリング装置における必要出力の増加が抑えられ操舵アシストトルク不足が発生しなくなる。大操舵角領域(C)においては、中操舵角領域(B)の舵角比よりも大きな舵角比に設定する。このため、電動パワーステアリング装置の必要出力が増加し、必要出力に対して電動モータの出力が不足してハンドル操作が重くなる。従って、運転者は、操舵操作中において最大舵角θinmaxの接近を適切に認知することができる。
(もっと読む)
電動パワーステアリング装置
【課題】メモリに故障が検出された場合でも可及的に操舵補助処理を継続する仕組みを、部品点数を増やすことなく実現する電動パワーステアリング装置を提供する。
【解決手段】メモリ制御管理手段301、302は、制御手段がメモリ103の小領域の確保要求を発行した際、確保されていない小領域を選択してメモリ故障検出手段303に逐次故障検出を実行させ、正常な小領域が存在しているとき、該小領域を確保し、正常な小領域が存在しなかったとき、エラーを出力し、電動パワーステアリング装置は、エラーが出力されたとき、操舵補助処理を停止する。
(もっと読む)
車両運転支援装置
【課題】運転者による車両の運転操作状態との協調を図りながら、車両の安定走行のために車両の運転を適当に支援することができる装置を提供する。
【解決手段】車両運転支援装置10によれば、運転者による車両1の過去第1期間にわたる運転操作度合Dd1が第1閾値TH_Dd1以下である場合、制動装置12の動作が優先的に補正された上で必要に応じて操舵装置11の動作が補足的に補正される。その一方、運転者による車両1の過去第1期間にわたる運転操作度合Dd1が第1閾値TH_Dd1を超えている場合、操舵装置11の動作が優先的に補正された上で、必要に応じて制動装置12の動作が補足的に補正される。
(もっと読む)
電動パワーステアリング装置
【課題】故障診断処理がモータ電流制御にて途中で中断されるのを防止しつつ、モータ電流制御と故障診断処理とを一台の演算処理装置にて実行させる。
【解決手段】CPU22は、トルク指令生成処理22aおよび電流制御処理22bの優先度よりも故障診断処理22cの優先度を高くし、マイクロコントロールユニット21などの故障診断処理22cを所定の周期で実行しながら、トルク指令生成処理22aおよび電流制御処理22bを故障診断処理22cの合間に実行する。
(もっと読む)
運転支援装置
【課題】目標経路に沿って運転を支援する。
【解決手段】車両の運転を支援するための装置は、車両を目標位置に移動させるための目標経路に対する、車両の現在の位置の偏差が、該目標経路を中心とした所定範囲の幅内に収まるように、該車両のステアリングに荷重を加える。他の実施例では、車両を目標経路に沿って目標位置に移動させるための目標操舵角に対する、車両の現在の操舵角の偏差が、該目標操舵角を中心とした所定範囲の角度内に収まるように、該車両のステアリングに荷重を加える。これら所定範囲は、車両が目標位置に近づくに従って狭くなるよう設定される。こうして、目標位置に近づくにつれて徐々に幅が狭くなる“わだち”を走行しているような感覚を運転者に与える。
(もっと読む)
走行支援装置
【課題】運転者が違和感や恐怖感を覚えることを抑制できる運転支援装置を提供する。
【解決手段】運転者の注視点を設定し、その注視点に基づいて走行軌道を設定する。一般的に、コーナーを走行する際には、運転者はコーナー出口付近を注視しつつ操舵を行なう。従って、運転者の注視点を設定し、注視点に基づいて走行軌道を設定すると、その走行軌道は、運転者が自分で操舵した場合の走行軌道に近い軌道となることから、運転者が違和感や恐怖感を覚えることを抑制できる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】道路状況に応じた適切なレーン逸脱抑制制御を行うことができなかった。
【解決手段】自車両が走行している自車走行道路と前記自車走行道路における自車走行レーンを含む前記自車両の位置を示す情報を取得し、前記自車両の位置より前方で前記自車走行道路と接続する接続道路が存在する場合、前記自車走行道路に対する前記接続道路の属性を示す情報を取得し、前記属性に応じて、前記自車走行道路の進行方向を基準とした左右方向のうち、レーン逸脱抑制制御の程度を変更させる変更方向を設定し、設定された前記変更方向のレーン逸脱抑制制御の程度を変更させる。
(もっと読む)
電動パワーステアリング制御装置
【課題】故障解析に必要な情報、重要度の高い情報を洩れなく記憶することができる電動パワーステアリング制御装置を得る。
【解決手段】運転者による操舵をトルクセンサ3によって検出し、この検出された操舵トルクに基づき、モータ5を駆動する目標電流を演算する制御手段11を、故障検知手段12により監視して、故障を検知し、この検知した故障についての故障情報を記憶するか否かを故障記憶選択手段13により選択し、この故障記憶選択手段13によって記憶するよう選択された故障情報を、記憶手段14により記憶領域に記憶するようにして、記憶する故障情報を選択できるようにした。
(もっと読む)
車両運動制御システム
【課題】既存の車両制御装置に対して大幅な変更を加えることなく、しかも互いの干渉を抑制して協調した動作を実現することのできる車両運動制御システムを提供する。
【解決手段】車両の挙動を制御する複数の車両制御装置としてのVSA及びRTCと、これらと通信線を介して接続される集中制御装置としての協調制御部17とを有し、VSA及びRTCと協調制御部はそれぞれ、規範ヨーレートを算出する規範ヨーレート算出部10,15,18を備えており、協調制御部が正常であるときは、VSA及びRTCの各々が、協調制御部から取得した規範ヨーレートに基づいて制御を行い、協調制御部が異常であるときは、VSA及びRTCの各々が、自装置内で算出された規範ヨーレートに基づいて制御を行うものとする。
(もっと読む)
車両の走行安全装置
【課題】自車が横風を受けるような走行状況にあるときの安全性を向上させるようにした車両の走行安全装置を提供する。
【解決手段】自車の進行方向の前方を撮像して得た画像に基づいて設定された、自車が走行すべき目標経路に沿って走行するように自車の操舵をアシストする目標経路維持走行制御を実行する走行制御部を備えた車両の走行安全装置において、自車に作用する横風の発生を推定し(S16)、横風の発生が推定される場合、目標経路維持走行制御を実行する(S22)。
(もっと読む)
141 - 160 / 448
[ Back to top ]