
Fターム[3D232DC10]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 履歴蓄積、記憶保持手段 (448)
Fターム[3D232DC10]に分類される特許
81 - 100 / 448
車両用操舵装置
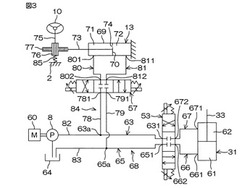
【課題】省エネルギを図ることのできる車両用操舵装置を提供する。
【解決手段】荷役用油圧アクチュエータとしてのリフトシリンダ31へ作動油を給排するための第1の油圧回路68と、操舵反力用油圧アクチュエータとしての油圧シリンダ13へ作動油を給排するための第2の油圧回路84とで、油圧源としての油圧ポンプ8、主供給路63の部分82、主排出路65の部分83および油タンク64を共用する。リフトシリンダ31が非作動状態にあるときに、切替弁としての操舵反力用制御弁57を切り替え、操舵反力用油圧アクチュエータとしての油圧シリンダ13を働かせる。荷役動作に支障をきたすようなことがない。
(もっと読む)
車両のステアリング装置

【課題】 舵角比可変装置VGRSにより舵角比が大きく設定される場合に、電動パワーステアリング装置EPSの電動モータ31の追従性を確保するために車両電源電圧を昇圧してモータ駆動回路50に電源供給するものにおいて、操舵フィーリングを悪化させないように、昇圧回路60の過熱を防止する。
【解決手段】 昇圧回路60からモータ駆動回路50への電源供給路に副電源70を並列に接続し、副電源70に充電した電気エネルギーを使ってモータ駆動回路50への電源供給を補助する。昇圧温度センサ66により検出した昇圧回路温度の上昇にしたがって、副電源70からモータ駆動回路50への電源供給割合が増加するようにスイッチング素子74のデューティ比を調整する。
(もっと読む)
車両の駆動力制御装置
【課題】車両が低車速かつ大舵角旋回をおこなう場合に最大ヨーモーメントを発生させる駆動制御装置を提供すること。
【解決手段】車速が所定車速以下かつ操舵角が所定角以上で車両Veが旋回をおこなう場合に、キングピンオフセットを考慮して車両重心点P2の周りに発生させるヨーモーメントを算出し、その算出されたヨーモーメントが最大になるように車両Veの転舵角δL,δRが制御されるように構成されている。したがって、キングピンオフセットを考慮することにより、車両Veの旋回に適したヨーモーメントを算出することができるとともに、旋回動作中に車両Veに駆動力変化が生じず、車両Veの車両操作性を向上させることができる。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置を制御する装置が有する記憶装置の不具合を診断する際の時間を短縮すること。
【解決手段】CPU101、ROM102、RAM103は、電動パワーステアリング装置の制御に用いられる。ROM102やRAM103は、電動パワーステアリング装置の制御に使用される情報を格納するとともに、複数のエリアに分割されている。複数のエリアは、電動パワーステアリング装置の制御における所定の処理単位毎に対応している。CPU101は、前記処理単位を実行するタイミングで、複数のエリアのうち、これから実行する処理単位に対応するエリアを診断する。また、CPU101は、前記処理単位を実行するタイミングでないときには、ROM102やRAM103に対する診断を実行しない。
(もっと読む)
走行制御装置
【課題】自車両の横方向の移動に関する走行制御を、先行車両の状態に応じて適切に行うことができる走行制御装置を提供する。
【解決手段】操舵制御装置1では、ECU7において先行車両位置情報に基づき操舵制御の制御量が算出され、算出された制御量で操舵制御が実行される。さらに、操舵制御装置1では、ミリ波レーダ6によって先行車両の自車両Cに対する車間距離が検出され、ECU7において、検出された車間距離に応じて操舵制御の目標制御量のゲイン値が変更される。つまり、操舵制御の目標制御量が、先行車両の状態に応じて変更される。
(もっと読む)
制御装置
【課題】障害物の回避時における車両の安全性を向上させることができる制御装置を提供すること。
【解決手段】制御装置100は、車両1の走行の障害となり得る障害物Z1を検出したら、その障害物を回避するために車両1を旋回させる。旋回が終了したら、車両1の側面のうち、回避物(回避した障害物)Z1がある側面側に回避物監視エリアKを設定して、車両1が回避物Z1の横を通過するまでの間、その回避物Z1を監視する。本実施形態の制御装置100では、回避物監視エリアK内において回避物Z1が検出されなくなるまで、その回避物Z1側への車両1の旋回を制限しているので、回避中の回避物に車両1が衝突する可能性を低下させることができる。よって、障害物の回避時における車両1の安全性を向上させることができる。
(もっと読む)
車両の後輪操舵制御装置
【課題】車両に備えられたアクティブフロントステア装置が旋回中に旋回方向と逆方向に前輪を操舵するときに車両を安定走行させるように後輪を操舵する制御装置を提供する。
【解決手段】本発明は、ヨーレートを含む車両の運動状態量を検出する状態量検出手段13〜16,19と、検出された運動状態量に基づき指示トー角θTDを算出し、指示トー角に応じてアクチュエータの駆動により車両の左右後輪のトー角を変化させる後輪トー角制御手段120と、を備え、アクティブフロントステア装置18は、運転者の操舵量に基づく基本前輪舵角14と車両の運動状態量に基づく目標前輪舵角19とが一致しない場合、カウンタステア制御を行うとともに、カウンタステア信号を前記後輪トー角制御手段に出力し、後輪トー角制御手段は、カウンタステアが入力された場合、ヨーレートのゲインを増幅k1させるとともに、指示トー角の設定ゲインを減少k2させるように構成する。
(もっと読む)
電動パワーステアリング装置およびその制御方法
【課題】制御系における発振を抑制し、安定性と応答性を向上させることができる技術を提供する。
【解決手段】ステアリングホイールに連結される第1の回転軸と、転舵輪を転舵させるラック軸と、ラック軸を直線移動させる第2の回転軸と、トーションバーと、ステアリングホイールの操作に対するアシスト力を付与する電動モータと、ステアリングホイールの操舵トルクを検出する操舵トルク検出手段と、操舵トルク検出手段が検出した操舵トルクに基づいて電動モータに供給する目標電流を設定する目標電流算出部20とを備え、目標電流算出部20は、トーションバーをバネ要素として、電動モータ、第2の回転軸およびラック軸を慣性要素として含む制御系の共振周波数成分を抑制する共振補償部27を操舵トルク検出手段の出力側に有し、共振補償部27にて共振周波数成分が抑制された操舵トルクに応じて目標電流を設定する。
(もっと読む)
デッドタイム設定方法、モータ制御装置および電動パワーステアリング装置
【課題】モータ駆動用FETの特性を測定することなく、モータ制御装置毎に好適な値を設定するデッドタイム設定方法を提供する。
【解決手段】デッドタイム設定装置は、複数のデッドタイム設定値Dnから1つのデッドタイムを順に選び(S12、S22)、選ばれるデッドタイムをモータ制御装置に設定してモータを駆動させ(S14)、そのトルクの大きさを検出し(S16)、その大きさに基づきトルクリップルの大きさを算出して(S18)記憶し(S20)、トルクリップルの大きさが最も小さくなるデッドタイムを選択して(S24)、モータ制御装置に対して最終的に設定する(S26)。そうすればモータ駆動用FETの特性を測定する困難な測定方法によらず、FETの特性ばらつきに応じたモータ制御装置毎の好適な値を簡単かつ低コストで設定することができる。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】記憶されたパラメータ値を装置起動時に使用する場合であっても、温度変化や製造ばらつきによるパラメータ値のずれを補償する。
【解決手段】本モータ制御装置において、Φ算出部26は、オープンループ制御部22に使用されるモータの回路方程式に含まれるパラメータであるΦ値を、電流センサ14の検出電流に基づき算出する。Φ値記憶部28は、装置動作終了時点におけるΦ値および温度センサ6の検出温度を記憶する。初期Φ算出部27は、装置起動時点において、記憶された温度から装置起動時における温度センサ6の検出温度への変化に応じて、記憶されたΦ値を補正し、初期値としてオープンループ制御部22に与える。このことにより製造ばらつきだけでなく温度変化を補償したパラメータでオープンループ制御が行われるので、装置起動時点から直ちに高い精度でモータを制御することができる。
(もっと読む)
車両挙動制御装置
【課題】操舵伝達特性可変設定装置を組み込まれた電動式パワーステアリング装置付き操舵装置を有する車両において、電動式パワーステアリング装置が失陥し、セルフステアが生じた場合に、対策装置を冗長なものにすることなく、運転者のステアリング操作に違和感を与えないようにすること。
【解決手段】故障判定部108によって電動式パワーステアリング装置の失陥が検出され、且つセルフステア検出部112によってセルフステアが検出された場合には、VGS用モータ58によって電動式パワーステアリング装置の失陥によるセルフステアを打つ消す方向の操舵を行う。
(もっと読む)
車両の出庫モード選択表示装置
【課題】駐車モードに応じて適切な出庫モードを選択する表示装置を提供する。
【解決手段】出庫モード選択表示装置は、駐車スペースへの車両の駐車形態を示す駐車モードのそれぞれに対応して、駐車スペースからの車両の出庫形態を示す出庫モードを予め記憶する出庫モード記憶手段と、車両が駐車スペースに駐車するとき、該駐車の駐車モードを判定する駐車モード判定手段と、車両が前記駐車スペースに駐車した後、該車両の乗員からの該駐車スペースからの出庫開始指示を検出する手段と出庫開始指示に応じて、出庫モード記憶手段から、該判定された駐車モードに対応する出庫モードを選択して表示する選択表示手段と、を備える。自動操舵によって駐車された場合のみならず、手動操舵によって駐車された場合にも駐車モードを判定することができる。
(もっと読む)
車両挙動制御装置
【課題】 挙動制御アクチュエータの作動量を検出するセンサが故障した場合においても、望ましくない車両挙動を発生させ難くした車両挙動制御装置を提供する。
【解決手段】 油圧センサ26が故障することで実際には存在しない油圧差ΔPが継続して算出された場合、フィードバック積分項Iiが徐々に増大して遂には上限値Ilimを超え、ステップS26の判定がYesになる。すると、ATTS−ECU16は、ステップS29でフィードバック積分項Iiを上限値Ilimとした後、ステップS27,S28に移行して駆動電流フィードバック項Ifbや目標駆動電流Itgtの算出を行う。これにより、駆動電流フィードバック項Ifb(すなわち、目標駆動電流Itgt)の無制限な増大が防止され、ATTS13の不適切な作動に起因する望ましくない車両挙動が抑制される。
(もっと読む)
車両用操舵装置及び車両用操舵方法
【課題】ヨーレートセンサを設けることなく車両の片流れの抑制を精度良く行うことができる車両用操舵装置及び車両用操舵方法を提供する。
【解決手段】車輪速センサ16FL〜16RRで検出した車輪速VFL〜VRRの履歴を取得し、その履歴を統計処理することで、左右のタイヤ動半径の差異によって発生する車輪速VFL〜VRRの検出誤差を推定する。次に、推定した検出誤差分、車輪速センサ16FL〜16RRで検出した車輪速VFL〜VRRを補正する。補正後の車輪速VFL〜VRRに基づいて、車両のヨーレートφを推定し、推定したヨーレートφに基づいて車両の直進判定を行う。そして、直進走行時の転舵トルクTpを打ち消す方向の片流れ抑制操舵補助トルクを操舵部に付加する片流れ抑制制御を行う。
(もっと読む)
車両挙動制御装置
【課題】 アクチュエータの作動遅れを補償するとともに、走行状態に適した応答性を実現できる車両挙動制御装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS23で車速Vに所定の車速係数Kvを乗じて車速補正値Fcvを算出した後、ステップS24で路面μに所定のμ係数Kμを乗じてμ補正値Fcμを算出する。次に、ATTS−ECU16は、ステップS25で、フィルタ周波数ベース値Fbに対して車速補正値Fcvを減じるとともにμ補正値Fcμを加えることにより、可変ローパスフィルタ63のフィルタ周波数Ffを設定する。これにより、フィルタ周波数Ffは、車速Vが高くなるほど低くなり、路面μが高くなるほど高くなる。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】トルクセンサを用いることなく、ドライバーによるステアリングの操作介入を判断する。
【解決手段】駐車位置に対する目標駐車経路に応じて設定される目標操舵角に基づいて電動モータ13を制御することにより、駐車時のステアリング操作が自動的に行われる。この場合、ステアリングの角加速度ω’に基づいて、ドライバーによるステアリングの操作介入が判断される。
(もっと読む)
駐車支援装置
【課題】駐車区画内に障害物があっても駐車可能な駐車支援装置を提供する。
【解決手段】障害物20の存在により、車両7が駐車可能なスペースの幅が狭くなっており、サイドモニターカメラ11は、障害物20の位置や大きさ等の障害物情報を検知する。サイドモニターカメラ11によって検知された障害物情報は、障害物情報取得手段14に伝達される。障害物情報取得手段14が取得した障害物情報と、駐車区画情報記憶手段15に記憶された駐車区画情報とに基づいて、移動軌跡変更手段5は、一方の側壁SWと障害物20との間のスペースに車両7が侵入可能となるように、駐車軌跡記憶手段4に記憶された基準駐車シーケンスLの第2移動軌跡L2を変更して変更第2移動軌跡L2’にする。
(もっと読む)
ナビゲーション装置
【課題】電気自動車のバッテリ劣化を防止すると共に、そのために行うバッテリの放電エネルギーを有効に活用できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置7を、電気自動車1の駆動用モータ3を制御するモータ制御装置10と通信可能に構成し、制御装置22は、電気自動車1が走行停止となっている期間が所定の閾値を超えると、駆動用モータ3を空転させる指令をモータ制御装置10に出力する。そして、駆動用モータ3が空転しない又は滑らかに回転しない等の異常だと判断した場合は、表示装置や音声出力装置によりその旨の報知を行う。
(もっと読む)
車両運動制御システム
【課題】旋回運動の安定化制御の干渉を防止できる車両運動制御システムを低コストで提供することを目的とする。
【解決手段】車両運動制御システムは、駆動輪である左右前輪に異なる駆動力を配分することにより車両にヨーモーメントを発生させる左右駆動力配分装置と、車両の転舵輪である前輪の向きを変更する操向ハンドルの操作角θHに応じて後輪のトー角を変更する後輪トー角制御装置と、を少なくとも備える。左右駆動力配分装置は左右駆動力配分制御ECU37を有し、フィードフォワード部71とフィードバック制御部73と駆動力配分量制御状態モニタ部75を有している。駆動力配分量制御状態モニタ部75が、車両の旋回方向のヨーレイトを増加させる方向に作動しているときには、後輪トー角制御ECU36における第2補正部67は、操向ハンドルの操作角θHの向きと逆相に後輪のトー角を制御しない。
(もっと読む)
電動パワーステアリング装置
【課題】充電完了する前に急速な操舵が行われても、操舵中に操舵補助力が急落することのない電動パワーステアリング装置を提供する。
【解決手段】主電源としてのバッテリ6から又は当該バッテリ6及び補助電源としてのキャパシタ7からモータ4に電力を供給することが可能であり、操舵トルクに応じてモータ4により操舵補助力を生じさせる電動パワーステアリング装置1において、キャパシタ7から電力を供給する必要があるとき、キャパシタ7の充電率が所定値以下の充電不足状態であれば、制御回路13により、操舵トルクに応じた本来の操舵補助力を予め抑制可能とする。
(もっと読む)
81 - 100 / 448
[ Back to top ]