
Fターム[3D232DC10]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 履歴蓄積、記憶保持手段 (448)
Fターム[3D232DC10]に分類される特許
21 - 40 / 448
電動パワーステアリング装置
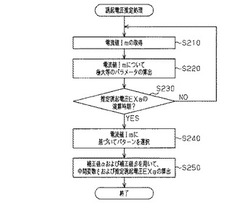
【課題】操舵系にアシスト力を付与するモータについて、その抵抗値を精確に算出することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、電流値Imおよび電圧値Vmに基づいて外乱オブザーバにより推定誘起電圧EXaを算出する。そして、推定誘起電圧EXaが所定範囲内にあるとき電流値Imおよび電圧値Vmに基づいて抵抗値を算出する。さらに、最後に取得した電圧値Vmよりも前に取得した電圧値Vm(過去電圧値)および最後に取得した電流値Imよりも前に取得した電流値Im(過去電流値)に基づいて外乱オブザーバの演算式を補正する。
(もっと読む)
電動パワーステアリング装置

【課題】電動パワーステアリング装置を制御する装置が有する記憶装置に不具合が発生したとき、アシスト可能な場合にはアシストを継続すること。
【解決手段】電動パワーステアリング装置が備えるECU30は、CPU101、RAM102及びROM103を有している。RAM102は、正常状態で使用される正常時記憶領域と、不具合が発生したときに使用される不具合発生時記憶領域とを有する。ROM103は、正常状態で使用されるコンピュータプログラムが記憶される正常時用プログラム記憶領域と、不具合が発生したときに使用されるコンピュータプログラムが記憶される不具合発生時用プログラム記憶領域とを有している。CPU101は、電動パワーステアリング装置の制御における複数の機能を実現するとともに、RAM102及びROM103の不具合を検出する。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
電動パワーステアリング装置
【課題】製造工数を低減することができる技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、ステアリングホイールに連結される第1の回転軸と、第1の回転軸とトーションバーを介して連結される第2の回転軸と、第1の回転軸と第2の回転軸との相対回転角度を検出する磁気センサと、ステアリングホイールに操舵トルクが付与されていないときの磁気センサの出力値である基準値を記憶する記憶部とを有し、記憶部に記憶された基準値と磁気センサの出力値とに基づいて操舵トルクを検出するトルク検出装置と、外部装置と通信を行うために外部装置のコネクタと接続される接続コネクタ16を有するとともに、トルク検出装置が検出した操舵トルクに基づいて電動モータの駆動を制御する制御ユニット10と、を備え、トルク検出装置の記憶部に基準値を記憶させる処理を、制御ユニット10の接続コネクタ16を介して行うことを可能にする。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】操舵トルクに対して電流指令値が零に設定される不感帯が適正に設定できない場合でも、モータ電流零の状態を検出してモータ電流検出値のオフセット誤差を補正する電動パワーステアリング装置の制御装置を提供する。
【解決手段】電流指令値I、操舵トルクT、及び操舵速度Vを読み込み、操舵トルクTと電流指令値のコラム軸換算トルクTec(Tec=I×Kt ×G)との和P(P=T+Tec)を演算(P11、12)、値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)か否かを判定し、(P<Tfc)の場合はモータ電流零と見なせる状態が検出されたものと判定、その時点で検出されたモータ電流検出値iをオフセット補正値としてオフセット誤差の補正演算を行う(P13、15)。値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)でない場合はオフセット誤差の補正演算を中止する(P16)。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】モータと制御装置の各相特性を相殺して所望特性に変換すると共に、各相特性を一致させることによりトルクや速度等のリップル精度を向上させ、異音の発生がなく操舵に違和感のない電動パワーステアリング装置の制御装置を提供する。
【解決手段】ステアリングシャフトに発生する操舵トルク及び車速に基づいて操舵トルク補助指令値を算出し、操舵トルク補助指令値から各相電流指令値を算出し、各相電流指令値とモータの各相電流値とから算出した電流制御値に基づいてステアリング機構に操舵補助力を与えるモータを制御するようになっている電動パワーステアリング装置の制御装置において、モータと制御装置の各相特性を相殺する特性を有するフィルタを各経路に配設し、モータと制御装置の各相特性を一致させると共に、モータと制御装置の各相特性を所望特性とする。
(もっと読む)
異常判定装置および車両用制御装置
【課題】舵角センサの診断における誤判定を抑えることを目的とする。
【解決手段】第1診断手段21は、舵角センサ92から取得した舵角の今回値と前回値との差の絶対値を変化量として算出する第1変化量算出部21Aと、正常閾値を記憶する第1記憶部21Bと、変化量が正常閾値を超えたときに、舵角の前回値を基準舵角に設定する基準舵角設定部21Cと、変化量が正常閾値を超えたときから第1の判定時間が経過するまでの間、正常閾値を徐々に増加させる増加部21Eと、第1の判定時間中、舵角と基準舵角との偏差と、正常閾値とを比較し、偏差が正常閾値よりも大きいときに第1カウンタ21Gをカウントアップ(カウント)する偏差比較部21Fと、第1カウンタ21Gが所定値に達すると舵角センサ92が異常であると判定する第1判定部21Hを備えている。
(もっと読む)
トルク検出装置および電動パワーステアリング装置
【課題】 レゾルバの検出コイルの一方が断線した場合でも、操舵トルクを検出できなくなる状況を低減する。
【解決手段】 第1レゾルバ110,第2レゾルバ120は、ハンドル中立状態におけるロータ部110r,120rとステータ部110s,120sとの相対位置関係が、sin相検出信号の振幅がゼロでcos相検出信号の振幅が最大となる位置を基準位置(θe=0°)として、その基準位置に対して電気角で45°+90°×K(Kは整数)だけずれるように、組み付け位相が設定されている。これにより、ハンドル中立状態においては、レゾルバの電気角が回転角不確定領域に入らなくなり、操舵トルクを検出できなくなる頻度が低下する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの推定温度が実際の温度より高くなり、過熱状態でないにも関わらず、電動モータの電流制限制御が行われることを防止できる電動パワーステアリング装置を提供することにある。
【解決手段】基板温度センサの今回値と前回値の差を絶えず検出し、基板温度センサの今回値が前回値に比較して大きく変化したときには、大きく変化する前の前回値を基板温度センサの基準値として記憶する。そして、基板温度センサ異常検出手段が検出した基板温度センサ異常が所定時間以上継続するまで、基板温度センサの基準値として記憶した基板温度センサの前回値を、基板温度の推定演算に使用する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサが故障して操舵トルクを検出することができなくなった場合において、SAT(セルフアライニングトルク)が弱い極低速域での操作子の切り戻し時の操舵力を低減する電動パワーステアリング装置を提供する。
【解決手段】残留切り戻し角θsc3が残った状態で切り込み方向のアシスト電流Iaがゼロ値近傍となったときに回転角検出部により検出されている回転子回転角θscを基準角度θfとして切り戻し回転角θscを検出し、切り戻し回転角θscと特性102とに基づき、切り込み方向とは逆方向の切り戻し方向にモータを駆動するようにしたので、操作子の操作角が中立位置に近づく方向にアシストが可能となり、戻し側の操舵力を低減して、操作子を中立位置付近に戻し易くすることができる。
(もっと読む)
ステアバイワイヤシステム
【課題】ステアバイワイヤシステムにおいて、ステアリングホイールの手応え感を最適に調整することにある。
【解決手段】反力発生モータ制御手段24は、異常検出手段24Bを備えるとともに、ステアリングホイール7の操作角を検出する操作角検出手段10,12に連絡し、異常検出手段24Bにより反力発生が停止する異常状態が検出されている時には操作角検出手段10,12により検出されるステアリングホイール操作角に基づいて反力発生モータ13の端子13A,13B間を断続的に短絡させる。
(もっと読む)
走行支援装置
【課題】走行支援のための走行経路の演算を容易にし、計算コストを抑制する。
【解決手段】車両進行方向の周辺環境を認識し、認識した周辺環境に対する自車位置と自車姿勢を検出し、これら周辺環境、自車位置、及び自車姿勢を対応付けた情報を予め蓄積しておく。そして、蓄積された情報を自車位置に基づいて参照することで、自車両にとって走行可能な複数の走行経路を参照経路として設定すると共に、自車位置と自車姿勢に基づいて、自車位置から各参照経路に至るまでの導入経路を算出する。そして、導入経路の算出結果に応じて、複数の参照経路のうちの一つを選択し、選択した一つの参照経路と、この参照経路に至るまでの導入経路とを合わせて最終的な自車両の走行経路を設定する。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】長い待機時間や複雑な調整作業を要することなくステアリングシャフトやモータの回転角度を検出することができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から指令が送出された場合に角度情報取得手段で情報を取得するアングルセンサ10である。角度情報取得手段は、MR素子又はHall素子を有し、外部から間欠的に供給される電力による作動する。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】消費電力を節減しながら必要なタイミングで作動してシャフトの回転角度を検出することができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から指令が送出された場合に角度情報取得手段で情報を取得するアングルセンサ10である。角度情報取得手段は、外部から間欠的に供給される電力により作動するとともに、ステアリングシャフト2の回転角速度に応じて作動時間が変化するように構成される。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】イグニション・オフ時においてもステアリングホイールの操舵角度に関連する情報を取得し続けることができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から供給される電力により作動するとともに外部から制御指令が送出された場合に角度情報取得手段で取得した情報を外部に出力するアングルセンサ10であって、制御指令が解除された場合に角度情報取得手段で取得した情報を記憶する記憶手段(集積回路12)を備える。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
車両運動制御装置
【課題】車両の走行状態に適した運動制御を、より容易に行うことのできる車両運動制御装置を提供すること。
【解決手段】車両運動制御装置2に、車両1のタイヤ温度を取得するタイヤ温度取得部50と、車両1の運動を制御する運動制御部54と、を備え、運動制御部54は、車両1の走行状態に応じて、タイヤ温度取得部50で取得したタイヤ温度に基づく運動制御と、予め定められた所定値に基づく運動制御とを切替える。これにより、タイヤ温度に基づいて運動制御を行う場合には、走行時に変化するタイヤ温度に基づいて制御することにより適切な制御を行うことができ、所定値に基づいて運動制御を行う場合には、演算時間の短縮を図ったり、ECU40の負荷を低減したりすることができる。この結果、車両1の走行状態に適した運動制御を、より容易に行うことができる。
(もっと読む)
ヨーレート較正装置
【課題】車両の走行状態における規範ヨーレート較正法だけでヨーレートセンサのゼロ点の較正ができるヨーレート較正装置を提供する。
【解決手段】ヨーレート較正装置100Aは、操舵方向を判定する操舵方向判定部15、車速演算部19、直進状態判定部12A、直進走行状態と判定された際の操舵角θHを記憶する操舵角記憶部13A、操舵角記憶部13Aに記憶された操舵角θHの値の分布に基づいて操舵角センサSHAの不感帯領域を演算する操舵角検出不感帯領域演算部14A、不感帯領域と操舵方向判定部15によって判定された操舵方向に基づいて操舵角θHを補正する操舵角補正部16、操舵角−ヨーレート特性データ104bと補正された操舵角θCHと車速VSとに基づいてヨーレートγのゼロ点を較正するヨーレートオフセット量演算部17及びヨーレートゼロ点補正部18と、を備える。
(もっと読む)
電動パワーステアリングの制御装置
【課題】低い消費電流を実現すると共に高い安全性を確保した電動パワーステアリングの制御装置を提供することを目的としている。
【解決手段】主電源がオフされている間はバッテリでバックアップされた回路200によりブラシレスモータ6のレゾルバ61を間欠励磁して回転数を計測して操舵角を算出するとともに、ブラシレスモータの起電圧に応じてゾルバ61の間欠励磁の周期を切り替えるようにして消費電流を低くし、また回転数検出回路を二重系にすることにより検出値の信頼性を向上させる。
(もっと読む)
21 - 40 / 448
[ Back to top ]