
Fターム[3D232DC10]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 履歴蓄積、記憶保持手段 (448)
Fターム[3D232DC10]に分類される特許
41 - 60 / 448
操舵装置
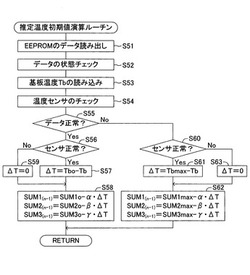
【課題】 不揮発性メモリに推定温度データを書き込むことができなかった場合でも、過熱防止機能を維持しつつ、電動モータによる操舵機能が十分得られるようにする。
【解決手段】 マイコンは、EEPROMのデータが異常である場合には、予め高温設定された仮基板温度Tbmaxから温度センサにより検出された基板温度Tbを減算した基板温度変化値ΔT(Tbmax−Tb)を使って、モータ推定温度を計算するための各仮温度値SUM1max,SUM2max,SUM3maxを補正する(S61,S62)。従って、基板温度Tbに応じた初期値SUM1(n-1),SUM2(n-1),SUM3(n-1)を設定することができる。この場合、温度センサが異常である場合には、基板温度変化値ΔT(Tbmax−Tb)を使った補正を行わない(S63)。
(もっと読む)
車両操舵装置用電動モータユニットの製造方法

【課題】電動モータのゼロ点位置とセンサのゼロ点位置との間のオフセット値を容易に求めることのできる車両操舵装置用電動モータユニットの製造方法を提供する。
【解決手段】伝達比制御モータのロータのゼロ点位置と第1レゾルバのゼロ点位置との間のオフセット値A1を設定するようになっている。具体的には、第1レゾルバを用いたフィードバック制御により、伝達比制御モータが定格出力を発生するように伝達比制御モータを駆動させる(ステップS5)。このとき、伝達比制御モータが定格出力で回転しないときには(ステップS6でNO)、オフセット値A1を変更する(ステップS8)。一方、伝達比制御モータが定格出力で回転したとき(ステップS6でYES)には、オフセット値A1の設定を完了する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助のために電動モータを駆動しつつオフセット補正値を補正することができる技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータに供給する目標電流を算出する目標電流算出部と、電動モータへ実際に供給される実電流に応じた値を出力するモータ電流検出部と、モータ電流検出部からの出力値のオフセットを予め記憶されたオフセット補正値を用いて補正し実電流を算出する補正電流算出部343と、目標電流算出部が算出した目標電流と補正電流算出部343が算出した実電流とに基づいて電動モータに印加する目標電圧を算出するPI制御部、2軸3相変換部およびV相目標電圧算出部と、算出した目標電圧を電動モータに印加して電動モータを駆動するモータ駆動部と、2軸3相変換部が算出した目標電圧に基づいてオフセット補正値を補正する補正値補正部341とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】正確に車両の横流れを検出して電流指令値を補正し、より安全で快適な直進走行が可能な電動パワーステアリング装置を提供する。
【解決手段】ステアリング機構に付加する作用力を検出する作用力検出手段と、ステアリング機構の回転角度を検出する回転角度検出手段と、作用力、回転角度及び車速に基づいて車両の走行状態を判定すると共に、走行状態の判定結果及び作用力に基づいてモータ電流補正値1を算出し、車両の電動パワーステアリングシステムがONからOFFにされたときに、モータ電流補正値1を不揮発メモリに記憶し、車両の電動パワーステアリングシステムがOFFからONにされたときに、不揮発メモリに記憶されたモータ電流補正値1を初期値として今回のモータ電流補正値2を算出し、モータ電流補正値1又は2によって電流指令値を補正するモータ電流補正値算出手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置を制御する装置が有する記憶装置の不具合を診断する際の処理負荷を低減すること。
【解決手段】CPU101、ROM102、RAM103は、電動パワーステアリング装置の制御に用いられる。ROM102やRAM103は、電動パワーステアリング装置の制御に使用される情報を格納するとともに、複数のエリアに分割されている。複数のエリアは、電動パワーステアリング装置の制御における所定の処理単位毎に対応している。CPU101は、複数のエリアのうち、制御の処理負荷に基づいて診断対象のエリアを選択し、選択したエリアを診断する。
(もっと読む)
操舵装置
【課題】補助操作によるステアリングの操作入力の0点学習を正確に行うことができる操舵装置を提供する。
【解決手段】操舵装置1は、通常の回転操作(主操作)と車両前後方向に押し引きする操作(補助操作)とが実施可能なステアリング2と、このステアリング2を押し引き方向に駆動する押し引き反力アクチュエータ8と、操舵ECU9と、シフトレバーの位置を検出するシフトセンサと、車両の車速を検出する車速センサと、エンジンを始動するためのイグニッションスイッチとを備えている。操舵ECU9は、シフトレバーの位置がPレンジにあるとき、イグニッションスイッチがOFFであるとき、車両の車速がゼロであるときに、ステアリング2の押し引き位置を基準位置(中立位置)に戻すように押し引き反力アクチュエータ8を制御する。
(もっと読む)
操舵装置
【課題】ドライバが違和感を覚えることのない、ドライバの感覚に合った操舵を行うことができるようにする。
【解決手段】予め定められたハンドルの舵角と車両に発生するヨー角速度との関係を実現することにより、ドライバの視点から見た、車両の走行する目標コース上の予め定められた前方注視時間後の目標到達点の方向θgazeβと、ハンドルの基準位置の方向δswとを一致させるように定められた、ハンドルの舵角とヨー角速度ゲインとの関係を示すマップに従って、ヨー角速度ゲインの目標値を算出し、ステアリングギヤ比を制御することにより、車両とドライバとの一体感を向上させることができる。
(もっと読む)
フォークリフト用ステアリング装置
【課題】左右独立操舵可能でありながら、一つの転舵用モータが故障した場合でも操舵不能とならないフェールセーフ機構を有するフォークリフト用ステアリング装置を提供することを目的とする。
【解決手段】車両の操舵を行なう操舵機構と、操舵機構とは機械的に接続されていない転舵輪を転舵する複数の転舵機構と、転舵機構は電動モータを動力源とする転舵用アクチュエータを個別に備え、転舵輪を転舵するステアリング装置に於いて、転舵機構は各々異なった操舵角で独立に転舵輪を転舵できるように構成されており、且つ転舵用アクチュエータに異常が発生した場合、一方の転舵用アクチュエータの駆動力を他方の転舵用アクチュエータに機械的に伝達するフェールセーフ機構を具備することを特徴とする。
(もっと読む)
モータ駆動制御装置及びこれを使用した電動パワーステアリング装置
【課題】電圧利用率を改善しつつ、デューティ制約を満たすことができるモータ駆動制御装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】直流電源41に接続された3相モータ12を駆動するモータ駆動回路40と、3相モータのモータ電流を検出する単一のモータ電流検出部42と、モータ電流検出値に基づいて3相モータの各相電流値を求める各相電流演算部35と、電流指令値を演算するモータ電流指令部34と、演算した電流指令値と前記各相電流値との電流偏差に応じて3相駆動電圧値を演算する3相駆動電圧演算部37と、電圧利用率改善及び3相駆動電圧波形補正を行う補正演算式に従って前記3相駆動電圧値を補正して3相駆動電圧補正値を演算する3相駆動電圧補正部38と、演算した3相駆動電圧補正値に基づいて前記モータ駆動回路を制御するパルス幅変調信号を生成するパルス幅変調信号生成部39とを備えている。
(もっと読む)
電動パワーステアリング装置、電動パワーステアリング装置の制御方法およびプログラム
【課題】電動モータに過剰に電流が流れることに起因して電動モータが故障することをより精度高く抑制することができる技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、ステアリングホイールの操舵トルクに基づいて電動モータに供給する目標電流を算出する目標電流決定部25と、電動モータの回転速度が予め定められた回転速度よりも小さいときに電動モータに供給された実電流および実電流が供給された時間に基づいて目標電流決定部25が算出した目標電流を小さくするように補正する補正部27とを備える。
(もっと読む)
運転者支援システムのための実世界の交通場面からの視覚特性の行動ベース学習
【課題】運転者支援システムをセットアップおよび運用するための、コンピュータに実装される方法を提供する。
【解決手段】車両の環境を視覚感知するステップと、車両のマン・マシン・インタフェースを操作している運転者の影響を受ける可能性がある、車両の状態を表すパラメータの少なくとも1つの変化率を感知するステップと、感知された変化率の特定のカテゴリに関連付けられ、したがって、運転者の特定行動に関連付けられた視覚的特徴を見つけるために、視覚感知によって収集された情報を、少なくとも1つの感知された変化率をその様々なカテゴリに分類することによって構造化するステップと、を含む。
(もっと読む)
走行路逸脱防止装置及びそれを備えた車両
【課題】走行路逸脱防止制御において、運転者の操作意図がない状態で車両の走行路逸脱を防止するためアクチュエータが作動した場合に、運転者の操作意図があると誤判断して逸脱防止制御が中断することを防止すること。
【解決手段】各センサやカメラ等の検出手段の結果に基づいて走行路外への逸脱防止制御を行う逸脱防止制御手段と、運転者の操舵意図を判定する運転意思判定手段と、運転意思判定手段からの運転者の操舵意図に基づいてアクチュエータの作動を規制するアクチュエータ作動規制手段とを有し、運転意思判定手段は、検知した操舵トルクの変化量ΔTh及び操舵アクチュエータへの制御指令値の変化量ΔTsとを算出し|ΔTh|−|ΔTs|が閾値以上の場合に運転者の操作意図があると判断して逸脱防止制御の作動を制限する。
(もっと読む)
モータ制御装置及びそれを用いた電動パワーステアリング装置
【課題】単一の電流検出器を用いてモータ相電流を検出し、ソフトウェア負荷を高めることなく、最大Dutyが100%となったときにも電流検出時間を確保するためのDuty変更を行うことができ、電流検出が可能なDuty範囲を狭くすることがなく、コンパクト化、軽量化、コストダウンを図ったモータ制御装置及びそれを用いた電動パワーステアリング装置を提供する。
【解決手段】電流検出周期では、最大Duty又は中間Dutyを基準Dutyとして、1相ON時間及び2相ON時間が電流検出に必要な時間となるように各相Duty指令値を変更して検出用各相Duty指令値とし、Duty調整周期では、n回平均DutyがDuty指令値と一致するように、電流検出周期に変更した各相Dutyの増減分を1/(n−1)した値を各相Duty指令値に加算して調整用各相Duty指令値とする。
(もっと読む)
電動パワーステアリング装置
【課題】操舵フィーリングを向上させることができる電動パワーステアリング装置を提供することを課題とする。
【解決手段】基本アシスト指令値決定手段201にフリクションを補償するためのフリクション補償値を決定するフリクション補償値決定手段220と、ステアリングホイール2の操舵角を検出する操舵角検出手段37と、操舵角検出手段37からの信号に基づきステアリングホイール2の回転速度を算出する舵角速度算出手段240を有し、往き状態時と戻り状態時のフリクション補償値決定手段220からのフリクション補償値を操舵角が大きくなるに従って大きくしたことを特徴とする。
(もっと読む)
モータ制御装置、電動パワーステアリング装置及び車両用操舵装置
【課題】簡素な構成にて、過電流の発生が回路に与える影響を有効に排除することが可能なモータ制御装置、電動パワーステアリング及び車両用操舵装置を提供すること。
【解決手段】プリドライバ22の給電線Lp2には、電源遮断手段としてのリレー回路40が設けられる。そして、同リレー回路40は、マイコン21の出力するリレー信号S_rlyにより、その作動が制御される。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助力に関して、運転者の意図に反応する電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置は、アクセル開度の変化率、ブレーキ圧の変化率、及び、横加速度等の、車両の運転状況に関する複数のデータを取得するデータ取得部11mと、複数のデータをそれぞれ正規化してそれらの中から現在の最大値を求め、当該最大値を運転者の意図として判定する意図判定部11nと、操舵補助力を生じさせるにあたって、意図判定部11nによる判定結果に応じてアシスト特性を変更する制御部11kとを備えたものである。そして、意図判定部11nにより、運転者がどのような運転をしようとしているかについての意図を判定し、その判定結果に応じてアシスト特性を変更するので、運転者の意図に沿うように反応する操舵補助を行うことができる。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】回転角推定部29によって演算されるロータ50の推定回転角θEと、舵角センサ4によって検出されるステアリングホイール10の検出操舵角θSとに基づいて推定操舵トルクTEを演算する操舵トルク推定部64が備えられている。センサ故障検出部61によってトルクセンサ1の故障が検出されていない場合には、指示操舵トルク設定部21によって設定される指示操舵トルクT*と、トルクセンサ1から出力され、操舵トルクリミッタ20による制限処理を受けた検出操舵トルクTSとの偏差に応じて加算角αが演算される。一方、トルクセンサ1の故障が検出されている場合には、指示操舵トルクT*と、操舵トルク推定部64によって演算される推定操舵トルクTEとの偏差に応じて加算角αが演算される。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。速度推定オブザーバ43は、演算周期毎にロータ角速度ωn(演算周期当たりのロータ角変位に相当する)を求める。ロータ角速度補正部42は、指示電流値Iγδ*が急変した場合には、所要期間、指示電流値の急変直前に速度推定用オブザーバ43によって演算されていたロータ角速度と、指示電流値の急変後に速度推定用オブザーバ43によって演算されるロータ角速度とに基づいて、最終的なロータ角速度ωFを演算する。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 転舵用モータが失陥しても転舵を行うことができ、かつトー角調整用モータが失陥してもトー角調整機構を固定して安全に走行でき、構成がコンパクトで車両に搭載しやすいステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用モータ6の回転を転舵軸10に伝える転舵動力伝達機構18と、トー角調整用モータ7の回転によりトー角を調整させるトー角調整動力伝達機構30と、転舵用モータ6またはトー角調整用モータ7の失陥時に、各モータ6,7の動力伝達経路を適宜切り換えて転舵を可能にする切換機構17とを備える。転舵軸10は、軸方向に2分割された非回転分割軸10Aと回転分割軸10Bをねじ結合部10Cで互いに結合してなる。両分割軸10A,10Bを一体に軸方向移動させて転舵する。回転分割軸10Bを回転させて、ねじ結合部10Cの螺合長さを調整することで、トー角を調整する。
(もっと読む)
電動パワーステアリング装置
【課題】ブラシレスモータの相間短絡を迅速に判定し、かつ、相間短絡が発生しても継続して操舵アシスト制御が可能な技術を提供する。
【解決手段】電動パワーステアリング装置は、相電流が、所定の短絡による過電流の状態と所定の回生による過電流の状態とを、交互に繰り返す発振状態に至ったと判定したときに、制御部51内に、前記短絡が発生したと判定する相間短絡判定部と、相間短絡判定部で判定された結果に基づき相間短絡発生相を検出し、この相間短絡発生相に接続されるスイッチング素子のデューティを制限してスイッチング素子の過電流発生を抑制し、操舵アシスト制御を継続して行う操舵アシスト制御部とを有する。
(もっと読む)
41 - 60 / 448
[ Back to top ]