
Fターム[3D232DE02]の内容
走行状態に応じる操向制御 (73,124) | 制御出力パターン (1,729) | 漸増減 (378)
Fターム[3D232DE02]に分類される特許
61 - 80 / 378
ドライバ覚醒装置
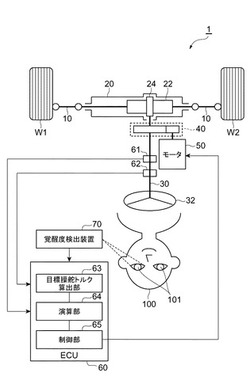
【課題】ドライバを効果的に覚醒させることができるドライバ覚醒装置を提供する。
【解決手段】覚醒度検出装置70によってドライバ100の覚醒度の低下が検出されたときに、演算部64によって、目標操舵トルク算出部63によって算出された目標操舵トルクに、操舵角センサ62によって検出された操舵角の時間変化の2階微分値を加算して覚醒度低下時目標操舵トルクが算出され、算出された覚醒度低下時目標操舵トルクから操舵トルクセンサ61によって検出された操舵トルクを減算することにより、目標アシストトルクが算出される。制御部65が、演算部64によって算出された目標アシストトルクに基づいて、転舵輪(左車輪W1,右車輪W2)を転舵させるモータ50を制御する。
(もっと読む)
車両のパワーステアリング制御装置

【課題】左操舵時における左操舵特性と右操舵時における右操舵特性とを車両挙動を考慮して差が生じないように適切に維持してステアリングシステムとしての基本的な信頼性を容易に維持する。
【解決手段】検出される操舵トルクTsを線形化し、該線形化した操舵トルクThに対する横加速度Ayの特性を操舵特性として取得して、この操舵特性の左操舵特性と右操舵特性のそれぞれについて、線形化した操舵トルクThに対する横加速度Ayの変化率PL、PRを演算し、これら変化率PL、PRの差に基づいて基本アシストトルクTbを補正してアシストトルクTaを演算し、モータ駆動部21に出力して電動モータ12を駆動して操舵力をアシストする。
(もっと読む)
車両運動制御装置
【課題】制御対象の運動範囲が大きい場合であっても、最適な運動性能となるように車両の運動を制御する車両運動制御装置を提供する。
【解決手段】車両運動制御装置は、ヨーモーメント発生機構10と、状態センサ20と、制御部30とからなる。ヨーモーメント発生機構10は、車両の目標状態量を決定し車両にヨーモーメントを発生させる。状態センサは、ヨーモーメント発生機構による車両の現状態量及び現ヨーモーメントを計測又は推定する。制御部30は、目標状態量と車両の現状態量の偏差に現ヨーモーメントを乗算する仮想パワーgを考慮する制御則Uを用いてフィードバック制御を行う。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングモードをスムーズに切替えることができ、且つ、CPUの演算処理の負荷を軽減できる電動パワーステアリング装置を提供することにある。
【解決手段】
ステアリングにかかる操舵トルクを検出する操舵トルク検出手段と、車速を検出する車速検出手段と、ハンドルの操舵をアシストするアシスト力を発生するモータと、操舵トルク及び車速に基づいてモータを制御するモータ制御手段とを備えた電動パワーステアリング装置において、モータ制御手段が、ステアリングモード切替信号が入力されたときに、各ステアリングモードの代替車速と車速との対応関係を示す擬似車速パラメータを用いて車速を代替車速に変換する車速切替手段を備え、変換された代替車速に基づいてアシスト制御を行う。
(もっと読む)
操舵装置
【課題】 車両と他の物体との接触やエアバッグの展開などのステアリングに対して外力が作用する場合に、ドライバが操作するステアリングの操作性を向上させることができる操舵装置を提供する。
【解決手段】 操舵ECU30は、車両Mと車両Mの周囲における障害物との接触の可能性を算出し、さらに接触回避可能性を算出する。ここで接触回避可能性が所定のしきい値を超える場合に、ステアリングホイール12における押し引き方向DS1および揺動方向DS2などの副操作方向への動作を規制する。
(もっと読む)
電動アクチュエータ制御装置およびこれを備えた車両の後輪トー角制御装置
【課題】後輪トー角制御装置において、作動量検出手段が故障した際に故障判定期間中に車両の走行フィールが悪化することを抑制する。
【解決手段】設定した制御指示値および作動量検出手段による実測値に基づいて電動アクチュエータ11を制御する後輪トー角制御装置10であって、ストロークセンサ17による実測値と制御指示値との差が所定の閾値S以上あり、且つストロークセンサ17による実測値が変化しない場合に故障が疑われる異常状態と判定し、異常状態が第1判定時間T1にわたって継続した場合にストロークセンサ17の故障と判定するものであり、異常状態が判定された場合、ストロークセンサ17の故障が判定される前に電動アクチュエータ11の作動を停止させるように構成する。
(もっと読む)
電動パワーステアリング装置
【課題】一のセンサ信号に基づく操舵トルクの検出時において、より安定的にアシスト力付与を継続することができる電動パワーステアリング装置を提供すること。
【解決手段】ECUは、故障が検出されていない方のセンサ素子が出力するセンサ信号(残存センサ信号)を用いたアシスト継続制御の実行時には、そのアシスト力の変化方向に関係して、周期的に瞬発的なモータトルクを操舵系に印加すべくEPSアクチュエータの作動を制御する。そして、この瞬発的なモータトルクの印加が、そのアシスト継続制御の基礎となる残存センサ信号に反映されるか否かに基づいて、当該残存センサ信号の異常を検出する。
(もっと読む)
電動パワーステアリング装置
【課題】一のセンサ信号に基づく操舵トルクの検出時において、より安定的にアシスト力付与を継続することができる電動パワーステアリング装置を提供すること。
【解決手段】ECUは、故障が検出されていない方のセンサ素子が出力するセンサ信号(残存センサ信号)を用いたアシスト継続制御の実行時には、そのアシスト力の変化方向に関係して、周期的に瞬発的なモータトルクを操舵系に印加すべくEPSアクチュエータの作動を制御する。そして、この瞬発的なモータトルクの印加が、そのアシスト継続制御の基礎となる残存センサ信号に反映されるか否かに基づいて、当該残存センサ信号の異常を検出する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置およびそれを備えた車両用操舵装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTを指示操舵トルクT*に近づけるように、PI制御部23によって、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。ゲイン変更部40は、PI制御部23の比例ゲインKPを、γ軸指示電流値Iγ*が大きいほど小さくなる特性に従って可変設定する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助力に関して、運転者の意図に反応する電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置は、アクセル開度の変化率、ブレーキ圧の変化率、及び、横加速度等の、車両の運転状況に関する複数のデータを取得するデータ取得部11mと、複数のデータをそれぞれ正規化してそれらの中から現在の最大値を求め、当該最大値を運転者の意図として判定する意図判定部11nと、操舵補助力を生じさせるにあたって、意図判定部11nによる判定結果に応じてアシスト特性を変更する制御部11kとを備えたものである。そして、意図判定部11nにより、運転者がどのような運転をしようとしているかについての意図を判定し、その判定結果に応じてアシスト特性を変更するので、運転者の意図に沿うように反応する操舵補助を行うことができる。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】加算角補正部25は、モータ推定温度が第1の所定温度以上となると、インターバル時間毎に、加算角リミッタ24から出力される加算角αの絶対値を一時的に低減させる。また、加算角補正部25は、インターバル時間を、モータ推定温度が高いほど短くする。そして、インターバル時間が所定のしきい値以下になると、すなわち、モータ推定温度が第1の所定温度より高い第2の所定温度以上となると、加算角補正部25は、指示電流値変更部31に電流停止指令を通知する。これにより、γ軸指示電流値Iγ*が零にされ、操舵モードがマニュアルステアモードとなる。
(もっと読む)
過熱保護装置
【課題】簡単な制御プログラムで温度センサを用いずにパワーアシストモータおよびコントローラの温度を推定して過熱保護を図る装置を提供する。
【解決手段】発熱量算出部101は、供給電流に基づいてモータ82の発熱量Qを算出する。発熱量Qの積算値である温度推定値Tに対応する電流上限値を設定した電流上限マップ108と、温度推定値Tに対応するレシオを設定したレシオマップ105とを有し、2つのマップ105、108を使用して決定された制限電流値のうち小さい方でモータ82の通電を制限する。発熱量算出部101は、発熱補正項と、発熱量の積算値Tdとモータ周囲温度Tmとの差の関数を減算項として算出する放熱補正項とからなる発熱量算出式を含む。モータコントロールユニット93との温度相関が高いモータ周囲温度Tmが、比較温度以上となった場合には、発熱量算出式から放熱補正項を削除した算出式で発熱量Qを算出する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】モータ制御停止・再開タイミング検出部41は、モータ制御を停止させるべきタイミングと、モータ制御停止後においてモータ制御を再開させるべきタイミングとを検出する。モータ制御停止処理部43は、モータ制御停止・再開タイミング検出部41によってモータ制御停止タイミングが検出されたときに、制限値ωmaxを0まで漸減させた後に、指示電流値Iγ*を所定値以下となるまで漸減させる。モータ制御再開処理部44は、モータ制御停止・再開タイミング検出部41によってモータ制御再開タイミングが検出されたときに、制限値ωmaxを0に固定した状態で、指示電流値Iγ*を所定値以上となるまで漸増させた後に、制限値ωmaxを所定値以上となるまで漸増させる。
(もっと読む)
電動パワーステアリング装置
【課題】別途センサを設けることなく、前輪軸に掛かる負荷の変化を検出して操舵系に与える操舵補助力を適正に補正する。
【解決手段】操舵系の操舵トルクを検出する操舵トルク検出部3と、操舵系に対して操舵補助力を発生する電動モータ12と、少なくとも操舵トルクに基づいて操舵補助指令値を算出する操舵補助指令値制御部21と、操舵補助電流指令値に基づいて前記電動モータを駆動制御するモータ制御部30と、操舵系の操舵角を検出する操舵角検出部13と、電動モータ12のモータ電流を検出するモータ電流検出部31と、操舵角とモータ電流との対応関係を表す基準操舵特性を記憶する基準特性記憶部23と、検出したモータ電流と操舵角とをもとに前記基準操舵特性を参照して前輪軸負荷を推定する軸負荷推定部22と、該軸負荷推定部22で推定した前輪軸負荷に基づいて前記操舵補助指令値を補正する指令値補正部24とを備えている。
(もっと読む)
電動パワーステアリング装置
【課題】一のセンサ信号に基づく操舵トルクの検出時において、より安定的にアシスト力付与を継続することのできる電動パワーステアリング装置を提供すること。
【解決手段】ECUは、故障が検出されていない方のセンサ素子が出力するセンサ信号(残存センサ信号)を用いたアシスト継続制御の実行時には、そのアシスト力の付与とは無関係に、周期的に瞬発的なモータトルクを操舵系に印加すべくEPSアクチュエータの作動を制御する。そして、この瞬発的なモータトルクの印加が、そのアシスト継続制御の基礎となる残存センサ信号に反映されるか否かに基づいて、当該残存センサ信号の異常を検出する。
(もっと読む)
電動パワーステアリング装置
【課題】タイヤが縁石に当接した場合でもトルク伝達部材に伝達される衝撃力を確実に抑制することができる電動パワーステアリング装置を提供すること。
【解決手段】モータ回転角速度ω及びモータ回転角加速度αのそれぞれが、対応する所定値ωs、αs以上の場合、異常外力判定部は、所定値以上の外力がステアリング機構に入力されたと判定して、異常外力判定フラグ(FLG)を1にする。d軸電流指令値演算部は、入力される異常外力判定フラグ(FLG)が1の場合、モータ回転角速度減速部を有効とし、モータ回転速度/d軸電流指令値マップに基づいて強め界磁制御を行う。
(もっと読む)
電動パワーステアリング装置
【課題】回転位置検出部毎の異常検出を行うことなく、回転位置検出部の異常を即座に正確に検出することができる電動パワーステアリング装置を提供する。
【解決手段】電動モータの回転位置に応じて2値の回転位置信号を出力する複数の位置検出手段と、前記複数の位置検出手段から出力される回転位置信号に基づいて状態関数を所定時間毎に演算して回転位置情報を算出する状態関数演算手段(ステップS14)と、前記電動モータの回転方向を検出する回転方向検出手段と、前記回転位置情報及び前記回転方向に基づいて次に出力される回転位置検出手段の回転位置信号を予測する出力信号予測手段(ステップS15)と、該出力信号予測手段で予測した回転位置信号が所定時間内に検出されないときに、該当する回転位置検出手段の異常と判定する異常判定手段(ステップS17〜S22)とを備えた。
(もっと読む)
車両走行支援装置
【課題】車両特性の変化を直接的に解析することなく、車両移動量の推定精度の向上を図る。
【解決手段】経路演算部12は、車輪速センサ21によって検出された車輪速に基づいて車両の走行軌跡の曲率ρvを算出するとともに、舵角センサ28によって検出された前輪の転舵角δとに基づいて曲率ρstを算出する。また、経路演算部12は、算出した各曲率ρv,ρstの信頼度をそれぞれ評価し、この評価結果に基づいて微小時間の曲率を決定する。そして、経路演算部12は、決定された所定区間の移動量に基づいて自車両の自己位置を推定する。
(もっと読む)
操舵制御装置、角度検出装置および操舵制御装置付き車両
【課題】 操向輪側に設置するレゾルバの数を少なくするとともに、転舵角度を検出することができる操舵制御装置、角度検出装置および操舵制御装置付き車両を提供すること。
【解決手段】 操舵絶対角度検出手段が検出した操舵絶対角度と偏差記憶手段が記憶する操舵絶対角度と転舵絶対角度との偏差との和と、操向輪の転舵角度範囲内の角度を複数の周期で検出する転舵角度検出手段が制御開始時に検出した初期値との差をオフセット量として求め、転舵角度検出手段が検出した転舵角度とオフセット量の和を転舵絶対角度として算出するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて、トルクセンサ異常時の代替的なアシスト制御時においても安定的にアシスト力付与を継続することのできる電動パワーステアリングを提供すること。
【解決手段】セルフステア抑制制御部52は、モータ21の回転角速度ωmに基づいてセ
ルフステアの発生を判定するセルフステア判定部53を備え、相セルフステアが発生したと判定した場合には、操舵系に付与するアシスト力を低減するセルフステア抑制制御を実行する。また、セルフステア抑制制御部52は、運転者によるステアリング操作の状態が保舵状態であるか否かを判定してその継続時間Tstbを測定する保舵継続時間測定部57
と、当該継続時間Tstbに基づいて、上記セルフステア判定に用いる閾値ωthを演算する
閾値演算部58とを備える。そして、閾値演算部58は、その保舵状態の継続時間Tstb
の増大に従って低下する閾値ωthを演算する。
(もっと読む)
61 - 80 / 378
[ Back to top ]