
Fターム[3D232DE02]の内容
走行状態に応じる操向制御 (73,124) | 制御出力パターン (1,729) | 漸増減 (378)
Fターム[3D232DE02]に分類される特許
41 - 60 / 378
車両の操舵力制御装置
【課題】制動制御によって操向車輪に制動力の左右差が発生している際における操向車輪のセルフアライニングトルクの変化を打ち消し得る車両の操舵力制御装置の提供。
【解決手段】この装置では、車両の運転者による制動操作に依存することなく車両の状態に基づく制動制御によって操向車輪に付与される制動力(Bq[f*])が調整される。車両の操舵操作部材に操舵力を付与する操舵力発生手段(TQ)が備えられる。制動制御によって操向車輪に付与される制動力(Bq[f*])の左右差(ΔBq)に基づいて、操舵力発生手段(TQ)により操舵操作部材に付与される操舵力が調整される。この操舵力は、操向車輪に付与される制動力(Bq[f*])の左右差(ΔBq)が大きいほど、より大きい値に調整される。
(もっと読む)
電動パワーステアリング装置

【課題】様々な状況にかかわらず、操舵トルク信号のノイズを低減することができる電動パワーステアリング装置を提供する。
【解決手段】車両の操舵系に設けられたトーションバー2bで連結した入力軸2a及び出力軸2cの回転角を個別に検出する入力軸回転角検出手段15及び出力軸回転角検出手段16を有するトルク検出手段14と、該トルク検出手段14で検出したトルク検出値に基づいて制御され、前記出力軸に対して操舵補助力を発生する電動モータ12とを備えた電動パワーステアリング装置であって、前記電動モータ12のモータ回転角を検出するモータ回転角検出手段17と、前記出力軸回転角検出手段16で検出した出力軸回転角信号に対して、前記モータ回転角検出手段で検出したモータ回転角を使用してノイズ低減を行うノイズ抑制手段20aとを備えている。
(もっと読む)
電動パワーステアリング装置
【課題】センサ異常が発生した場合に、残りの入力軸回転角センサ及び出力軸回転角センサを使用してトルク検出値を算出できる電動パワーステアリング装置を提供する。
【解決手段】入力軸2aの回転角を検出して操舵角を検出する操舵角検出手段13と、電動モータ12のモータ回転角を検出するレゾルバ17とを備え、トルク検出手段14は、複数組の入力軸回転角センサ15a,15b及び出力軸回転角センサ16a,16bを有し、前記各回転角センサの異常を検出するセンサ異常検出手段44と、該センサ異常検出手段で、前記入力軸回転角センサ及び前記出力軸回転角センサの少なくとも1以上の異常を検出したときに、代替え回転角センサの有無を判断し、前記代替え回転角センサが有るときには当該代替えセンサの検出信号で代替えし、前記代替え回転角センサが無いときには前記操舵角検出手段及び前記レゾルバの一方で代替えする代替え制御手段43とを備えた。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度に異常が発生した場合でも、セルフステアの発生や制御異常出力を確実に防止する電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、前記操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と、前記車輪回転速度、正常時の前記操舵トルク及び前記モータ回転情報の少なくとも一つに基づいて前記車輪回転速度の異常を検出する車輪回転速度異常検出手段と、前記車輪回転速度の異常を検出した場合、前記異常時切換手段で前記第2のトルク指令値を選択するときに、当該第2のトルク指令値を制限する異常時指令値制限手段41とを備えている。
(もっと読む)
操舵装置
【課題】運転者による操舵ハンドルの操作に基づいて、車両が走行する道路の環境を特定し、道路の環境に応じた操舵制御を行う。
【解決手段】操舵装置は、運転者が操舵ハンドルを操作する操作量(例えば操舵角、操舵トルク、操舵速度など)と、所定期間における操作量の変化(例えば操作量の経時変化や周波数変化など)とに基づいて、車両が走行する道路の環境を特定する特定手段を備え、該道路の環境に応じた操舵制御を行うことが可能な操舵装置を提供する。
(もっと読む)
ステアバイワイヤ式のステアリング装置
【課題】減速旋回中において、減速旋回中に車両に作用する遠心力が一定になるように操舵輪の操舵角の制御を行う。
【解決手段】ステアバイワイヤ式のステアリング装置は、ハンドル20の旋回角φを検出する旋回角検出センサ32と、操舵輪30の操舵角θを検出する操舵角センサ32と、操舵輪30を駆動する操舵駆動装置3と、操舵駆動装置3を制御する制御装置4とを備え、ハンドル20の旋回に応じて操舵輪30を操舵方向に駆動する。ステアリング装置は、車両の速度Vが旋回角φに応じて設定された制限速度より大きいときに、車両の速度Vを制限速度まで減速する減速手段を備える。そして、この減速手段により減速旋回しているときに、車両に作用する遠心力が一定となるように操舵角θをハンドル20の旋回角φに応じた所定角度まで大きくする。
(もっと読む)
車両の挙動制御装置及び車両の挙動制御方法
【課題】車両の挙動を制御させるための複数の制御対象の制御要求値を適切に設定することができる車両の挙動制御装置及び車両の挙動制御方法を提供する。
【解決手段】要求値設定部26は、第1の制御対象に対する第1要求ヨーレートγ_act1を設定する第1要求値設定部40と、第1要求ヨーレートγ_act1に基づき駆動する第1の制御対象の第1ヨーレート推定値γs_act1を取得する第1推定値取得部41と、第1定常不足量TF1及び第1推定遅れ量SF1のうち少なくとも第1推定遅れ量SF1を算出する第1算出部42と、第2の制御対象に対する第2要求ヨーレートγ_act2を設定する第2要求値設定部43と、第2要求ヨーレートγ_act2に基づき駆動する第2の制御対象の第2ヨーレート推定値γs_act2を取得する第2推定値取得部44とを備えている。
(もっと読む)
ステアバイワイヤシステム
【課題】車両走行中はステアリングホイールの操作角と操舵輪の操舵角とを整合させず、停車中にステアリングホイールの操作角と操舵輪の操舵角とを整合させる。
【解決手段】ステアリングホイールと操舵輪とが機械的に切り離され、ステアリングホイールの操作角を検出する操作角検出手段と、操舵輪の操舵角を検出する操舵角検出手段とを備え、ステアバイワイヤシステム起動時、操作角検出手段により検出された操作角と操舵角検出手段により検出された操舵角とにずれが生じている場合、操作角と操舵角とを整合させる制御手段を備えるステアバイワイヤシステムにおいて、車両速度を検出する車速検出手段を備え、制御手段は、ステアバイワイヤシステム起動後、前記車速検出手段により検出された車両速度が略0になった時に、操作角と操舵角とを整合させる。
(もっと読む)
電動パワーステアリング装置
【課題】モータを駆動する各相電流指令値のゼロクロス時においても、モータからの振動及び異音が発生することがなく、操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】デッドタイム補償演算手段は、各相電流指令値がゼロ値を含む所定範囲内にある場合には、デッドタイム補償量の加算又は減算によってデッドタイムを補償するデッドタイム補償を行わず、電流フィードバック制御に用いるフィードバックゲインを、各相電流指令値が所定範囲外にある場合に比べて大きくする。
(もっと読む)
電動パワーステアリング装置
【課題】モータを駆動する各相電流指令値のゼロクロス時においても、モータからの振動及び異音が発生することがなく、操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】デッドタイム補償演算手段は、各相電流指令値がゼロ近傍の所定範囲内にある場合には、モータの回転角速度に応じて各相のデッドタイム補償量を変え、回転角速度の絶対値が所定値より小さい場合には、回転角速度の絶対値が小さくなるに従い、各相のデッドタイム補償量を漸減させる。
(もっと読む)
操舵制御装置
【課題】道路状態や走行状態に応じた目標舵角を設定し、この目標舵角に近づくように操舵反力トルクの制御や、自動操舵の制御時、ドライバの操舵による負担を低減する操舵制御装置を提供する。
【解決手段】操向輪の転舵角と走行路形状に応じた転舵角である目標転舵角との差が小さくなる方向に、操向輪の転舵角が変化しているときには、操舵量に対して転舵量が大きくなるようにする。
(もっと読む)
電動機駆動装置、および、これを用いた電動パワーステアリング装置
【課題】いずれかのインバータまたは巻線組が故障したとき、運転者に確実に故障の発生を気付かせる電動機駆動装置を提供する。
【解決手段】2つのインバータおよび2組の巻線組を備える2系統の電動機駆動装置においていずれか1系統のインバータまたは巻線組の故障を検出したとき(S20YES)、故障系統の電源リレーを遮断し(S50)、正常系統の電流供給制限値を徐々にゼロまで低減する(S60)。その後、操舵トルクが所定の閾値を超えたとき(S70YES)、正常系統の電流供給制限値を所定量増加する(S80)。正常系統の電流供給制限値が最大電流制限値に達したとき、電流供給制限値の増加を中止する(S90)。電流供給制限値を一旦ゼロまで低減させた後、徐々に操舵アシストトルクが発生する状況を作り出すことで、運転者に操舵トルクの変化を感じさせ、確実に故障発生を気付かせることができる。
(もっと読む)
電動パワーステアリング装置
【課題】ボール螺子装置に起因した非追従状態の発生に伴う急峻且つ瞬間的な操舵トルクの変動を緩和して、より良好な操舵フィーリングを実現することのできる電動パワーステアリング装置を提供すること。
【解決手段】追従補償制御部は、ステアリングシャフトにおけるトーションバーよりもステアリング側の第1回転角θsが継続的且つ一方向に変化する状態にあるにもかかわらず、そのトーションバーよりもラック軸側の第2回転角θpが変化しない場合に、ボール螺子装置に起因する非追従状態が発生したものと判定する。そして、操舵系に付与するアシスト力を増大させるべく、その出力する追従補償制御量(の絶対値)を増加する。
(もっと読む)
電動パワーステアリング装置
【課題】開始判定の精度を低下させることなく修正操舵後の速やかな補償成分の重畳再開を可能として、より好適に運転者の負担を軽減することのできる電動パワーステアリングを提供すること。
【解決手段】リードプル補償制御部は、車両が直進状態から非直進状態へと移行した場合には、そのLP制御量Ilp*の出力を停止する。また、リードプル補償制御部は、非直進状態への移行後、復帰判定期間t0を設定するとともに、当該復帰判定期間t0内に非直進状態から直進状態への復帰があるか否かを判定し、その復帰があった場合には、開始判定期間T1よりも短い再開判定期間T2を設定する(T2<T1)。そして、この再開判定期間T2を超えて直線状態が継続することを条件にLP制御量Ilp*の出力を再開する。
(もっと読む)
車両用操舵制御装置
【課題】クラッチ締結時間の変動にかかわらずバックアップクラッチが実際に締結されたことを的確に判定することで、実際に締結された直後からスムーズなハンドル操作モードへ移行することができる車両用操舵制御装置を提供する。
【解決手段】操舵ハンドルとは機械的に切り離され、操舵ハンドルの操作状態に応じて左右前輪を転舵する舵取り機構と、前記操舵ハンドルと前記舵取り機構とを締結により機械的に連結するバックアップクラッチと、前記バックアップクラッチの開放状態で、前記バックアップクラッチの締結条件が成立すると、前記バックアップクラッチに対し締結指令を出力するクラッチ締結指令手段(ステップS104)と、前記バックアップクラッチに対し締結指令が出力された後、前記操舵ハンドルのトルク増加が検出されたとき、前記バックアップクラッチが締結状態になったと判定するクラッチ締結判定手段(ステップS105)と、を備えた。
(もっと読む)
狭路走行支援装置、狭路走行支援方法
【課題】狭路を走行する際に、運転者に対して適切なステアリング操作を直感的に促す。
【解決手段】ソナー11L及び11Rによって、走路境界との距離yL及びyRを検出し、検出結果に応じて狭路支援制御の介入が必要か否かを判断する(S103)。制御介入が必要であると判断したら、最終トルク指令値Ifに対して制御介入し、操舵支援を行う(S105)。ここでは、回避トルク指令値Iaと助勢トルク指令値Isとの加算によって最終トルク指令値Ifを演算する(S205)。回避トルク指令値Iaは、走路境界から離れる方向の支援トルクとなる。一方、助勢トルク指令値Isは、運転者の操舵方向と同一の支援トルクとなるので、運転者の操舵方向が走路境界に向かっていれば、この助勢トルク指令値Isを減少補正することで、走路境界に対する接近が抑制される。
(もっと読む)
伝達比可変装置及び車両用操舵装置
【課題】高負荷状態におけるロック作動時においても良好な操舵フィーリングを維持することのできる伝達比可変装置を提供すること。
【解決手段】ECUは、モータの負荷状態を判定する負荷判定手段としての機能を備える。そして、モータが高負荷状態にあると判定された場合には、その負荷トルクに抗する方向にモータを駆動した後の回転位置において、ロックレバー33をロックホルダ32の係合溝31に係合、詳しくは、その深溝31bに嵌合させるべく、モータ及びロック装置の作動を制御する(抗負荷トルクロック制御)。
(もっと読む)
車両用操舵装置
【課題】伝達比可変装置の機能に制約を加えることなく当該伝達比可変装置の作動時においても良好な操舵フィーリングを実現することのできる車両用操舵装置を提供すること。
【解決手段】EPSECU18側のマイコン41には、F/Bゲイン演算部50が設けられるとともに、同マイコン41は、このF/Bゲイン演算部50が演算するフィードバックゲイン(比例ゲインKp及び積分ゲインKi)を用いた電流フィードバック制御の実行によりモータ制御信号を生成する。また、このマイコン41には、IFSECU8側(のマイコン31)において検出(演算)された転舵角速度ωtが入力される。そして、上記F/Bゲイン演算部50は、その転舵角速度ωtに応じてフィードバックゲインを可変する。
(もっと読む)
モータ制御方法、モータ制御装置、および、これを用いた電動パワーステアリング装置
【課題】デッドタイム補償制御での零クロス点近傍におけるトルクリップルを抑制し得るモータ制御方法およびモータ制御装置を提供する。
【解決手段】3相モータをインバータ駆動するモータ制御方法において、上下MOSが共にオフするデッドタイムによる出力電圧の損失を補償するデッドタイム補償が行われる。例えばU相のPMW指令値PMWu*に対し、0°〜60°および120°〜180°の範囲では基準値Vs、60°〜120°の範囲では基準値の2倍値2Vsのデッドタイム補償量が段階的に与えられ、補償後のPWM電圧PWMuがインバータに出力される。これにより、0°〜180°の範囲で一定量のデッドタイム補償量が与えられる場合と比べて、零クロス点である0°と180°におけるステップ状の変化を相対的に小さくすることができる。よって、零クロス点近傍におけるトルクリップルが抑制される。
(もっと読む)
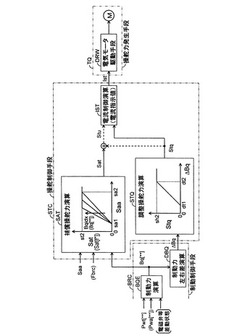
電動パワーステアリング装置
【課題】静粛性の低下を抑えつつ、協調制御実行時の高い応答性を実現することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部25は、操舵トルクτに応じた目標アシスト力に対応する基本アシスト制御量Ias*を演算する基本アシスト制御部27と、ヨーレイト偏差Δγに基づいて車両挙動安定化制御と協調したアシスト力付与を行うための協調制御量Icc*を演算する協調制御部28とを備える。また、モータ制御信号出力部26は、そのF/B制御部32の実行する電流フィードバック制御に用いるフィードバックゲイン(Kp,Ki)を演算するF/Bゲイン演算部34を備える。そして、F/Bゲイン演算部34は、上記協調制御量Icc*の基礎となるヨーレイト偏差Δγに基づいて、そのフィードバックゲインの演算(変更)を実行する。
(もっと読む)
41 - 60 / 378
[ Back to top ]