
Fターム[3D232DE02]の内容
走行状態に応じる操向制御 (73,124) | 制御出力パターン (1,729) | 漸増減 (378)
Fターム[3D232DE02]に分類される特許
21 - 40 / 378
車両の挙動制御装置
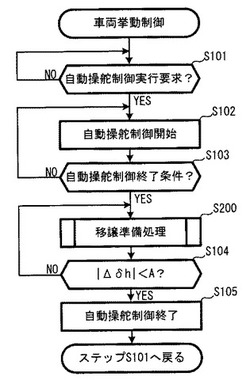
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
電動パワーステアリング装置

【課題】車速によらず、制御安定性を確保するとともに、操舵フィーリングが低下することのない電動パワーステアリング装置を提供する。
【解決手段】電動モータにアシストトルクを発生させるアシスト電流Iaの値を、操舵トルクセンサ30により検出された操舵トルクVT3の値で割った除算値(アシスト電流/操舵トルク=Ia/VT3)が大きい程、操舵トルクセンサ30から出力される操舵トルクVT3に対して大きな遅れ位相補償(小さな進み位相補償)を施すようにしたので、制御安定性が確保されるとともに、操舵フィーリングが低下する除算値の小さい領域では、大きな進み位相補償を施すようにしたので、良好な操舵フィーリングが得られる。よって、低速での操舵フィーリングも低下することがない。
(もっと読む)
電気式パワーステアリング装置
【課題】車両のキーOFF操作直後に発生し得るキックバックを防止するEPS装置の提供。
【解決手段】メイン回路22と、EPSモータ駆動回路21と、EPSコントローラ20とを含み、EPSコントローラは、バッテリの一端と、キースイッチを介して接続されている他、キースイッチが介挿されないEPSコントローラ給電線23によって接続されており、メイン回路は、油圧モータ及び走行モータの各駆動回路と、これらに並列に接続された平滑コンデンサと、バッテリの一端又は他端と平滑コンデンサとの間に介挿され、キーON/OFFに連動してON/OFFするコンタクタMCとからなり、キーOFFが検出された際、EPSコントローラ給電線を通じてEPSコントローラへの給電が継続されると共に平滑コンデンサの残留電荷を電源としてEPSモータが駆動されることで、キーOFF後もEPS制御を所定期間継続させ得るものとする。
(もっと読む)
ステアリング制御装置
【課題】車両の発進直後のステアリング操作性を向上させる。
【解決手段】ステアリング制御装置1は、車両2の直進に対応する中立位置を含む範囲で回転操作されるステアリングホイール5に対してトルクを付与するモータ10と、ステアリングホイール5の回転操作に応じて変動する車両2の操舵角を検出する操舵角センサ11と、車両2が発進直後であるか否かを判定する発進判定部22と、車両2が発進直後であると発進判定部22が判定したとき、操舵角センサ11が検出した操舵角に基づいて、中立位置へ向かって作用する中立方向トルクのトルク量を決定し、決定したトルク量の中立方向トルクをモータ10に発生させるトルク制御部22と、を備える。
(もっと読む)
車両用操舵装置
【課題】タイヤの横力に応じた反力をドライバに返すことにより、優れた操舵フィーリングを持つ車両用操舵装置を提供する。
【解決手段】操舵トルクを検出するためのトルクセンサ13と、車速を検出するための車速センサ14と、操舵補助力を発生するための操舵補助電動モータ20と、トルクセンサ13の検出操舵トルク及び車速センサ14の検出車速とに基づいて操舵補助電動モータ20を駆動制御するEPS制御部21とを備える。EPS制御部21は、操舵トルクと車速とに基づいてタイヤの横滑り角βを推定し、推定されたタイヤの横滑り角βと検出車速とを用いてタイヤの横力Fyを推定する。さらに、トルクセンサ13の検出操舵トルクに基づいて、ステアリング機構に対応する所定の伝達関数を用いて、タイヤの横力Fy′を推定する。これらのタイヤの横力Fy,Fy′を合わせて、互いに補間させる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】電流指令値制限部74は、電流指令上限値演算部73が演算する電流指令上限値Ilim以下にγ軸電流指令値を制限する。また、電流指令上限値演算部73に設けられた切替制御部75は、演算周期毎のモータ回転角変化量に相当する加算角の基礎成分、即ちトルク偏差Δτに基づく第1変化成分dθτ、及びモータの回転により生ずる誘起電圧(誘起電圧二乗和Esq_αβ)に基づいて、モータの制御状態が安定的であるか否かを判定する。そして、切替制御部75は、その制御状態が不安定であると判定した場合には、上記電流指令上限値Ilimを、当該制御状態が安定的である場合の値(Ilim_a)よりも高い値(Ilim_b)に変更すべき旨を決定する。
(もっと読む)
電動パワーステアリング装置
【課題】端当て回数を計数して管理すると共に、端当て回数に応じた電流制限値を算出してアシストを制限することにより、構成部品の軽量、小型化を図った電動パワーステアリング装置を提供する。
【解決手段】操舵トルク及び操舵トルクを微分した微分操舵トルクに基づいて端当てを検出し、端当て検出信号を出力する端当て検出手段と、端当て検出手段で検出された端当て回数1を計数する計数手段と、通算端当て回数を記憶して保持している記憶手段と、計数手段からの端当て回数1と記憶手段からの通算端当て回数とを加算した端当て回数2に対応した電流制限値を算出する電流制限値算出手段とを具備し、電流制限値算出手段で算出された電流制限値に基づいて電流指令値を制限する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】電流指令値制限部は、電流指令上限値演算部が演算する電流指令上限値Ilim以下にγ軸電流指令値を制限する。また、電流指令上限値演算部に設けられた切替制御部は、その制御上の仮想的なモータ回転角としての制御角と実回転角との乖離を示す負荷角(誤差角)θLの(正弦成分である「sinθL」)を推定し、その負荷角θLに基づいて、モータの制御状態を判定する。そして、切替制御部は、その制御状態が不安定化状態にあると判定した場合には、上記電流指令上限値Ilimを、当該制御状態が安定的である場合の値(Ilim_a)よりも高い値(Ilim_b)に変更すべき旨を決定する。
(もっと読む)
舵力評価装置、及び、舵力評価方法
【課題】操舵時に機械的に検出される実舵力とドライバが感じる感受舵力との関係を定量的に評価することができる舵力評価装置を提供する。
【解決手段】操舵制御部20は、ステアリングホイール4に対する実舵力Tsを提示しながら基準舵力T0までの操舵をドライバに促すことで基準舵力T0をドライバに知覚させた後、実舵力Tsを提示しない状態で基準舵力の所定倍nに設定された複数の指示舵力n・T0までの操舵をドライバに順次促すことで各指示舵力n・T0に対ししてドライバが入力した実舵力Tsとの関係をサンプリングし、実舵力Tsに対応する指示舵力n・T0をステアリングホイール4に対してドライバが入力したと感じる感受舵力Th_bとして定義して、実舵力Tsと感受舵力Th_bとの関係を示す感受特性を関数近似する。
(もっと読む)
車両のパワーステアリング装置
【課題】ドライバのフィーリングに合致した操舵アシスト力を発生させることができるパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、操舵時にドライバが入力する実舵力Tsと当該実舵力Tsに対してドライバが入力したと感じる感受舵力Th_bとの関係について設定した感受特性を用い、基本アシスト力Tassist_bを付与した操舵系に対してドライバが操舵を行う際のハンドル角θと実舵力Tsとの関係を示す実舵力特性Ts(θ)を、ハンドル角θと感受舵力Th_bとの関係を示す感受舵力特性Th_b(θ)に変換し、この感受舵力特性Th_bを線形的に変化させるために必要な補間量ΔThを示す感受舵力補間特性を設定するとともに、感受特性を用いて感受舵力補間特性を変換して舵力補間特性を設定する。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵系にアシスト力を付与するモータについて、実際のモータの抵抗と算出されるモータの抵抗とが乖離することを抑制することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、抵抗マップによりモータ抵抗Rmを算出する。モータ電流とモータ電圧とに基づいて推定誘起電圧を算出する。そして、推定誘起電圧が、電流の大きさに応じて設定される判定値以下の旨判定されるとき、モータ抵抗(推定モータ抵抗Rma)を算出し、この推定モータ抵抗Rmaに基づいて抵抗マップを更新する。
(もっと読む)
電気自動車
【課題】 電気制御式の操舵機構の異常や、左右の駆動輪のモータ駆動系の異常に対し、操舵機構と左右個別のモータとによる旋回走行の相互補完機能を利用し、上記異常の発生時に、ドライバーの意図した方向に進めるように制御できる電気自動車を提供する。
【解決手段】 左右の駆動輪2,2を駆動する独立したモータ6,6と、転舵機構11に機械的に連結されていないステアリングホイール14により操舵する操舵機構12を備える電気自動車に適用する。異常時補完手段37として、操舵系の異常の検出によって、その異常による転舵不足を補うように、左右駆動輪2,2のトルク指令の配分を変更する異常対応トルク配分変更部39を設ける。また、車輪駆動系の異常検出によって、その異常による左右両駆動輪2,2の駆動バランスの変化量を補うように、操舵機構12の転舵用モータ13の回転量を変更する異常対応転舵量変更部38を設ける。
(もっと読む)
電動パワーステアリング装置
【課題】積載状態により車両重量が変化しても操舵フィーリングを低下させない電動パワーステアリング装置を提供する。
【解決手段】車両重量Wとバッテリ100のバッテリ電圧PIGは、電流制限値決定部24に入力される。電流制限値決定部24は、車両重量−最大出力制限値マップに基づいて、入力された車両重量Wに対応したモータ駆動電流の最大出力制限値を取得し、バッテリ電圧−出力電流制限値マップ上の出力電流制限値を変更する。そして、電流制限値決定部24は、上記バッテリ電圧−出力電流制限値マップに基づいて、検出されたバッテリ電圧PIGに対応する出力電流制限値Iul,Ivl,Iwlを決定し、モータ駆動電流制限手段23に出力する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】低減時間調整部は、「負の値」を有するγ軸電流増減値を積算制御部に出力してγ軸電流指令値Iγ**(Iγ*)の低減を許可した時点から、所定時間t_thの経過をもって、新たなγ軸電流増減値の積算によるγ軸電流指令値Iγ**の低減を許可する。そして、低減時間調整部は、γ軸電流指令値Iγ**に基づいて、当該γ軸電流指令値Iγ**の低減調整処理に用いる上記の所定時間t_thを変更する。
(もっと読む)
異常判定装置および車両用制御装置
【課題】舵角センサの診断における誤判定を抑えることを目的とする。
【解決手段】第1診断手段21は、舵角センサ92から取得した舵角の今回値と前回値との差の絶対値を変化量として算出する第1変化量算出部21Aと、正常閾値を記憶する第1記憶部21Bと、変化量が正常閾値を超えたときに、舵角の前回値を基準舵角に設定する基準舵角設定部21Cと、変化量が正常閾値を超えたときから第1の判定時間が経過するまでの間、正常閾値を徐々に増加させる増加部21Eと、第1の判定時間中、舵角と基準舵角との偏差と、正常閾値とを比較し、偏差が正常閾値よりも大きいときに第1カウンタ21Gをカウントアップ(カウント)する偏差比較部21Fと、第1カウンタ21Gが所定値に達すると舵角センサ92が異常であると判定する第1判定部21Hを備えている。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの推定温度が実際の温度より高くなり、過熱状態でないにも関わらず、電動モータの電流制限制御が行われることを防止できる電動パワーステアリング装置を提供することにある。
【解決手段】基板温度センサの今回値と前回値の差を絶えず検出し、基板温度センサの今回値が前回値に比較して大きく変化したときには、大きく変化する前の前回値を基板温度センサの基準値として記憶する。そして、基板温度センサ異常検出手段が検出した基板温度センサ異常が所定時間以上継続するまで、基板温度センサの基準値として記憶した基板温度センサの前回値を、基板温度の推定演算に使用する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサが故障して操舵トルクを検出することができなくなった場合において、SAT(セルフアライニングトルク)が弱い極低速域での操作子の切り戻し時の操舵力を低減する電動パワーステアリング装置を提供する。
【解決手段】残留切り戻し角θsc3が残った状態で切り込み方向のアシスト電流Iaがゼロ値近傍となったときに回転角検出部により検出されている回転子回転角θscを基準角度θfとして切り戻し回転角θscを検出し、切り戻し回転角θscと特性102とに基づき、切り込み方向とは逆方向の切り戻し方向にモータを駆動するようにしたので、操作子の操作角が中立位置に近づく方向にアシストが可能となり、戻し側の操舵力を低減して、操作子を中立位置付近に戻し易くすることができる。
(もっと読む)
走行計画生成方法および走行計画生成装置
【課題】 車両の搭乗者の乗り心地を十分に向上させることができる走行計画生成方法および走行計画生成装置を提供する。
【解決手段】 走行制御ECU1における走行計画生成部10は、車両の車速に基づいて走行軌跡における最大横加速度および最大横ジャークを設定する。また、設定した最大横加速度および最大横ジャークに基づいて、(最大横加速度×π/2)/最大横ジャークから転舵時間を算出する。これらの最大横加速度、最大横ジャーク、および転舵時間に基づいて走行軌跡を生成する。
(もっと読む)
操舵装置
【課題】運転者の知覚特性に適合した操舵制御を行う。
【解決手段】操舵装置は、運転者が操舵ハンドルを操作する操作量に基づいて、車両が走行する道路の環境を特定する特定手段と、特定された環境に基づいて、操舵ハンドルに発生させる操舵減衰力を制御する制御手段とを備える。ダンピング制御部130は、基本ダンピング制御部131によって設定した基本ダンピングトルクTbと、調整ゲイン設定部1341によって道幅判定値に応じて設定した調整ゲインGaとの積をダンピングトルクとして設定する。
(もっと読む)
21 - 40 / 378
[ Back to top ]