
Fターム[3D233CA17]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 操舵の状況 (7,023) | ステアリング系の操舵角、操舵方向 (2,121)
Fターム[3D233CA17]に分類される特許
141 - 160 / 2,121
ステアバイワイヤの操舵反力制御装置
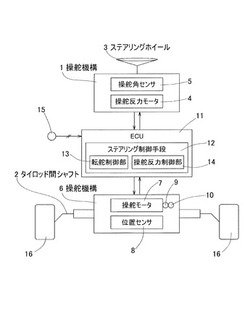
【課題】ステアリングホイールを中立位置から切り始めた際の良好な手応えを確保し、中立周りでの振動を防ぎつつ、手放し時における戻り位置を出来るだけ中立位置にするステアバイワイヤの操舵反力制御装置を提供する。
【解決手段】タイロッド間シャフト2と機械的に連結されていないステアリングホイール3に対し、操舵角センサ5と操舵反力モータ4とが設けられる。ステアリング制御手段12は、操舵角を基に、タイロッド間シャフト2を駆動する転舵機構6の転舵モータ7を制御する。ステアリング制御手段12に、操舵方向と転舵反力の方向とが異なる場合には正入力、同方向の場合には逆入力と判定し、この正逆に応じて操舵反力モータ4の操舵反力を制御する操舵反力制御部14を設ける。
(もっと読む)
電動ステアリング装置

【課題】運転者にとって期待される安定した修正操舵の実施を可能とする電動ステアリング装置を提供する。
【解決手段】操舵トルクTに基づいて制御装置200Aにより制御されて操舵補助力を発生する電動機11を備えた電動パワーステアリング装置において、操向ハンドルに設けられて、運転者の操作により電気信号を出力する操作スイッチ2aL,2aRと、操作スイッチ2aL,2aRからの電気信号に応じて電動機11を駆動する電流を付加する付加電流値波形を演算して出力する付加電流演算部300Aと、を備えている。付加電流演算部300Aは、操作スイッチ2aL,2aRの運転者によるオン状態の時間の長短に関わらず、1回の操作に応じて、車両の走行状態情報に応じた所定の付加電流値IAdの電流波形を生成して出力する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】ドライバが、広い運転領域で操舵輪のグリップ状況を舵力インフォメーションとして舵力で感じとりながら安心して適切な運転を行う。
【解決手段】操舵制御部は、ハンドル角と車速に応じて車両の運動モデルに基づき目標横加速度Gytを算出し、実際の横加速度と目標横加速度Gytとの偏差(横加速度偏差)ΔGyを算出し、操舵速度の絶対値と車速とに応じて現在の操舵状態がドライバが舵力をフィードバックして操舵している状態か否か判定し、ドライバが舵力をフィードバックして操舵している状態と判定し、且つ、横加速度偏差ΔGyが予め設定しておいた設定値CG以上の場合は、車速と操舵トルクを基に設定する基本アシストトルクTbを増加する方向に補正して、この補正した基本アシストトルクTbをアシストトルクTaとしてモータ駆動部に出力する。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
ステアリング装置
【課題】 追加のモータを一つ備えることで、大舵角調整機能とフェールセーフ機能を同時に付加できて、追加のモータの効率的な使用が行えるステアリング装置を提供する。
【解決手段】 車台1に回転自在に支持されるサスペンションホルダ2に、このサスペンションホルダ2に対して車輪6の転舵を行わせるホルダ上転舵用支持機構5を設ける。サスペンションホルダ2と共に車輪6を転舵する第1の転舵機構7を設ける。サスペンションホルダ2に対して車輪6を転舵する第2の転舵機構8を設ける。これら各転舵機構7,8に転舵用のモータ9,10を設ける。各車輪6にインホイールモータ20を設ける。
(もっと読む)
回転角度検出装置および電動パワーステアリング装置
【課題】ギヤのバックラッシュを低減できるとともに、回転角度の検出精度が低下しない回転角度検出装置および電動パワーステアリング装置を提供する。
【解決手段】バネ12は付勢手段として、その一端がケース9に弾接して、ケース9がセンサハウジング10の方向に付勢される。このケース9を介したバネ12の付勢力によって、ケース9に装着された第一の検出ギヤ3及び第二の検出ギヤ4をメインギヤ2の方向へ押圧している。さらに、ケース9を取付けるセンサハウジング10には、バネ12を挟み込んだ形で突出した押さえ板13が設けられ、この押さえ板13にバネ12の他端が弾接してバネ12を保持する。バネ12は両端をケース9及び押さえ板13に設けられた座グリ穴14,15により保持され、バネ12の付勢力が一定の力になるように保持されている。
(もっと読む)
車両の操舵力制御装置
【課題】制動制御によって操向車輪に制動力の左右差が発生している際における操向車輪のセルフアライニングトルクの変化を打ち消し得る車両の操舵力制御装置の提供。
【解決手段】この装置では、車両の運転者による制動操作に依存することなく車両の状態に基づく制動制御によって操向車輪に付与される制動力(Bq[f*])が調整される。車両の操舵操作部材に操舵力を付与する操舵力発生手段(TQ)が備えられる。制動制御によって操向車輪に付与される制動力(Bq[f*])の左右差(ΔBq)に基づいて、操舵力発生手段(TQ)により操舵操作部材に付与される操舵力が調整される。この操舵力は、操向車輪に付与される制動力(Bq[f*])の左右差(ΔBq)が大きいほど、より大きい値に調整される。
(もっと読む)
移動農機
【課題】圃場での作業に合わせて容易にステアリング可能な移動農機を提供する。
【解決手段】ステアリングハンドルの操舵範囲を複数の領域に分割して形成し、主に機体を旋回させる際に使用される旋回領域Bでは、ステアリングハンドルの操舵量に対する前輪の操向量の比率を、この旋回領域よりも操舵角の小さな領域である方向修正領域よりも大きく設定する。これにより、作業者は直進時には、ステアリングハンドルを方向修正用域で操舵して機体の方向を微調整すると共に、旋回時には、ステアリングハンドルを旋回領域まで操舵して、少しの操舵で機体を旋回させる。
(もっと読む)
産業車両のステアリング装置
【課題】演算処理の負担を軽減し、ハンドル操作に対するタイヤ操舵の追従性を向上させ、路面状況にも合わせて操舵処理を行う。
【解決手段】ハンドル1の回転速度がハンドル不感帯外にある場合は、ハンドル制御に移行して、ハンドル1の回転速度に応じたDUTYをステアリングモータ3に出力し、タイヤ7を旋回駆動する。一方、ハンドル1の回転速度がハンドル不感帯内にある場合は、タイヤ角保持制御に移行して、ハンドル1の回転速度が不感帯内に入った時のタイヤ角をタイヤ角指令値θrefとして保存し、タイヤ角検出値θdetがタイヤ角不感帯内にある場合は、前記ステアリングモータ3を停止して、その時点でのタイヤ角を維持し、タイヤ角検出値θdetがタイヤ角不感帯外にある場合は、タイヤ角がタイヤ角不感帯内に収まるように、ステアリングモータ3を制御する。
(もっと読む)
磁歪式トルクセンサ及び電動パワーステアリング装置
【課題】低コストに製造でき、曲げモーメント分をキャンセルできる磁歪式トルクセンサを提供する。
【解決手段】回転軸21の表面に設けられ回転軸21に作用する回転トルクの大きさに応じて歪量が変わり透磁率を変化させる磁歪材30と、回転軸21の周辺に配置され磁歪材30の透磁率の変化を電気的変化として検出する2つの検出手段37、38とを備えた磁歪式トルクセンサ3において、歪量の変化量が磁歪材30内で均一になるように変化した場合に互いに異なった量の電気的変化を検出する。検出手段37、38はそれぞれに、磁歪材30の置かれた領域に磁場を発生させる励磁コイル31、33と、透磁率に応じた磁場の強さを電気的に検出する検出コイル32、34とを有し、検出手段37、38では互いに、励磁コイル31、33又は検出コイル32、34の巻線の巻数N1、N2が異なっている(N1≠N2)。
(もっと読む)
車両の操舵力制御装置
【課題】制動制御によって操向車輪に制動力が付与される際における操向車輪のセルフアライニングトルクの不足を補償し得る車両の操舵力制御装置を提供する。
【解決手段】この装置では、車両の運転者による制動操作に依存することなく車両の状態に基づく制動制御によって操向車輪に付与される制動力Bq[f*]が調整される。車両の操舵操作部材に操舵力を付与する操舵力発生手段TQが備えられる。操舵角Saaと、制動制御によって操向車輪に付与される制動力Bq[f*]とに基づいて、操舵力発生手段TQにより操舵操作部材に付与される操舵力が調整される。この操舵力は、操向車輪に付与される制動力Bq[f*]が大きいほど、また、操舵角Saaが大きいほど、より大きい値に調整される。
(もっと読む)
操舵装置
【課題】例えばスラント路を車両が直進走行する際、運転者の知覚特性に適合した操舵制御を行う。
【解決手段】操舵装置は、運転者が操舵ハンドルを操作する操作量に基づいて、車両が走行する道路の道路幅を特定する第1特定手段と、道路の道路幅方向の傾きを特定する第2特定手段と、特定された道路幅と特定された傾きとに基づいて、運転者による車両の操舵をアシストするためのアシストトルクを制御する制御手段とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】センサ異常が発生した場合に、残りの入力軸回転角センサ及び出力軸回転角センサを使用してトルク検出値を算出できる電動パワーステアリング装置を提供する。
【解決手段】入力軸2aの回転角を検出して操舵角を検出する操舵角検出手段13と、電動モータ12のモータ回転角を検出するレゾルバ17とを備え、トルク検出手段14は、複数組の入力軸回転角センサ15a,15b及び出力軸回転角センサ16a,16bを有し、前記各回転角センサの異常を検出するセンサ異常検出手段44と、該センサ異常検出手段で、前記入力軸回転角センサ及び前記出力軸回転角センサの少なくとも1以上の異常を検出したときに、代替え回転角センサの有無を判断し、前記代替え回転角センサが有るときには当該代替えセンサの検出信号で代替えし、前記代替え回転角センサが無いときには前記操舵角検出手段及び前記レゾルバの一方で代替えする代替え制御手段43とを備えた。
(もっと読む)
電動パワーステアリング装置
【課題】衝突回避時等における操舵性の向上を実現した電動パワーステアリング装置を提供する。
【解決手段】EPS−ECUは、ステップS24で実操舵角速度ωから第1通常時目標操舵角速度KTω1を減じることで第1通常時操舵角速度差DTω1を設定し、ステップS25で実操舵角速度ωから第1緊急時目標操舵角速度KMω1を減じることで第1緊急時操舵角速度差DMω1を設定する。次に、EPS−ECUは、ステップS26で衝突回避操舵フラグFesが1であるか否かを判定し、この判定がNoであれば(すなわち、通常操舵状態であれば)、ステップS27でDTω1を切増側操舵角速度差Dω1として採用する。一方、ステップS26の判定がYesであれば(すなわち、衝突回避操舵状態であれば)、ステップS27でDTω2を切増側操舵角速度差Dω1として採用する。
(もっと読む)
移動体の操舵反力調整装置
【課題】運転者の疲労状態により適した操舵反力に近づくように当該操舵反力を調整可能とすることを目的とする。
【解決手段】操舵反力用コントローラ6は、筋力検出部11と、疲労推定部12と、反力調整部13とを備える。筋力検出部11は、筋骨格モデルとアドミタンス計測手法をもちいて、運転者の肩部から手までに位置する腕の筋肉のうちから選択した複数の筋の筋力を推定する。そして、推定した複数の筋の疲労度と操作子の操舵状態とに基づき、操作子に付加する操舵反力を調整する。
(もっと読む)
電動パワーステアリング装置
【課題】走行安定性や操舵性の向上等を実現した電動パワーステアリング装置を提供する。
【解決手段】EPS−ECUは、ステップS4でステアリングホイール2が切り増し状態(すなわち、行き側)であるか否かを判定し、この判定がYesであればステップS5で切増時目標操舵トルクTtgを目標操舵トルクベース値Ttbとする。また、ステップS4の判定がNoであった場合、EPS−ECUは、ステップS6でステアリングホイール2が切り戻し状態(すなわち、戻り側)であるか否かを判定し、この判定がYesであればステップS7で切戻時目標操舵トルクTtrを目標操舵トルクベース値Ttbとする。そして、ステップS6の判定もNoであった場合(すなわち、ステアリングホイール2が回転してない保舵状態にあった場合)、EPS−ECUは、ステップS8で保舵時目標操舵トルクTthを目標操舵トルクベース値Ttbとする。
(もっと読む)
電動パワーステアリング装置
【課題】 衝突回避時等における操舵性や安定性の向上等を実現した電動パワーステアリング装置を提供する。
【解決手段】 ステップS6で衝突回避支援装置25から緊急時フラグFemgが入力しているか否か(Femg=1であるか否か)を判定し、この判定がNoであればステップS7で通常時操舵角速度差DTωに所定の変換係数Kを乗じることによって操舵反力トルクベース値Trbを算出/設定し、YesであればステップS8で緊急時操舵角速度差DMωに所定の変換係数Kを乗じることによって操舵反力トルクベース値Trbを算出/設定する。
(もっと読む)
車両用制御装置
【課題】車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる車両用制御装置を提供すること。
【解決手段】キャンバ角調整手段によりキャンバ角調整装置44が作動され後輪のキャンバ角が調整されて後輪にネガティブキャンバが付与される。ネガティブキャンバの付与により後輪に発生するキャンバスラストを利用して、車両の走行安定性を確保できる。また、キャンバ角調整手段により後輪にネガティブキャンバが付与される場合に、コーナリングフォース変更手段により前輪の等価コーナリングフォースが変更される。前輪の等価コーナリングフォースが変更されることにより、車両の操縦性の指標である操安キャパシティを変更することができ、車両の操縦性を制御できる。これにより、車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる。
(もっと読む)
車両挙動制御装置
【課題】複数の車両挙動制御装置のうち一の装置が故障した場合に、車両挙動の乱れを抑制しつつ他の装置へ切り替える。
【解決手段】車両挙動制御装置は、車両(10)の複数の車両挙動制御手段(400、500、600、800)から2以上を選択して車両の挙動を制御する挙動制御実行手段(100)と、選択された車両挙動制御手段のうち少なくとも一つの車両挙動制御手段が故障したか否かを判定する判定手段(100)と、故障したと判定された場合、故障したと判定された車両挙動制御手段と切り替え可能な予備挙動制御手段を選択する選択手段(100)と、予備挙動制御手段を用いた場合に、選択された車両挙動制御手段に係る制御量の変化量を演算する演算手段(100)と、演算された変化量に基づいて、故障したと判定された車両挙動制御手段と切り替えるべき予備挙動制御手段を決定する決定手段(100)と、を備える。
(もっと読む)
回転角度検出装置および電動パワーステアリング装置
【課題】温度変化があった場合でも、ギヤのバックラッシュの変化量を低減できる回転角度の検出精度のよい回転角度検出装置および電動パワーステアリング装置を提供する。
【解決手段】ケース8は、センサハウジング9との取付け部分、及び検出ギヤ4の回転を支持する部分に線膨張係数の小さい金属により形成されたインサート部材11がインサート成形されている。また、回転体10及びメインギヤ2内に装着されメインギヤ2を保持する保持リング3が同じく線膨張係数が小さい金属材料で形成されている。この保持リング3を介してメインギヤ2は回転体10に圧入され、回転体10にメインギヤ2がガタのない状態で組付けられる。
(もっと読む)
141 - 160 / 2,121
[ Back to top ]