
Fターム[3D244AA12]の内容
Fターム[3D244AA12]に分類される特許
1 - 20 / 24
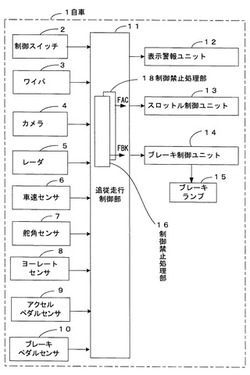
追従走行制御装置
【課題】交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の減速や加速が行なえるようにする。
【解決手段】追従走行制御部11の制御禁止処理部16により、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止し、走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開することにより、例えばブレーキが作動する減速制御の場合に、直ちに減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて運転者に違和感を与えることなく減速を開始し、その間の走行状況の変化によってブレーキ操作の回数を減少し、また、禁止時間にはブレーキランプを点灯しないため、自車のブレーキランプの点灯に応動して後続車が次々とブレーキをかける事態の発生を防止する。
(もっと読む)
車間距離制御装置

【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速を検出する車速検出手段2aと、先行車両を検出するとともに自車両と先行車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して算出された車間時間を設定車間時間に制御する車間距離制御を行う車両制御手段2cと、車線変更の開始及び終了を検出する車線変更検出手段2dと、運転者の顔向きを検出する顔向き検出手段2eとを備えるとともに、車線変更検出手段2dにより車線変更の終了が検出されて、車間距離検出手段2bにより先行車両が検出されずに、顔向き検出手段2eにより検出された顔向きが前方以外である場合に、車両制御手段2cが車間距離制御による加速を禁止することを特徴とする。
(もっと読む)
車両用減速制御装置及び車両用減速制御方法
【課題】カーブに対する車両の減速制御を適切に行う。
【解決手段】車両用減速制御装置は、測位部14aが測位した車両位置と記憶媒体14cに記憶された地図情報とを基に、地図情報の地図上の車両位置を特定するマップマッチングを行うマップマッチング部14bと、マップマッチング部14bが特定した地図上の車両位置と地図情報とから、車両前方のカーブ曲率を検出し、検出したカーブ曲率の大きさを基に算出した目標減速度を基に、車両を減速制御する制駆動力コントロールユニット8と、を備える。制駆動力コントロールユニット8は、マップマッチング部14bによるマップマッチングの確度を算出し、算出したマップマッチングの確度が低いほど、目標減速度が小さくなるように補正する。
(もっと読む)
車両走行制御装置
【課題】 車両が旋回中に所定の速度で走行する走行制御が開始された場合でも、ドライバ対して与える違和感を小さくすることができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、ヨーレートセンサ5から送信されるヨーレート信号および車速センサ7から送信される車速信号に基づいて自車両の旋回状態を検出する。ここで、自車両が旋回状態にあるときにクルーズ設定スイッチ4がONとされた場合には、ACCを開始するとともに、スロットル開度を0に設定して、現状のスロットル開度を維持するようにする。
(もっと読む)
車両走行制御装置
【課題】主走行状態検出手段に異常が発生することで、異常な目標制御量に基づいて車速調整装置が作動されることを抑制することができる車両走行制御装置を提供する。
【解決手段】車両走行制御装置1に、車輪速度センサ3の他に、車両の走行状態を検出する駆動系回転センサ7を設ける。また、エンジンECU9は、自動走行制御ECU8により自動走行制御を行っている際に、駆動系回転センサ7での検出結果に基づいて算出した車速Veが異常判定条件を満たした場合には、自動走行制御は行わずに、エンジン100の通常制御を行う。このように、エンジンECU9に、駆動系回転センサ7での検出結果に基づいた異常判定条件を設定することにより、車輪速度センサ3に発生した異常を検出することができる。この結果、車輪速度センサ3に異常が発生することで、異常な目標制御量に基づいてエンジン100が作動されることを抑制することができる。
(もっと読む)
車両走行制御装置
【課題】自動走行制御を不可能にしてしまうような異常の検知
【解決手段】車両の車速の調整を行うエンジン100を目標制御量に基づいて制御する第1ECU(エンジンECU9)と、車速が目標車速となるように目標制御量を算出して第1ECUへと出力する第2ECU(自動走行制御ECU8)と、を備え、その第1ECUは、エンジン100の回転数又は発生する制御量が所定値を超えた際に目標制御量に基づくエンジン100の制御を禁止させるべき異常状態にあるとの判定を行う異常判定部(システム限界判定部91)を設けること。
(もっと読む)
追従制御装置
【課題】 周辺環境に適した車間距離を確保して走行することを可能にする追従制御装置を提供する。
【解決手段】 追従制御装置1は、車両に搭載されたECU2を備えている。ECU2は、メモリ部13に記憶されたドライバ好み車間距離マップから、ドライバの好みに応じた車間距離を設定する車間距離設定部15と、前方レーダ9及び後方レーダ10の検出信号に基づいて、自車両と周辺車両との車間距離等を求める周辺車両検出部16と、自車両と周辺車両との車間距離等に基づいて、周辺車両の走行状態に応じた車間距離を求める車間距離設定部17と、ドライバの好みに応じた車間距離と周辺車両の走行状態に応じた車間距離とを用いて、自車両と先行車両との目標車間距離を求める目標車間距離設定部18と、目標車間距離に応じて速度を制御する速度制御部20とを有している。
(もっと読む)
目標物監視装置、及び目標物監視方法
【課題】複雑なアルゴリズム処理を要することなく、監視対象となる目標物の検出方向を
精度良く決定することができ、安価な構成部品により、目標物の誤検出を防止することが
できる目標物監視装置を提供すること。
【解決手段】監視対象となる目標物を検出する目標物検出部23aと、走行している道路
のカーブR情報を取得するカーブ情報取得部23bと、所定期間内におけるカーブR情報
の変動状態を判定するカーブ変動状態判定部23cとを備え、カーブ変動状態判定部23
cによりカーブR情報の変動状態が所定の変動条件を満たしたと判定された場合、目標物
検出部23aが、所定の閾値条件を満たすカーブR情報を利用して目標物を検出する。
(もっと読む)
車両制御装置及びプログラム
【課題】稼働範囲が広い等の有効性を備えた車両制御装置及びプログラムを提供すること。
【解決手段】 光学測定装置(レーザー装置)3によって得られた測定対象のデータに基づいて、車両の制御を行う車両制御装置1において、光学測定装置3の測定能力の低下を検出するとともに、自車速を車速検出手段(車速センサ)11によって検出する。そして、光学測定装置3の測定能力の低下を検出した場合には、車速検出手段11によって検出した自車速に応じて、光学測定装置3による測定を制限する。
(もっと読む)
オートクルーズ装置およびプログラム
【課題】ユーザの意図しない操作が受け付けられてしまうことを防止しつつ、オートクルーズ装置としての操作性を低下させないようにすること。
【解決手段】スイッチの操作が検出されてからその操作が検出されなくなるまでの間に別のスイッチの操作が検出された(2つのスイッチが同時に操作された)場合(s240「YES」)、それら操作の組み合わせがあらかじめ定められた組み合わせであるときに、定速走行の開始を禁止している(s260→s280)。そして、本実施形態では、定速走行の開始を禁止すべき組み合わせとして、同時に操作されうるスイッチの組み合わせを除いた組み合わせがあらかじめ定められているため、ユーザの意図しない操作が受け付けられてしまうことを防止しつつ、オートクルーズ装置1としての操作性を低下させないようにすることができる。
(もっと読む)
自動変速機の出力軸回転速度推定装置及び異常診断装置並びにオートクルーズ制御装置
【課題】変速中であっても自動変速機の出力軸回転速度を正確に推定することができ、そしてその推定値を利用してセンサ出力に異常がないか否かを診断できる自動変速機の出力軸回転速度推定装置及び異常診断装置並びにそれらの装置を使用するオートクルーズ制御装置を提供する。
【解決手段】入力軸から入力したエンジン回転を変速して出力軸から出力する自動変速機の出力軸回転速度を推定する出力軸回転速度推定装置であって、入力軸の回転速度を検出する入力軸回転速度検出手段(ステップS1)と、現在の車速及びスロットル開度に基づいて目標変速比を設定する目標変速比設定手段(ステップS1)と、入力軸の回転速度及び目標変速比に基づいて出力軸の回転速度を推定する出力軸回転速度推定手段(ステップS5)とを有する。
(もっと読む)
滑走艇の運転制御装置
【課題】エンジンが過回転状態にあるときにクルーズ制御操作手段が操作されても、エンジンが過回転状態に保持されることのない滑走艇の運転制御装置を提供する。
【解決手段】エンジン5が特定運転状態であるか否かを判定する特定運転状態判定手段30を設け、モード設定手段30は、エンジン5が特定運転状態であると判定された時は速度設定モードへのモード設定を禁止し、上記特定運転状態でないと判定された時は上記速度設定モードへのモード設定を許可する。
(もっと読む)
車両の自動走行制御装置
【課題】自動走行制御システムにおいて、走行路面の凹凸による走行安定性や乗り心地の悪化が問題とならない範囲内で自動走行制御を実行できるようにする。
【解決手段】車両の少なくとも1つの車輪の上下方向の振動を検出する加速度センサ43の出力信号等に基づいて路面凹凸度合を推定し、この路面凹凸度合が所定値α以上であれば、自動走行制御を禁止する。また、実車速が遅くなれば、走行安定性にさほど配慮する必要がなくなるという事情を考慮して、実車速が所定車速β以下のときには、路面凹凸度合が所定値α以上であっても、自動走行制御を禁止しないようにする。また、自動走行制御の実行中は、路面凹凸度合が大きくなるほど、自動走行制御の制御ゲインを小さくするようにする。これにより、路面凹凸度合が大きくなるほど、目標車速に対する追従性を遅くして、走行安定性や乗り心地に悪影響を及ぼす急激な加減速を避ける。
(もっと読む)
自動隊列走行制御装置および自動隊列走行制御システム
【課題】複数の異常状態が重なって連続的に発生した場合であっても、迅速かつ確実に隊列全体を制御する自動隊列走行制御装置および自動隊列走行制御システムを提供すること。
【解決手段】自車の車両状態と通信を介して取得した他車の車両状態とに基づいて隊列走行における自車の走行を自動的に制御する自動隊列走行制御装置1は、隊列走行を行う他車からリアルタイムで取得した異常状態の継続時間を計数する計数手段110、120と、継続時間が所定時間となった場合に故障が発生したと判定して故障対応を実行する故障対応手段111、121とを備える。また、計数手段110、120は、1の異常状態の継続時間を計数している場合に、他の異常状態が発生したとき、前記1の異常状態の継続時間の計数を継続することを特徴とする。
(もっと読む)
車両走行制御装置
【課題】先行車両を検出しなくなった場合の自車両の走行速度が低速域であっても、運転者に違和感を与えずに自動遷移制御を行う車速制御装置を提供すること。
【解決手段】先行車両が存在する場合に追従走行し、先行車両が存在しない場合に設定車速で定速走行する車両走行制御装置1であって、先行車両を喪失した自車両の走行速度と前記設定車速との偏差が所定より大きい場合、設定車速に遷移する加速度を、偏差が所定以上の場合より小さく制御する制御手段を有することを特徴とする。
(もっと読む)
車両用走行制御装置
【課題】自車が走行する道路の種類に基づいて最適な走行制御手段を実行させる車両用走行制御装置を提供することを目的とする。
【解決手段】車両を設定速度で走行させる定速走行制御手段10と車両を設定車間距離で走行させる追従走行制御手段11とを有する車両用走行制御装置1は、車両位置における道路の種類を識別する道路種類識別手段12と、道路種類識別手段12により識別された道路の種類に基づいて、実行する走行制御手段を選択する走行制御選択手段13とを備える。
(もっと読む)
車両の走行制御装置
【課題】 車両が停止中にシフトレバーなどの操作をした場合でもドライバの意図することなく車両が走行することを防止することができる走行制御装置を提供する。
【解決手段】 車間制御ECU2は、車間制御部21および制御解除部22を備えている、車間制御部21は、先行車両との車間距離や車両の車速に基づいて、先行車両を追従する先行車両追従制御を行う。制御解除部22は、車両の走行中にシフトポジションがニュートラルレンジとされた場合に車間制御部21の制御を解除する。また、車両の停止中にシフトポジションがニュートラルレンジとされた場合に車間制御部21による車間制御の制御解除を中止する。
(もっと読む)
車両の走行安全装置
【課題】 予め記憶している道路データに基づく車両の走行安全性を確保しつつ、道路データの修正に要する演算量が過剰に増大することを抑制する。
【解決手段】 カーブ推定部65はカーブ認識部61での道路データに基づく認識結果および比較部63での比較結果に応じて、安全装置が作動している状態での自車両のカーブの通過状態に基づき、カーブの実形状(例えば、極性、半径、曲率、深さ等)を推定する。データ修正部66は、カーブ推定部65にて推定された推定形状と、カーブ認識部61にて認識された認識形状とが同等となるようにして、地図データ記憶部23の道路データを修正する。作動部64は、カーブ推定部65にて推定された実カーブの推定形状が、カーブ認識部61にて認識された地図カーブの認識形状よりも緩いとき、安全装置の次回以降の作動時において安全装置が作動し難くなるように設定する。
(もっと読む)
車両の走行安全装置
【課題】 車両の進行方向前方に存在するカーブを通過する際において、適切に安全装置を作動させる。
【解決手段】 作動部64は、カーブ認識部61での道路データに基づく認識結果および比較部63での比較結果に応じて、警報装置およびブレーキアクチュエータ15等からなる安全装置を作動させることを判定した際に、カーブ認識部61にて認識されたカーブの形状とは異なる道路形状が道路形状認識部65により認識されているとき、安全装置の作動を禁止または抑制する。認識カーブ修正部67は、作動部64により安全装置の作動が禁止または抑制された際に、カーブ認識部61および道路形状認識部65によりカーブが認識されている場合、カーブ認識部61が認識したカーブの入口位置を道路形状認識部65が認識したカーブの入口位置に基づき修正する。
(もっと読む)
車両の制御装置
【課題】 操作性を悪化させることなく、乗員が望む停止位置で車両を停止させる。
【解決手段】 ECT_ECUは、アクセル開度Pを検出するステップ(S124)と、アクセル開度Pの変化量ΔPを検出するステップ(S126)と、アクセル開度Pの変化量ΔPに基づいて目標移動距離LIを算出するステップ(S128)と、算出された目標移動距離LIの総和である総移動距離LAを算出するステップ(S130)と、車両の実走距離が総移動距離LAとなるように車両を制御するステップ(S132)と、アクセル開度変化率DPが0であるという条件、アクセル開度変化率DPがDP(0)(DP(0)≒0)より小さいという条件およびブレーキペダルが踏まれたという条件の少なくともいずれかが満たされた場合(S136にてYES)、車両の移動を停止するステップ(S138)とを含む、プログラムを実行する。
(もっと読む)
1 - 20 / 24
[ Back to top ]