
Fターム[3D244AB00]の内容
定速走行制御 (7,912) | 適用車種 (544)
Fターム[3D244AB00]の下位に属するFターム
一般車両 (501)
農業車両 (18)
建設、土木、産業車両 (12)
Fターム[3D244AB00]に分類される特許
1 - 13 / 13
鞍乗り型車両のスロットル制御装置
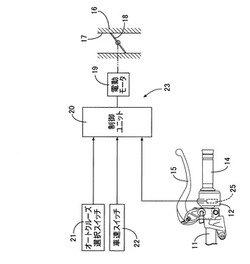
【課題】スロットルグリップとの回動操作量をスロットルパイプの回動に応じて検出するようにしてケース内の固定位置にスロットルセンサが配設され、スロットルバルブを開閉駆動するアクチュエータの作動が、スロットルセンサの検出値に基づいて制御ユニットによって制御される鞍乗り型車両のスロットル制御装置において、オートクルーズ制御装置の作動をキャンセルするにあたってキャンセルスイッチを不要として、部品点数を低減するとともにバーハンドルに固定されるケースのコンパクト化を可能とする。
【解決手段】制御ユニット20が、スロットル開度を全閉とするための全閉位置からスロットル閉じ側にスロットルグリップ14を回動操作したことをスロットルセンサ25が検出するのに応じて、オートクルーズ制御装置23の作動をキャンセルする。
(もっと読む)
車両用制動制御装置

【課題】車両用制動制御装置において、車両の定速走行制御時であっても、十分な負圧を確保して操作部材の操作力を適正に高めることで、十分な制動力を確保して制動操作フィーリングの向上を図る。
【解決手段】ハイブリッド車両11にて、車速が予め設定された目標車速となるようにエンジン12の出力とモータ16,19の出力が調整される定速走行制御を実行中であるとき、エンジン12の回転数が予め設定された所定値を超え、且つ、燃料カットの実行が検出されると、エンジン12の吸気管227に設けられたスロットル弁229を閉止する。
(もっと読む)
車両およびその制御方法
【課題】定速走行指示がなされたときにより適正な制御を行なう。
【解決手段】モータからの動力を用いて走行する電気自動車において、定速走行が指示されたときに(ステップS110)、要求トルクTd*が負のトルクであると共に車両の状態がクリープトルク出力領域にあるときには(ステップS160,S200)、モータから出力するクリープトルクを徐減させて値0にすると共に(ステップS230〜S290)駆動輪に要求トルクTd*に基づく制動力を作用させる(ステップS300,S310)。こうした制御によりモータから駆動方向のトルク(クリープトルク)を出力する一方で駆動輪に制動力を作用させるものに比して、より適正な制御を行なうことができ、エネルギ効率の向上を図ることができる。
(もっと読む)
車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体
【課題】ハイブリッド車両の運転者がEVスイッチおよびクルーズスイッチの双方をオンしている場合において、運転者の意図と著しく異なる走行状態になることを抑制する。
【解決手段】ECUは、EVスイッチ406のオンオフを検出するステップ(S100)と、クルーズスイッチ408のオンオフを検出するステップ(S102)と、EVスイッチおよびクルーズスイッチの双方がオンであるか否かを判断するステップ(S104)と、双方がオンであると(S104にてYES)、インバータ240およびエンジンECU280に対するEV走行制御指令の送信を禁止するステップ(S106)と、クルーズ走行制御指令を送信するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
エンジンの定速運転を変速制御可能な装置と結合する動力システム
【課題】エンジンの定速運転を変速制御可能な装置と結合する動力システムを提供する。
【解決手段】エンジン100が静止状態から起動、及び低速から加速して駆動する過程に、エンジン100を制御して、定速又は定速に近い速度で正味燃料消費率がより高い回転速度区域に運転させることができる。又、エンジンの出力端より、能動的に有段又は無段変速を制御可能な前側変速装置102を駆動することで、出力端から起動、及び低速から加速して駆動する過程及び運転を駆動する場合、エンジンが正味燃料消費率の比較的高い回転速度区域に運転することで、燃料を節約することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両の乗員が走行挙動に違和感を与えることを防止しつつ燃費効率を向上させるハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド・マネジメントECU36は、車速VPをセット車速VCに追従させるクルーズコントロールの制御時のパラレル運転モードの状態で、パワープラント要求トルクの加算側の更新を規制し、ロックアップ上限トルクに係る所定トルク値に保持するようにし、車速VPが、セット車速VCから車速偏差の上限値ΔVSを減算して得た値未満に低下したとき、シリーズ運転モードに切り換える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジン回転数の急上昇を伴うことなく大きな減速度を得ることが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力を出力すると共に回生制動力を作用させるモータジェネレータと、目標車速を達成するように前記モータジェネレータの制駆動力を制御する自動走行制御手段と、を備えたハイブリッド車両の制御装置において、前記駆動輪に対して前記回生制動力を限界まで作用させたにも関わらず前記目標車速を上回った場合に下り勾配と判定する下り勾配走行判定手段と、下り勾配と判定した場合に前記モータジェネレータの回生制動力限界値を前記回生制動力が大きくなるように変更する限界値変更手段とを備えた。
(もっと読む)
車両用定速走行制御装置
【課題】 実際に車両が制動可能であるにもかかわらず、信号等の軽微な故障によって定速走行制御が解除されるのを回避することができる車両用定速走行制御装置を提供する。
【解決手段】 あらかじめ設定された設定車速を維持して車両を定速走行させる車両用定速走行制御装置において、制動系の制動動作を検出する制動動作検出手段(マスタシリンダ圧センサ17、ホイールシリンダ圧センサ30)と、制動動作が検出された場合、定速走行を解除する定速走行解除手段と、を備える。
(もっと読む)
ハイブリッド車両の運行制御システム
【課題】追従走行機能を有するハイブリッド車両において、燃費をさらに向上させることである。
【解決手段】ハイブリッド車両が追従走行条件のもとで走行していると判断されると、前方車車速Vspdfが取得され、エンジン停止設定車速Vspdpと比較され、さらに、Vspdf+αとVspdpとが比較される(S10−S18)。Vspdf<Vspdpのときは、エンジン始動開始条件を引き上げてエンジン始動開始を遅らせ、エンジン停止のままモータで走行する期間を増やし、燃費改善を図る(S20)。Vspdf+α>Vspdpであると判断されない場合には、自車の車速VspdrをVspdpに設定し、エンジン始動開始を遅らせ、エンジン停止のままモータで走行する期間を増やし、燃費改善を図る(S22)。Vspdf+α>Vspdpのときは、通常のクルーズ制御が行われる(S24)。
(もっと読む)
鞍乗り型車両
【課題】スロットル弁が固着される弁軸が吸気路形成体に回動可能に支承され、スロットルグリップの回動操作に応じて作動する弁軸駆動用電動モータを有するアクチュエータが弁軸の一端に連結され、スロットルグリップに弁軸の回動作動がフィードバックされる鞍乗り型車両において、ケーブルの取りまわしを不要として、弁軸駆動用電動モータで回動駆動される弁軸の回動作動をスロットルグリップにフィードバック可能とする。
【解決手段】アクチュエータの作動に伴う弁軸の回動量に応じた作動量で作動するグリップ駆動用電動モータ37が、操向ハンドル35に配設されるとともにスロットルグリップ36に連動、連結される。
(もっと読む)
運転装置の制御装置
【課題】運転者の能力等に合わせて操作装置の操作性を調整でき、車両の運転を容易化することが可能な運転装置の制御装置を提供する。
【解決手段】操作レバー20を含み操作レバー20の操作位置を出力する操作装置10と、車両のブレーキ及びアクセルを動作させる駆動系60,70とを備える運転装置において、操作位置に応じて駆動系60,70の制御量を決定し制御する制御装置50であって、操作位置と駆動系60,70の制御量との関係を変更可能に形成されている。この構成によれば、ユーザの能力、好みや車両の状況に合わせて操作装置10の操作性を調整できる。
(もっと読む)
車両制御装置及び車両制御方法
【課題】案内交差点において車両を十分快適に走行させることができるようにする。
【解決手段】現在地を検出する現在地検出部と、経路案内で案内される案内交差点における進入レーン及び退出レーンを判断するレーン判定処理手段と、前記進入レーン及び退出レーンに基づいて、案内交差点内の走行軌跡を予測する走行軌跡予測処理手段と、前記走行軌跡に基づいて車両制御を行う車両制御処理手段とを有する。進入レーン及び退出レーンに基づいて走行軌跡が予測され、走行軌跡に基づいて車両制御を行うことができる。
(もっと読む)
車両用駆動力制御装置
【課題】車間距離に応じて変速機の変速制御が行われる技術において、自車が前車を追い越すと推定又は検出される場合には、自車が前車を追い越さないと推定又は検出される場合に比べて、より大きな駆動力が得られ易い変速機の変速制御が行われる車両用駆動力制御装置を提供する。
【解決手段】運転者が先行車との位置関係を保つような走行を望むか、又は前記先行車を追い越す走行を望むかを推定する推定手段を備え、前記先行車を追い越す走行を望むと推定される場合には、前記先行車との位置関係を保つような走行を望むと推定される場合に比べて、前記相対的に低速用の変速段への変速が実行され易くされる、又は、前記先行車を追い越す走行を望むと推定される場合には、前記先行車との位置関係を保つような走行を望むと推定される場合に比べて、より低速用の変速段への変速が実行される。
(もっと読む)
1 - 13 / 13
[ Back to top ]