
Fターム[3D244AC02]の内容
定速走行制御 (7,912) | 入力信号 (2,923) | 車両の状態に関するもの (1,907) | 推進装置 (616)
Fターム[3D244AC02]の下位に属するFターム
スロットル弁開度 (119)
機関軸回転数、出力、トルク (126)
エンジン温度、冷却水温 (17)
吸気圧、吸気温 (15)
気筒数 (1)
始動 (5)
アクセルペダル (312)
Fターム[3D244AC02]に分類される特許
1 - 20 / 21
車両制御装置
【課題】全加減速シーンにおける加速性能を低下させることなく、エネルギー効率の向上を図る。
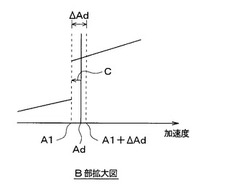
【解決手段】目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内か否かを判定し、目標加減速度Adと境界加減速度Anに基づいて新たにエンジンの駆動が必要と判定した場合でも、目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内であると判定された場合、目標加減速度Adを駆動中のモータにより実現可能な加速度に変更する。
(もっと読む)
車両用走行制御装置

【課題】クルーズ走行等の自動定速走行において、運転者に与える違和感を抑制可能とするとともに、ドライバビリティの向上が可能となる。
【解決手段】運転者が設定した走行状態に自動調整するための目標駆動力を算出する処理を行なっている状態で、目標駆動力に応じた目標駆動トルクが運転者による目標駆動力の減少要求で路面抵抗トルク未満に減少すると、減少した目標駆動トルクが増加へ反転する反転タイミングから増加した目標駆動トルクが路面抵抗トルクとなるまでの目標駆動トルクの増加度合いを変化させ、反転タイミングが運転者による減少要求の停止操作と連動している場合には、反転タイミングが運転者による減少要求の停止操作と連動していない場合よりも目標駆動トルクの増加度合いを大きくする処理を行う。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
田植機のエンジン回転数制御装置
【課題】植付作業中に一時的に走行抵抗(作業抵抗)が大きくなった場合でも、エンスト等のエンジントラブルを防止する田植機のエンジン回転数制御装置を提供する。
【解決手段】エンジン5と、無段変速装置21と、スロットルレバー85と、変速アーム47と、変速ペダル16と、エンジン回転数制御装置95を備えた田植機1において、変速ペダル16の位置を検出する第一検出手段55と、スロットルレバー85を操作する回転数変更アクチュエータ88と、変速アーム47を操作する変速アクチュエータ60と、エンジン5の出力負荷を検出するエンジン出力負荷検出手段90と、制御装置80とを備え、制御装置80は、エンジン出力負荷検出手段90の検出結果によりエンジン5の出力負荷が所定値以上の時、変速ペダル16の変速操作量に応じたエンジン5の回転数に維持するようにスロットルレバー85を制御する田植機1のエンジン回転数制御装置である。
(もっと読む)
車両の定速走行制御装置
【課題】制御系の制御対象をスロットル開度と変速比の2つを入力、車速を出力とするモデルで記述することにより、スロットル開度と変速比を協調させて定速走行制御を行うようにした定速走行制御装置を提供する。
【解決手段】エンジンと、その出力を変速する変速機と、それらが搭載される車体とを少なくとも備えた車両の定速走行制御装置において、車両システムを制御対象とし、少なくとも変速比とスロットル開度とを入力、車速を出力とするモデルで記述すると共に、車速が目標車速に一致するように、変速比とスロットル開度を制御する制御系(定速走行制御コントローラ)を備えると共に、制御系の指令に応じてエンジンのスロットルバルブを駆動してスロットル開度を調整するDBW機構と、変速機に油圧を供給する油圧機構などを備える。
(もっと読む)
走行制御装置
【課題】車両周囲の交通状況の変化に応じて行われた運転者の操作を尊重して円滑に追従走行を制御可能な走行制御装置を提供する。
【解決手段】制御ステート決定部17は定期的に起動して、制御開始スイッチ26が押されたか否かを判定する。制御開始スイッチ26が押された場合、ブレーキスイッチ29の出力信号に基づいて、ブレーキがON状態であるか否かを判定する。もし、ブレーキがON状態であった場合、ブレーキがON状態からOFF状態に変化したか否かを判定する。そして、ブレーキがON状態からOFF状態に変化した場合、ブレーキスイッチ29の出力信号の立ち下がりの変化点に基づいて、先行車両に対する追従走行制御を開始する。
一方、ブレーキがOFF状態からON状態に変化した場合、ブレーキスイッチ29の出力信号の立ち上がりの変化点に基づいて、先行車両に対する追従走行制御を終了する。
(もっと読む)
車両用走行制御装置
【課題】ドライバが設定車速の変更操作中に、ナビゲーション装置から得られる制限車速に変更された時に、設定車速と制限車速とを一致させる。
【解決手段】車両用走行制御装置は、車両が定速走行する際の設定車速を設定するための操作手段2と、自車両が走行している道路の制限車速を取得する制限車速取得手段3とを備える。そして、変更手段1は、操作手段2による設定と、制限車速取得手段3により取得された制限車速の変化とが所定条件を満たす場合に、操作手段2による設定を無効にする。さらに、変更手段1は、設定車速を制限車速取得手段3により取得された制限車速と一致するように変更する。
(もっと読む)
車両走行制御装置
【課題】駆動から制動への過渡領域の減速度の不足を防止できる車両走行制御装置を提供すること。
【解決手段】本発明による車両走行制御装置1は、車両の走行状態に基づいて目標駆動力を演算する目標駆動力演算手段2と、目標駆動力に基づいて車両の駆動装置を制御する駆動制御手段3と、目標駆動力が前記駆動装置の駆動力実現範囲の下限値よりも小さい場合に車両の制動装置を制御する制動制御手段4と、車両の減速状態を検出する減速状態検出手段と、減速状態が検出されて、目標駆動力が駆動力実現範囲の下限値よりも大きい場合に、目標駆動力を所定の補正量だけ小さい側に補正する補正手段2とを備えることを特徴とする。
(もっと読む)
車両およびその制御方法
【課題】目標車速で定速走行するときに駆動装置から出力可能な許容駆動力をより適正に設定すると共にその範囲内の駆動力を駆動装置から出力して定速走行する。
【解決手段】車速Vと目標車速V*とにより目標車速V*で定速走行するために出力すべきトルクとして要求トルクTr*を求め、この要求トルクTr*を、車速起因最大トルクTvmax,アクセル開度起因最大トルクTacc,車速リミット起因最大トルクTvlim,スノーモード起因最大トルクTsnow,最大回転数起因最大トルクTrev,モータ温度起因最大トルクTmg,入出力制限起因最大トルクTbatのうち最も小さなトルクとして設定された許容トルクTlimによって制限して実行用トルクT*を設定し、実行用トルクT*が駆動軸に出力されるようエンジンやモータMG1,MG2を制御する。
(もっと読む)
車両の走行制御装置
【課題】先行車との車間距離に係る複数の制御系として、高速道路走行時のみ使われることを前提に構成される制御系A、一般道路走行時にも使われることを前提に構成される制御系B、を備える車両の走行制御装置において、仮想的な車線形状から確定される先行車に対する捕捉性を高める。
【解決手段】自車進行路の車線幅として制御系Aの動作モード時に高速道路走行に適合する車線幅を設定すると共にそれ以外のときは一般道路走行に適合する車線幅に設定する手段(S6〜S8)、自車進行路の曲率と車線幅とから自車進行路の車線形状を設定する手段(S9)、自車進行路の車線形状上の最も近い前方車を先行車と確定する手段(S10)、を備える。
(もっと読む)
ハイブリッド車両の定速走行制御装置
【課題】走行抵抗の大きい路面から走行抵抗の低い路面に進入した際に、回生ブレーキを効果的に用いる。
【解決手段】車両を一定速度に保つ定速走行制御が行われている時に、走行抵抗の増加量が所定値以上であると判定されると、バッテリのSOCとSOC上限値との差を拡大する。これにより、走行抵抗の大きな路面から走行抵抗の小さな路面に戻った時に、モータジェネレータの回生運転によって発電される電力をバッテリが受け入れる量を多くして、回生ブレーキの効果を大きくすることができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジン回転数の急上昇を伴うことなく大きな減速度を得ることが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力を出力すると共に回生制動力を作用させるモータジェネレータと、目標車速を達成するように前記モータジェネレータの制駆動力を制御する自動走行制御手段と、を備えたハイブリッド車両の制御装置において、前記駆動輪に対して前記回生制動力を限界まで作用させたにも関わらず前記目標車速を上回った場合に下り勾配と判定する下り勾配走行判定手段と、下り勾配と判定した場合に前記モータジェネレータの回生制動力限界値を前記回生制動力が大きくなるように変更する限界値変更手段とを備えた。
(もっと読む)
走行制御装置
【課題】車間制御において目標車間時間を切り替えたときの制御官能の低下を抑制する走行制御装置を提供することを課題とする。
【解決手段】目標車間時間になるように車間制御を行い、目標車間時間を切り替え可能な走行制御装置1であって、切替前の目標車間時間に応じた要求加速度と切替後の目標車間時間に応じた要求加速度に基づいて目標車間時間切替中の要求加速度を求めることを特徴とし、切替前と切替後の両方の要求加速度を考慮して切替中の要求加速度を求めているので、切替中の車両の加速や減速の急変を抑制でき、制御官能の低下を抑制することができる。
(もっと読む)
車両用走行制御装置
【課題】走行状態に応じた適切な定速走行を実現する車両用走行制御装置を提供すること。
【解決手段】ハイブリッド車を定速走行させる車両用走行制御装置に、自車両と自車両前方を走行中の先行車との車間距離を検出する検出手段と、この検出手段により検出された上記車間距離に基づいて駆動力を制御することにより所定の定速走行を実現する制御手段とを備える。制御手段は、自車両の車速に応じて最小車間距離を設定し、上記車間距離が最小車間距離よりも小さくなったときに駆動力の発生を停止させて自車両を惰性走行させると共に、自車両の車速に応じて最大車間距離を設定し、惰性走行中、上記車間距離が最大車間距離よりも大きくなったときに駆動力の発生を開始する。
(もっと読む)
運転支援装置、運転支援システムおよび運転支援プログラム
【課題】的確な運転支援を可能にする運転支援装置、運転支援システムおよび運転支援プログラムを提供する。
【解決手段】本運転支援システムによると、他車両100のナビゲーション装置120では、他車両100の制動に関する他車制動情報を生成し、それをランプ制御ECUに出力して、他車両100の外部にブレーキランプ146による光データを送信する。自車両200では、他車両100のナビゲーション装置120から出力された他車制動情報を取得し、これに基づいて自車両200の制動に関する自車制動情報を生成しこの自車制動情報をディスプレィや制動アシストECUに出力する。これにより、他車両100の制動に関する他車制動情報に基づいて当該他車両100の将来の挙動を予測することがある程度可能になるため、このような予測可能な他車両100の将来の挙動をも踏まえて自車制動情報を生成することができ、的確な運転支援を可能にする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】減速時に、燃費向上を図り、効率良く回生を行うことのできるハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の運転状態に基づいて、エンジンのクランク軸におけるクランク端目標トルクを算出し、クランク端目標トルクが予め定められる所定値よりも小さい場合にハイブリッド車両の減速状態と判断し、その直後からロックアップクラッチを締結し、減速状態が判断された場合に、クランク端目標トルクに基づき、エンジンのエンジン目標トルク及びモータジェネレータのモータ目標トルクを算出し、減速トルク算出手段により算出された前記モータ目標トルクに基づいて、モータジェネレータによる回生が行われるよう制御する。
(もっと読む)
自動車の追従走行装置
【課題】
自動車の追従走行装置において、自車両のギクシャク運転を抑制し、乗員の乗り心地や安心感の向上を図ることを課題とする。
【解決手段】
追従走行装置1は、車間距離検出手段11で検出された前方車両Wfと自車両Wとの車間距離L1が目標車間距離Ltに維持されるように自車両Wの車速vを制御する車速制御手段17,18を備えている。追従走行装置1は、前々方車両Wffと前方車両Wfとの車間距離L2が所定の車間距離Lmよりも短くなったときは短くなっていないときよりも車速制御手段17,18の制御感度を鈍化させるコントロールユニット10を備えている。
(もっと読む)
ハイブリッド車の定速走行制御装置
【課題】 定速走行制御中、エンジン系やモータ強電系の入出力が制限されても、定速走行制御の適用を継続することができるハイブリッド車の定速走行制御装置を提供すること。
【解決手段】 駆動源としてエンジン301と駆動用モータ303を有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置において、前記定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定する手段とした。
(もっと読む)
乗員保護システム、及び乗員保護装置
【課題】乗員、特に子供の安全性を向上させるための乗員保護システムを提供すること
。
【解決手段】車両の乗員の安全性を図るための乗員保護システムにおいて、乗員が大人
であるか子供であるかを判別する大人子供判別手段と、乗員の位置を検出する乗員位置検
出手段と、大人子供判別手段による判別結果、及び乗員位置検出手段による検出結果に基
づいて得られる、子供の乗車状況に応じて、車載機器の制御を行う子供保護制御手段とを
装備する。
(もっと読む)
車両用走行制御装置
【課題】 曲線路で隣接車と長い時間並走することを避け、隣接車との異常接近を防止する。
【解決手段】 自車前方の曲線路までの距離と、隣接車との車間距離および相対速度と、自車速とに基づいて自車前方の曲線路で隣接車と並走するか否かを判定し、自車前方の曲線路で隣接車と並走すると判定され、かつ隣接車との相対速度が第1のしきい値以下の場合に、自車前方の曲線路で隣接車との並走を禁止する。
(もっと読む)
1 - 20 / 21
[ Back to top ]