
Fターム[3D244AC03]の内容
定速走行制御 (7,912) | 入力信号 (2,923) | 車両の状態に関するもの (1,907) | 推進装置 (616) | スロットル弁開度 (119)
Fターム[3D244AC03]に分類される特許
1 - 20 / 119
先行車追従走行装置及び運転支援システム
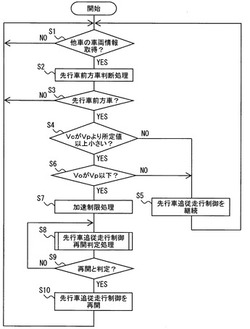
【課題】先行車追従走行を行うものにおいて、燃費の悪化をより抑制することを可能にする。
【解決手段】先行車の速度と、車車間通信で取得した先行車と同一道路上の先行車の進行方向前方に位置する先行車前方車の速度情報とをもとに、当該先行車前方車の速度が先行車の速度よりも所定値以上小さいか否かを判定する。そして、肯定判定した場合であって、且つ、自車の速度が先行車の速度以下の場合には、先行車追従制御を中断し、自車の速度を維持することで加速を抑制する。
(もっと読む)
運転支援装置及び運転支援方法

【課題】カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度情報を更新可能とする。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
(もっと読む)
車両用運転支援装置
【課題】先行車のみならず自車走行路上に存在する信号機に対しても制御対象を拡張して好適な走行制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ステレオ画像認識装置4で停止指示信号機が認識されているとき、当該停止指示信号機の停止位置Pstpに自車両1を停止させるための信号機用目標加速度asigを演算し、追従走行用目標加速度acarが演算されていない場合であって信号機用目標加速度asigが演算されている場合には信号機用目標加速度asigを追従走行用目標加速度acarとして代用し、追従走行用目標加速度acar及び信号機用目標加速度asigが演算されている場合であって信号機用目標加速度asigが追従走行用目標加速度acarよりも小値である場合には信号機用目標加速度asigの値を追従走行用目標加速度acarとして代用する。
(もっと読む)
車両用運転支援装置
【課題】勾配路での変速機のダウンシフトが行われない場合にも、ブレーキの自動介入時間を増加させることなく良好な車速制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ACCの実行中にブレーキの自動介入制御が設定時間t0以上継続したことを判定したとき、目標加速度aを予め設定された負側の値Bまで変化させ、変化させた目標加速度aを、基本目標加速度a0が正側の設定値a0thを越えるまでの間維持する割込制御を行う。
(もっと読む)
車両の駆動制御装置
【課題】駆動側が遠心式のベルト式無段変速機と電子スロットル部とを備える構成で、電子スロットル部のモードに合わせた適切なドリブン推力を設定し、燃料の節約を図ることができる車両の駆動制御装置を提供する。
【解決手段】電子スロットル制御部31は、選択された運転モードに応じて吸気絞り弁21の開度を制御し、従動側接圧力可変部36は、所定車速を越えると、又は、スロットルグリップ26の開度が一定の状態が継続すると、従動プーリー51とベルト45との接圧力を低減させるようにした。
(もっと読む)
車間距離制御装置及び車間距離制御方法
【課題】目標車間距離Lの初期値を大きな値に設定しなくとも、追従走行制御可能な車間距離範囲を大きくすることができ、運転者にとって違和感の低い追従走行制御を可能とする。
【解決手段】自車両MM進行方向に存在する先行車両と自車両MMとの車間距離Lrelが予め設定した制御開始距離以下になったと判定すると追従走行制御を開始して、上記車間距離Lrelが予め設定した目標車間距離Lとなるように自車両MMの制駆動力の制御を行う。そして、設定したアクセル開度初期値AP0に対し、現在のアクセル開度が大きい場合には上記目標車間距離Lを減少補正し、現在のアクセル開度が小さい場合には上記目標車間距離Lを増大補正する。
(もっと読む)
オートクルーズ制御装置
【課題】オートクルーズ走行中の車間距離制御において減速を行うとき、適切なタイミングでシフトダウンを行うことで、前走車が加速に移行したときにも円滑に追従することのできるオートクルーズ制御装置を提供すること。
【解決手段】オートクルーズ制御実行中(S1)に車間距離制御(S2)が行われて、減速を行うときは(S4)、目標車速に応じて設定されるオートクルーズ制御用の変速に係る減速時のエンジン回転数閾値よりも高い値である車間距離制御用の減速時のエンジン回転数閾値を用い、エンジン回転数が当該閾値以下である場合(S8)にシフトダウンを実施する(S9)。
(もっと読む)
自動車の自動変速機の制御方法
【課題】道路勾配に応じて簡単な操作で運転プログラムが割当てられる、クルーズコントロールを備えた自動車の制御方法を提供する。
【解決手段】クルーズコントロールを備えた自動車の自動変速機の制御方法は、変速機制御がクルーズコントロールのもとで外的影響、特に道路勾配に関連する別個の運転プログラムに切換えるものである。この運転プログラムは外的影響に応じて更新される。状態「設定」で別個の運転プログラムに切換えられ、状態「復帰」で運転プログラムが直ちに又は制御状態「設定」に到達した後に初めて作動されるように、変速機制御を調整することができる。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
他車認識システム
【課題】周辺物検出装置で見失った監視対象車両と新たな検出車両との同一性判断。
【解決手段】自車の周辺の他車情報を受信する通信装置30と、自車の周辺の他車を検出する周辺物検出装置20と、を備え、前記他車情報の発信車両が前記周辺物検出装置20の検出範囲から離脱した際の離脱方向と、前記発信車両が前記検出範囲から離脱した後で車両が前記検出範囲に進入した際の進入方向と、に基づいて、前記検出範囲に進入した車両が前記発信車両と同一の車両か判断すること。その際、前記進入方向と前記離脱方向とが異なる場合に、前記検出範囲に進入した車両を前記発信車両とは異なる車両と判断する。
(もっと読む)
車両の制御装置
【課題】車速を目標車速に制御するクルーズコントロールが実行可能な車両において、クルーズコントロール実行中のエネルギ消費を抑制して効率を高める。
【解決手段】クルーズコントロール時にはドライバが継続的な定速走行を希望しており、回生による制動力を発生させる必要がない点に着目し、クルーズコントロール時に定速走行管理範囲(具体的には、許容下限値M≦[加速度α]≦許容上限値N、及び、許容下限値m≦[車速V]≦許容上限値の範囲)内で惰行走行状態を作り出すことにより、エネルギの消費を低減するとともに、エネルギの電気パス通過分を抑制してエネルギ損失を低減する。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
トラクタ
【課題】本発明では、作業中のエンジン回転数を負荷変動に応じて素早く最適燃費ラインの回転数に近づけるようにすることで、燃料消費量が少ないトラクタの走行制御装置を提供することを課題とする。
【解決手段】アクセルレバー33或はアクセルペダル34の開閉度合いを検出するスロットルセンサ20と、エンジン2の出力軸の回転数を検出するエンジン回転センサ22を設けると共に、前記スロットルセンサ20の検出開度に応じた最適回転数を制御装置40に記憶し、前記エンジン回転センサ22が検出するエンジン回転数とスロットルセンサ20の検出開度に応じた最適回転数の差を所定範囲に収めるように、エンジン回転制御部27と主変速制御部28とPTO変速制御部29を制御するように構成したことを特徴とするトラクタの構成とする。
(もっと読む)
作業車の走行制御装置
【課題】本発明は、トロイダル変速機構を搭載した作業車で、変速比を一定にして走行を維持する定車速モードで走行している場合に、旋回操作を行えば急激な走行速度の低下を防止して速やかな旋回を行わせ、作業能率を低下させない作業車を提供することが課題である。
【解決手段】エンジンEが適宜回転数でトロイダル変速機構4の変速比を一定に固定して走行する定車速モードと左右走行装置8の旋回角を検出する旋回角検出手段130を設け、設定速度を定速度T1に設定して定車速モードで走行中に旋回を行うときにおいて、旋回内側のブレーキ作動が始まる直前の前旋回角αで設定速度を増速度T2に変更し、旋回内側のブレーキ作動が終了する直前の終旋回角βで設定速度を元の定速度T1に変更するように制御してなる作業車の走行制御装置の構成とする。
(もっと読む)
車両制御装置
【課題】通常の全閉位置からさらに閉じ方向に過回動可能なアクセルグリップを構成するとともに、アクセルグリップの過回動を検知してクルーズコントロール制御を自動的に解除可能な車両制御装置を提案する。
【解決手段】車両制御装置21は、アクセルグリップ23と、アクセルグリップ23を周方向一方側に回動付勢するアクセル戻しスプリング54と、アクセル戻しスプリング54に抗してアクセルグリップ23の回動を規制し、所定の開度に位置させるとともに、アクセルグリップ23に周方向一方側へ向かう所定以上の操作力が負荷されるとアクセルグリップ23の規制が解除され、アクセルグリップ23を所定の開度を越えて周方向一方側へ過回動可能なアクセルグリップ過回動機構部55と、を備える。
(もっと読む)
定速走行制御装置
【課題】アクセルペダル操作によって目標車速を変更できる定速走行制御装置において、様々な運転シーンにおいて違和感の少ない加減速度制御を行うことができるようにする。
【解決手段】アクセルペダルの操作量に応じて変更される目標車速Vo_tと現在の自車速Vo_pとを用いて算出される要求加速度Gx_tを、要求加速度変更手段55において、加速度上限値によって制限する。この加速度上限値は、現在の自車速Vo_pが現在車速閾値TH_pよりも高い場合、現在の自車速Vo_pがそれよりも低い場合より低く設定される。そのため、高速走行中における意図しない急加速を抑制することができる。また、アクセルペダルが大きく踏み込まれ高い目標車速Vo_tが設定されたときには、1よりも大きい第1ゲインが乗じられて加速度上限値が高い値に変更される結果、高い要求加速度Gx_tが設定されることになる。
(もっと読む)
ドライバ状態検出装置、車載警報装置、運転支援システム
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。このドライバ状態係数Kは、自車両に先行車両の画像を撮影する撮像手段を備えておき、その撮像手段の撮影した先行車両の画像の面積の単位時間当たりの変化度合いから算出する。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】
車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、車間制御ECU20がACC制御を実行しているときに、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に車間制御ECU20は、運転者のアクセル操作があったときは加速抑制制御を続行し、当該アクセル操作後に再度のアクセル操作があり、運転者が居眠りや意識低下の状態にないことが明らかであるときは加速抑制制御を解除する。これにより、安全性を確保しつつ運転者に与える違和感を軽減することができる。
(もっと読む)
車速制御装置、車速制御方法
【課題】先行車両との関係に応じて上限車速が可変に設定される車速制御装置及び車速制御方法を提供すること。
【解決手段】先行車両が補足された場合は予め定められたセット車速31を上限に追従走行する追従走行手段24、25と、アクセルペダル14が踏み込まれても予め設定した上限車速により車速を制限する上限車速制限手段23と、を有する車速制御装置100であって、アクセルペダル14の操作を検出するアクセルペダル操作検出手段19と、先行車両との相対速度を検出する相対速度検出手段12と、自車両の車速を検出する自車両速度検出手段11と、相対速度から先行車両に接近していると判定され、かつ、アクセルペダル14の操作が検出された場合、上限車速32を先行車両の車速以下に設定する上限車速変更手段21と、を有することを特徴とする。
(もっと読む)
1 - 20 / 119
[ Back to top ]