
Fターム[3D244AC15]の内容
定速走行制御 (7,912) | 入力信号 (2,923) | 車両の状態に関するもの (1,907) | 推進装置 (616) | アクセルペダル (312)
Fターム[3D244AC15]の下位に属するFターム
踏込み量、踏込み速さ (89)
Fターム[3D244AC15]に分類される特許
1 - 20 / 223
車両用制御装置及び車両用制御方法
【課題】適切なタイミングで自動停止後のエンジンを再始動させることが可能な車両用制御装置及び車両用制御方法を提供する。
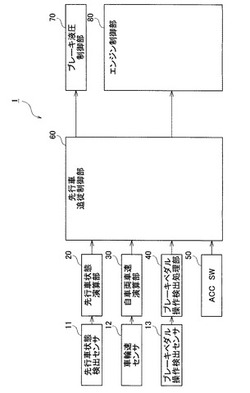
【解決手段】エンジン制御部80は、エンジンの自動停止条件を満たす場合にエンジンを自動停止させると共に、エンジンが自動停止された後に再始動条件を満たす場合にエンジンを再始動させる。ブレーキ油圧制御部70とエンジン制御部80とは、先行車両の追従状態において自車両の停止条件を満たす場合に先行車両に追従して自車両を自動停止させると共に、自車両の発進条件を満たす場合に先行車両に追従して自車両を自動発進させる。また、先行車状態演算部20は、先行車両の加速度を検出し、先行車追従制御部60は、検出された加速度に基づいて、自車両を自動発進させる際の発進目標加速度を演算する。エンジン制御部80は、演算された発進目標加速度を再始動条件の1つとし、再始動条件を満たす場合にエンジンを再始動させる。
(もっと読む)
車両制御装置

【課題】ACC制御とPCS制御を行っている自車両で、適切な制御対象物に対してACC制御の目標加速度を正確に算出することのできる車両制御装置を提供する。
【解決手段】物体を検出する検出手段と、当該物体を先行車両とし当該先行車両と自車両との車間距離を制御する車速制御手段と、検出手段によって検出された物体を衝突判断対象物とし当該衝突判断対象物と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断対象物と自車両とが衝突する可能性が高いと衝突判断手段が判断した場合に衝突判断対象物と自車両との衝突を回避するための回避制御を前記自車両に対して行う制御手段と、回避制御と自車両の車速の制御とが行われているときに予め定められた条件を満たした場合に、自車両の車速の制御を停止する停止手段とを備える。
(もっと読む)
車両用走行制御装置
【課題】先行車に追従するように走行制御を実施する際に、より適切なタイミングで加減速を発生可能とする。
【解決手段】先行車と自車との間の検出した車間相対値と目標車間相対値とに基づき目標車速を算出し、その算出した目標車速から自車の目標加減速度を算出する。そして、その算出した目標加減速度とする制駆動力制御量となるように自車の駆動装置及び制動装置を制御する。このとき、本発明の一形態は、自車の制御状態及び先行車の車両状態の少なくとも一方に応じて、上記制駆動力制御量を補正する。
(もっと読む)
車両用走行制御装置
【課題】先行車に追従するように走行制御を実施する際に、より適切なタイミングで加減速を発生可能とする。
【解決手段】目標車間時間とするための第1目標加減速度指令値、または目標車間距離を達成するための第2目標加減速度指令値のいずれかの目標加減速度指令値を、自車の走行状態及び自車周囲の他車両の走行状態の少なくとも一方の走行状態に基づき選択する。そして、選択した目標加減速度指令値で自車の駆動装置及び制動装置の少なくとも一方を制御する。
(もっと読む)
クルーズコントロールシステム
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
車両の駆動制御装置
【課題】駆動側が遠心式のベルト式無段変速機と電子スロットル部とを備える構成で、電子スロットル部のモードに合わせた適切なドリブン推力を設定し、燃料の節約を図ることができる車両の駆動制御装置を提供する。
【解決手段】電子スロットル制御部31は、選択された運転モードに応じて吸気絞り弁21の開度を制御し、従動側接圧力可変部36は、所定車速を越えると、又は、スロットルグリップ26の開度が一定の状態が継続すると、従動プーリー51とベルト45との接圧力を低減させるようにした。
(もっと読む)
走行制御装置
【課題】不要な加速を抑制するとともに、先行車両に対して安定して追従することができる走行制御装置を提供する。
【解決手段】本発明に係る走行制御装置1は、自車両が走行している車線上で、自車両の最も近くに存在する先行車両の走行状態を判定する先行車両走行状態判定部21と、先行車両走行状態判定部21によって判定された先行車両の走行状態に基づいて、加速度の制限値を設定して自車両の走行制御を行う走行制御部22と、を備える。
(もっと読む)
車両駆動ユニットの制御装置
【課題】クルーズモード実行中に異常トルクが検出されたとき、自動的且つ安全に適切なクルーズトルク調整。
【解決手段】異常トルクを検出する第1トルク判定部17を有する第1のモジュール19と、第1のモジュール19とは独立且つ併行して異常トルクを検出する第2トルク判定部21を有する第2のモジュールとを含んだ制御手段5を備え、第1のモジュール19には、目標車速設定部25と実車速検出部27が備えられており、第2のモジュールには目標車速設定部26と実車速検出部28に加えて、目標車速V1と実車速V2との差分V0を計測し、差分V0に対応したトルク制限率Sと当該トルク制限率Sに基づいた第2算出トルクT22とを算出するトルク制限率算出部29が備えられており、制御装置5には差分V0が第1データ範囲を越えたとき、トルク制限率Sに基づいて最終的な出力トルクを設定するトルク設定部37が備えられている。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行などの自動走行に移行する際に、運転者に与える違和感を抑えることを可能とする。
【解決手段】運転者によるステアリングスイッチ28の操作によって定速走行に移行する際に、エンジン停止の処理中若しくはエンジン停止処理に移行したと判定すると、EVモードに移行することなく、エンジンを運転状態に復帰させる処理を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 運転者の要求する走行状態を応答よく実現可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 ハイブリッド車両が車速指令値に基づいて走行制御をしているモータ走行モードにおいて、駆動トルク指令値に運転者が所定加速を要求したときの加速用駆動トルクを加算した値がモータ駆動分上限値を越えたときはエンジン併用走行モードを選択することとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クルーズ走行中に設定車速が低下し、その設定車速が達成されるときの違和感を抑制する。
【解決手段】HEVモードを維持している状態で、運転者がステアリングスイッチ28を操作し、コースト操作を行ったら(S13の判定が“Yes”)、コーストフラグをFc=1にセットし(S18)、禁止フラグをFNG=1にセットする(S19)。設定車速Vsを達成するまでは、クルーズ要求トルクTcは負値へと転じ、停止判定閾値TOFFよりも小さくなり、エンジン停止要求となるが(S30の判定が“No”)、禁止フラグがFNG=1にセットされていることで(S25の判定が“No”)、エンジン1はON状態を維持する(S28)。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動定速走行において、運転者に与える違和感を抑制可能とするとともに、ドライバビリティの向上が可能となる。
【解決手段】運転者が設定した走行状態に自動調整するための目標駆動力を算出する処理を行なっている状態で、目標駆動力に応じた目標駆動トルクが運転者による目標駆動力の減少要求で路面抵抗トルク未満に減少すると、減少した目標駆動トルクが増加へ反転する反転タイミングから増加した目標駆動トルクが路面抵抗トルクとなるまでの目標駆動トルクの増加度合いを変化させ、反転タイミングが運転者による減少要求の停止操作と連動している場合には、反転タイミングが運転者による減少要求の停止操作と連動していない場合よりも目標駆動トルクの増加度合いを大きくする処理を行う。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】定速走行制御時における頻繁なエンジンの始動・停止が行われるのを防ぐこと。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両において、走行速度をステアリングスイッチで設定された目標速度を維持するように自動調整する定速走行制御を行っているとき、エンジン1の始動後モータジェネレータ2の駆動源であるバッテリが設定したクルーズ時SOC停止判定値に充電されるまでの間、エンジン1の停止を禁止する制御を行う。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に設定車速が増加し、その設定車速を達成するまでの違和感を抑制する。
【解決手段】モータ2のみを駆動し、EVモードでクルーズ走行している状態で、運転者のスイッチ操作によって設定車速Vsが増加したら(S11、S13、S16の全てが“Yes”)、禁止フラグをFNG=1にセットしてエンジン1の始動を禁止する(S29)。このとき、モータトルク上限値TLを増加補正する(S24、S25)。車速Vが設定車速Vsまで増加し(S28の判定が“No”)、且つクルーズ要求トルクTcが始動判定閾値TONより小さければ(S36の判定が“No”)、加速期間が終了したと判断して、モータトルク上限値TLを増加補正前の通常値に復帰させる(S31)。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に一時加速してから、再びクルーズ走行に復帰する際の違和感を抑制する。
【解決手段】クルーズ要求トルクTcがアクセル要求トルクTaよりも大きい状態から(S14の判定が“No”)、アクセル要求トルクTaがクルーズ要求トルクTcよりも大きくなり、一時加速した場合には(14Sの判定が“Yes”)、禁止フラグをFNG=1にセットし(S25)、許可フラグはFOK=0にリセットする(S26)。その後、運転者のアクセル操作が解除されても(S35の判定が“Yes”)、自車速がクルーズ要求トルクTcに従ったクルーズ要求車速に戻るまでは(S29の判定が“No”)、禁止フラグがFNG=1、及び許可フラグがFOK=0の状態を保持し、一時加速後のエンジンの停止を禁止する(S37)。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動走行において、運転者に与える違和感を抑制可能とする。
【解決手段】運転者による起動操作により作動して、運転者が設定した走行状態に自動調整するための目標駆動力を算出し、エンジンへの燃料供給を制御する手段を備えたハイブリッド車両の走行制御装置であり、目標駆動力に応じた目標駆動トルクが、予め設定した負値のクルーズコーストF/C判定値未満となると、エンジンへの燃料供給を停止するF/C処理を、起動操作を検出しており、さらに、エンジンが駆動輪に駆動力を伝達し且つハイブリッド車両が減速している状態において行う。
(もっと読む)
自動車の自動変速機の制御方法
【課題】道路勾配に応じて簡単な操作で運転プログラムが割当てられる、クルーズコントロールを備えた自動車の制御方法を提供する。
【解決手段】クルーズコントロールを備えた自動車の自動変速機の制御方法は、変速機制御がクルーズコントロールのもとで外的影響、特に道路勾配に関連する別個の運転プログラムに切換えるものである。この運転プログラムは外的影響に応じて更新される。状態「設定」で別個の運転プログラムに切換えられ、状態「復帰」で運転プログラムが直ちに又は制御状態「設定」に到達した後に初めて作動されるように、変速機制御を調整することができる。
(もっと読む)
車両用走行制御装置
【課題】自動変速モードを選択したオートクルーズ制御中に手動変速モードへの切換が指令されたときに、それに応じて変速制御モードの切換とオートクルーズ制御の作動状態とを適切に連係でき、もって運転者の意志を反映した適切な車両の走行を実現できる車両用走行制御装置を提供する。
【解決手段】オートクルーズ制御中に手動変速レンジ(A/Mレンジ、+−レンジ)への切換操作がなされたとき(S24がYes)、運転者の加減速要求であると見なし、オートクルーズを解除して手動変速モードを選択することで任意の手動変速を可能とし(S26,28)、一方、オートクルーズ制御中にNレンジへの切換操作がなされたときには誤操作と見なし(S24がNo)、オートクルーズを解除して自動変速モードを選択し不適切な変速を防止する(S14,16)。
(もっと読む)
他車認識システム
【課題】周辺物検出装置で見失った監視対象車両と新たな検出車両との同一性判断。
【解決手段】自車の周辺の他車情報を受信する通信装置30と、自車の周辺の他車を検出する周辺物検出装置20と、を備え、前記他車情報の発信車両が前記周辺物検出装置20の検出範囲から離脱した際の離脱方向と、前記発信車両が前記検出範囲から離脱した後で車両が前記検出範囲に進入した際の進入方向と、に基づいて、前記検出範囲に進入した車両が前記発信車両と同一の車両か判断すること。その際、前記進入方向と前記離脱方向とが異なる場合に、前記検出範囲に進入した車両を前記発信車両とは異なる車両と判断する。
(もっと読む)
運転支援情報提示装置
【課題】減速のみでなく、渋滞を回避して車間距離を維持するための加速を促す情報を提示でき、先行車に衝突することなくかつ低燃費走行のための操作の補助となる情報を提示でき、状況の確認/操作は運転者が行うこととして、システム依存が起こりにくいシステムを提供する。
【解決手段】システムは、車速検出手段と、適正車間距離演算手段と、先行車との車間距離から適正な車間距離に対する先行車との遠近の程度を示す指標を作成する車間距離表示データ作成手段と、作成された指標を表示する車間距離表示手段と、単位時間当たりの先行車との車間距離変化量と車速の変化率に相当する車間距離変化量とを比較して車間距離の変化の段階を判定する車間距離変化段階判定手段と、車間距離の変化段階を表示する車間距離変化段階表示手段とを備える。
(もっと読む)
1 - 20 / 223
[ Back to top ]