
Fターム[3D244AC28]の内容
定速走行制御 (7,912) | 入力信号 (2,923) | 車両の状態に関するもの (1,907) | 加減速度 (113)
Fターム[3D244AC28]に分類される特許
101 - 113 / 113
乗員保護システム、及び乗員保護装置
【課題】乗員、特に子供の安全性を向上させるための乗員保護システムを提供すること
。
【解決手段】車両の乗員の安全性を図るための乗員保護システムにおいて、乗員が大人
であるか子供であるかを判別する大人子供判別手段と、乗員の位置を検出する乗員位置検
出手段と、大人子供判別手段による判別結果、及び乗員位置検出手段による検出結果に基
づいて得られる、子供の乗車状況に応じて、車載機器の制御を行う子供保護制御手段とを
装備する。
(もっと読む)
運転支援装置

【課題】少ない操作で安定した走行状態を実現すること。
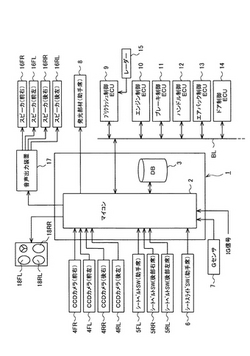
【解決手段】情報取得部11がナビゲーション装置2、道路情報収集装置31、カメラ32、速度センサ33、加速度センサ33および車両制御系50の出力から情報を収集し、理想モデル算出部12が自車両の走行の理想モデルを算出する支援処理部13は、車内通知系40を用いて運転者に対する助言を行なうと共に車両制御50を用いて自車両の走行状態が理想モデルに近づくように支援する。
(もっと読む)
走行制御装置
【課題】二輪車が追い越した先々行車を対象に走行制御をする場合でも、運転者に違和感を与えることなく走行制御できる。
【解決手段】走行制御装置は、先行車両である二輪車に追い越し傾向があり(ステップS4)、かつその二輪車が減速中の場合には(ステップS5)、予め目標車間距離L*を長くし、さらにきびきびとした追従特性にする(前記ステップS6)。また、走行制御装置は、先行車両である二輪車に追い越し傾向があり(ステップS4)、かつその二輪車が加速中の場合には(ステップS7)、予め目標車間距離L*を長くし、さらに緩やかな追従特性にする(ステップS8)。
(もっと読む)
車間距離制御装置
【課題】降雨状態に応じて、適切な目標車間距離を設定し、当該目標車間距離を維持するように自車両を走行させること。
【解決手段】自車両の車速を検出する車速センサ20、及び降雨状態(雨滴量)を検出するレインセンサ50が設けられている。レインセンサ50は、雨滴量信号をコンピュータ70に入力する。コンピュータ70は、降雨状態に応じて雨滴量信号が出力されることを利用して、同一の走行状況において、晴天時における目標車間距離より長く、降雨状態に応じて異なる、降雨時における目標車間距離を設定することができる。これにより、降雨状態に応じて、適切な目標車間距離を設定し、当該目標車間距離を維持するように自車両を走行させることができる。
(もっと読む)
車両の減速制御装置
【課題】車両の周囲が暗いなどの見通しが良くない場合であっても、運転者の感覚に合った減速制御を行うことが可能な車両の減速制御装置を提供する。
【解決手段】車両が減速制御開始許可領域405にあるときであって、運転者による減速意図が検出されたときに、車両走行環境に基づいて、減速制御を実行する車両の減速制御装置において、車両周囲の見通しを検出する手段96〜99を有し、前記車両周囲の見通しが悪いときには、前記車両周囲の見通しが良いときに比べて、前記減速制御開始許可領域が大きく設定されるとともに、前記車両走行環境に基づく減速が行われ難くされる。前記減速が行われ難くされることには、車両に付与される減速度の絶対値が小さくされ、車両が減速する割合が小さくされることが含まれる。前記車両走行環境には、車両前方のカーブ又は交差点の半径又は曲率、若しくは、車両前方の車両との位置関係が含まれる。
(もっと読む)
自動車のためのブレーキシステムをコントロールするための方法及び装置
本発明は、車両が本質的に真直ぐに走行(直進走行)する走行状態が確認されること、直進走行中の車両のブレーキの片効きが確認されること、直進走行中のブレーキの片効きが認められた場合、認められた車両のブレーキの片効きが本質的に補償されるようにブレーキコントロールが修正されることを特徴とする、一定の車両減速(a)が、ブレーキコントロールへの自動的な介入によって調節可能である車速コントロールユニットを有する自動車のための液圧ブレーキシステムをコントロールするための方法に関する。 (もっと読む)
走行制御装置
【課題】先行車に追従する場合でも、自車両が必要以上に加減速しないようにできる。
【解決手段】走行制御装置は、自車両前方に先行車と先々行車とが存在しており(ステップS1、ステップS2)、その先行車が二輪車の場合において(ステップS3)、二輪車と先々行車との車間距離L1が距離L1d(Lmb)以下であり(ステップS8)、かつ自車両と二輪車との相対速度ΔVが相対速度ΔVd以上であり(ステップS9)、かつ道路幅方向において二輪車が先々行車の側面よりも外側にいるときには(ステップS10)、自車両と先々行車との車間距離である先々行車用車間距離L3が目標車間距離L*となるような走行制御にして、先々行車に追従するようにする。
(もっと読む)
車両の減速制御装置
【課題】前車との位置関係を適正にするために、運転者の減速意思に応答して、減速制御を行なうものであって、前車が減速しているときに、適度な減速度が得られる車両の減速制御装置を提供する。
【解決手段】車両と前記車両の前方の前車との位置関係を適正にするために前記車両の運転者の減速意思が検出されたときに前記車両の減速制御を行う車両の減速制御装置であって、前記前車が減速しているときに、前記前車の減速度301に対応する値に基づいて求められた目標減速度304に基づいて、前記車両の減速制御が行われる。前記前車の減速度に対応する値は、前記前車の減速度と、前記前車と前記車両の車間距離に基づいて、決定されることができる。
(もっと読む)
車線逸脱防止装置
【課題】運転者の心的負荷を抑えつつ、走行車線からの逸脱を防止できる。
【解決手段】車線逸脱防止装置は、感圧センサ24のセンサ値からRRI値を得て、このRRIに基づいて運転者の心的負荷を計測し(ステップS3)、その計測値に基づいて運転者の心的負荷が高まっている場合、逸脱傾向の判断に用いる設定時間TTLCを大きい値に変更する(ステップS4、ステップS5)。これにより、車線逸脱防止制御の介入時期を早くする。また、運転者の心的負荷が高まっている場合、車線逸脱防止制御のために自車両に付与するヨーモーメントや減速を小さくする。
(もっと読む)
車輌用走行制御装置
【課題】自動走行制御中にマスタシリンダと車輪のホイールシリンダとの連通を遮断する制動力の制御が行われた場合に、ブレーキペダルを踏み込めないことに起因して自動走行制御を終了し得なくなることを防止する。
【解決手段】マスタシリンダと車輪のホイールシリンダとの連通を遮断しアキュムレータの高圧を使用して制動力を付与することにより車輪の過剰な加速スリップを低減するトラクション制御が行われる車輌に於いて、自動走行制御としての定速走行制御中であるか否かの判別が行われ(S20)、左右前輪の何れかについてトラクション制御が実行されているか否かの判別が行われ(S30)、車輌が走行しているか否かの判別が行われ(S40)、定速走行制御が実行され車輌が走行している状況に於いて左右前輪の何れかについてのトラクション制御が所定の時間以上継続されたときには(S50〜70)、定速走行制御が終了される(S80)。
(もっと読む)
車間距離制御装置
【課題】 本発明は、車間距離制御装置に関し、先行車両との関係で自車両が自動停車されることにより停止されたレーダによる照射を適当なタイミングで再開させることにより、車間距離制御を的確に実行させることを目的とする。
【解決手段】 車両前方にレーザ光を照射するレーダセンサを用いて先行車両との車間距離を制御するうえで、先行車両の停車に伴って自車両を停車させる車両停車制御を実行させる。車両停車制御により自車両の停車が開始された際には、レーダセンサによるレーザ光の照射を停止させる。そして、レーダセンサによるレーザ光の照射が停止された後、運転者により照射再開スイッチのオン操作が行われた際には、そのレーザ光の照射を再開させる。
(もっと読む)
車両の速度制御装置
【課題】 運転者の運転操作の負担が増大することを抑制しつつ、適切な速度制御を実行する。
【解決手段】 車速制御装置16は、自車両が先行車両に追従する追従走行状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して先行車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合等に、距離検知部25にて自車両から先行車両までの距離の検知が不可になると、設定車速判定部29から入力される先行車両の速度と所定の目標速度との比較結果に基づき、自車両速度情報抽出部24にて抽出される自車両の速度が、対象物速度情報抽出部22にて抽出される先行車両の速度または所定の目標速度の何れか小さい方と同等になるようにして速度制御を行う。
(もっと読む)
ブレーキ制御装置を有する二輪車両
ブレーキ制御装置を有する二輪車両の場合、このブレーキ制御装置ブレーキ制御装置は、車両速度又はこれから導き出された値、特に車両加速度を能動的に変更又は制限することによって運転者を能動的にアシストする手段を有する。 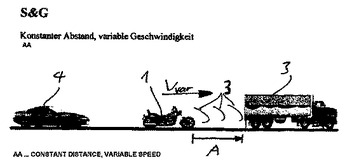 (もっと読む)
(もっと読む)
101 - 113 / 113
[ Back to top ]