
Fターム[3D244AC57]の内容
定速走行制御 (7,912) | 入力信号 (2,923) | 車両外部状況に関するもの (874) | 道路状況 (753) | 傾斜 (62)
Fターム[3D244AC57]に分類される特許
21 - 40 / 62
運転支援装置、運転支援方法および運転支援プログラム
【課題】運転者の心理的状態に対応した適切な車速の制御を行うことはできなかった。
【解決手段】自車両の前方の下り勾配の道路を走行する際に前記自車両の運転者に心理的影響を与える要因を示す要因情報を取得し、前記要因情報に基づいて前記下り勾配の道路を走行する際に前記運転者に与えられる総合的な心理的影響を取得し、前記総合的な心理的影響に応じて前記自車両に搭載された車速制御部に車速を制御させる。
(もっと読む)
車両用走行制御装置

【課題】燃費向上を優先させる運転モードにおいて運転者の負担が増大することを抑制する。
【解決手段】車両用走行制御装置10は、運転者の加速操作を検出して得られる検出結果の信号をAP入力値として出力するアクセルペダル開度センサ31と、AP入力値に基づいてAP出力値を設定し、AP出力値により内燃機関の制御をおこなう制御出力信号設定部44および制御出力信号補正部48および車両制御部49とを備え、自車両の運転状態として低燃費モードを設定する運転モード設定部45と、自車両の加速度を取得する加速度センサ32と、制限加速度を設定する制限加速度設定部46とを備え、低燃費モードが設定され、かつ、加速度が制限加速度よりも大きい場合に、加速度が制限加速度以下となるようにしてAP出力値を補正する。
(もっと読む)
車速補正システム
【課題】コスト上昇を抑制しつつ道路状況によって生ずる車両の速度の変化を補正することが可能な車速補正システムを提供する。
【解決手段】アクセル操作量と車速を測定し、アクセル操作量が一定、車速も一定のときの車速を記憶する。そして、アクセル操作量一定の状態が継続しているにもかかわらず、測定された車速が記憶されている車速に対して、一定値以上変動したときには、記憶されている車速に合わせるように車速の増減させる制御を行うことを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントロール装置において、セットスイッチのオン操作直後に、乗員に対し、走行速度が目標速度に維持されていないという違和感を与えることを抑制する。
【解決手段】車両の走行速度を検出する車速センサ6と、セットスイッチ3dと、車両走行時におけるセットスイッチ3dのオン操作時に、車速センサ6により検出されたオン操作時の走行速度を車両の目標速度として設定する目標速度設定部15aと、車速センサ6により検出される走行速度を目標速度に維持するように車両を加減速させる加減速制御部15bとを備えている車両の走行制御装置である。車両の走行速度を表示する速度計11と、該速度計11を制御する速度表示制御部17aとをさらに備えている。速度表示制御部17aは、セットスイッチ3dのオン操作時から所定時間を経過するまでの間、目標速度を車両の走行速度として速度計11に表示させる。
(もっと読む)
車間維持支援装置および車間維持支援方法
【課題】アクセル操作量が少ないときであっても、アクセルペダル反力によってドライバに的確に注意を喚起できる車間維持支援装置および車間維持支援方法を提供する。
【解決手段】自車両の前方に存在する障害物状況に基づいて第1の車間距離閾値および第2の車間距離閾値を算出し、第1の車間距離閾値および自車両と障害物との位置関係に基づいて、アクセルペダル72に発生させる反力を決定する。また、第2の車間距離閾値および自車両と障害物との位置関係に基づいて、アクセルペダル踏み込み量に対するエンジントルク発生量の関係を減少方向に補正する。エンジントルクの出力量が減少補正されると、アクセルペダル踏み込み量は通常運転者が操作する量より大きくなるため、先行車との車間距離が第1の車間距離閾値を下回った際にアクセルペダル72の操作反力を制御して運転者に適切な操作を促す場合にも、より確実に運転者に伝えることができる。
(もっと読む)
車両およびその制御方法
【課題】走行用の駆動力を滑らかに変化させる範囲をより適正なものとすると共に巡航走行の際に運転者に違和感を与えるのを抑制する。
【解決手段】車重Mが大きいほど大きくなる傾向で車速Vが大きいほど大きくなる傾向の巡航走行用アクセル開度Accjに基づいて巡航走行用範囲Rを設定し(S120)、アクセル開度Accが巡航走行用範囲R内のときには要求トルクTr*に対して緩変化処理を施して実行トルクT*を設定すると共に(S130,S150)、バッテリの入出力制限Win,Woutの範囲内で実行トルクT*が駆動軸に出力されるようエンジンと二つのモータとを制御する(S160〜S240)。これにより、巡航走行用範囲Rをより適正に設定することができると共にアクセル開度Accが巡航走行用範囲Rのときに運転者に違和感を与えるのを抑制することができる。
(もっと読む)
燃料噴射量制御システム
【課題】走行燃費向上に繋がる燃料噴射量制御と、車両の状態に対応した加速度の実現とを両立することが出来る燃料噴射量制御システムの提供。
【解決手段】オートクルーズスイッチ(9)と、車速を計測する装置(車速センサ7)と、トランスミッションのギヤ段を検出する装置(20)と、アクセル開度を計測する装置(アクセル開度センサ30)と、エンジン回転速度を計測する装置(40)と、計測された車速、トランスミッションのギヤ段、アクセル開度、エンジン回転速度、オートクルーズスイッチの操作内容が入力される制御装置(10)とを有し、該制御装置(10)は、車両の状態(例えば車速、車両積載状態、走行中の道路の勾配)に対応して噴射量制限の作動と解除を決定する機能を有する。
(もっと読む)
内燃機関の電子制御装置及び速度制御方法
【課題】スロットルバルブの開度の変更及びバルブの駆動位相の変更等に起因する速度の変動を低減して、目標速度を安定して維持することのできる内燃機関の速度制御装置を提供する。
【解決手段】スロットルバルブ駆動機構37によるスロットルバルブ36の開度を制御するスロットルバルブ制御部8Aと、可変バルブタイミング機構6によるバルブの駆動位相を制御するバルブ位相制御部8Bとを備えた内燃機関の電子制御装置8であって、前記バルブ位相制御部8Bに、前記スロットルバルブ制御部8Aによる前記スロットルバルブ36の制御開度が一定の下で目標速度を維持するように、前記バルブの駆動位相を制御する定速制御部8Cを備えている。
(もっと読む)
車両走行速度制御装置および方法
【課題】車両の操舵角、ヨーレート、および車両の前方道路の情報を予め検出し、曲線路の進入または進出の際に車両の速度を制御して車両の安全性と乗車感を向上させることが可能な、車両走行速度制御装置およびその方法の提供。
【解決手段】車両の前方道路を撮影して映像データを取得し、前記映像データからカルマンフィルターを用いて前方道路情報を抽出する前方映像センサーと、前記前方道路情報を用いて車両の走行に必要な速度を計算する制御部と、前記計算された車両の速度に応じて車両の走行動作を調節する駆動部とを含んでなる、車両走行速度制御装置。
(もっと読む)
車両用燃料供給制限装置
【課題】クルーズコントロール中における燃料供給制限を拡大する。
【解決手段】車両用燃料供給制限装置1は、自車両の走行速度と目標速度との偏差に基づいて要求スロットル開度を算出するCCコントロール部21と、CCコントロール部21により算出された要求スロットル開度に基づいてスロットルを駆動するスロットルアクチュエータ15と、要求スロットル開度が燃料カット閾値以下の場合にエンジンに対しフューエルカットを行うとともに、フューエルカット時に要求スロットル開度が燃料カット閾値よりも大きい燃料カットのオフ閾値以上となった場合にエンジンへの燃料供給を再開する燃料供給制御部23と、燃料カットのオフ閾値よりも小さな値となるスロットル開度上限値を設定するスロットル開度制限手段とを備え、要求スロットル開度が燃料カット閾値以下でフューエルカットが行われた場合には、要求スロットル開度をスロットル開度上限値以下に制限する。
(もっと読む)
車両用走行制御装置
【課題】車両の燃費を向上させつつ、運転者の走行意思を車両の走行挙動に適切に反映させる。
【解決手段】車両用走行制御装置10は、アクセルペダル開度APを検出するアクセルペダルセンサ32と、車速Vを検出する車速センサ31と、走行路の勾配Slopeを検出する勾配センサ34と、クルーズ走行の実行有無を判定するクルーズ走行判定部と、車速Vを略一定に維持する車速維持クルーズまたは駆動力を略一定に維持する駆動力維持クルーズの選択を判定するクルーズ制御切換判定部とを備え、クルーズ走行の実行状態において、走行路が降坂路であって車速Vが所定速度(例えば、最高燃費車速Vbest)よりも遅い場合、あるいは、走行路が登坂路であって車速Vが所定速度(例えば、最高燃費車速Vbest)よりも速い場合には、駆動力維持クルーズを選択する。
(もっと読む)
車両の走行制御装置
【課題】設定された自動走行車速を維持するように加減速制御を行う場合に、自動走行車速が自動走行解除車速付近の速度である場合に、走行路が登坂路である場合でも、加減速制御を無用に中止させないようにする、車両の走行制御装置を提供する。
【解決手段】自動走行車速VAが自動走行解除車速VX1付近の車速Vm1〜Vm2であるか否か判定され、車速Vが減速しているか否か判定され、自動走行車速VAの設定時に、前記両判定が肯定の場合に、自動走行解除車速VX1が所定時間Tc無効にされる。
(もっと読む)
車両走行制御装置
【課題】運転者による制動操作があった場合に、車両を停止保持することができる車両走行制御装置を提供すること。
【解決手段】車両走行制御装置1では、自動走行制御ECU7において検出された勾配において車両を停止保持することができる勾配目標駆動力Foiおよび検出された車速Vが目標車速Voとなるように算出された基準駆動力から勾配目標駆動力Foiを引いた値であるフィードバック目標駆動力Fofを算出し、エンジンECU8に出力する。エンジンECU8は、算出された勾配目標駆動力Foiおよびフィードバック目標駆動力Fofの合計である目標駆動力Foに基づいてエンジン100を制御する。運転者による制動操作を検出した場合、自動走行制御ECU7が0以下のフィードバック目標駆動力FofをエンジンECU8に出力し、エンジンECU8が勾配目標駆動力Foi未満の目標駆動力Foに基づいてエンジン100を制御する。
(もっと読む)
車両の制御装置
【課題】 駆動力及び制動力を使用した定速走行制御が加速操作に依らずに終了しても、例えば、登坂中の車両が加速せず、運転者に違和感を与えることを回避することができる車両の制御装置を提供すること。
【解決手段】 電子制御装置50は、制御スイッチ46Aが操作されること等により加速操作及び制動操作に依らずに定速走行制御を終了する時点(特定制御終了時点)以降にて、車両駆動力を特定制御終了時点の加速操作量に応じた力(0)へ減少させる。一方、電子制御装置は、駆動力と同方向ならば正の(反対方向ならば負の)値をとる力であり駆動力の大きさから制動力の大きさを減じた値を大きさとして有する車両推進力の値が特定制御終了時点の車両推進力の値以下となるように油圧回路33を用いて制動油圧を制御することにより、車両制動力を特定制御終了時点の制動操作量に応じた力(0)へ変更する。
(もっと読む)
車両の車速制御装置
【課題】車速制限制御終了後の車両の増速に際し車両の走行状況に応じて車両の増速度合を変化させることにより、車速制限制御終了後の車両の増速時に車両の乗員が増速に違和感を覚えることを防止する。
【解決手段】速度制限制御の終了条件が成立すると(ステップ320)、前後加速度Gxの定常成分に基づいて走行路の傾斜勾配Gslopeが推定され(ステップ330)、走行路の傾斜勾配Gslopeに基づいて補正係数Kgが演算され(ステップ340)、車速Vに基づいて車両の目標加速度Gxatが演算され(ステップ350)、補正係数Kgと目標加速度Gxatと図3に示されたフローチャートによる制御のサイクルタイムTcとの積と、前サイクルの車両の目標車速Vat(n-1)との和として目標車速Vatが演算され(ステップ360)、車速Vが目標車速Vatになるよう各車輪の制駆動力が制御される(ステップ370)。
(もっと読む)
車両の速度制御システム、及び速度制御方法
【課題】車両の自動速度制御において、道路勾配及び車両質量の両者に配慮した速度制御を行う。
【解決手段】車両の速度制御システムは、車両に加わる力であって車両の安定走行が可能とされる力の限界である限界値を記憶する限界値記憶手段と、道路勾配を算出する勾配算出手段と、車両質量を算出する質量算出手段と、前記道路勾配と前記車両質量と前記限界値とを用いて、車両速度を決定する車両速度決定手段とを備える。
(もっと読む)
車両およびその制御方法
【課題】定速走行指示がなされたときにより適正な制御を行なう。
【解決手段】モータからの動力を用いて走行する電気自動車において、定速走行が指示されたときに(ステップS110)、要求トルクTd*が負のトルクであると共に車両の状態がクリープトルク出力領域にあるときには(ステップS160,S200)、モータから出力するクリープトルクを徐減させて値0にすると共に(ステップS230〜S290)駆動輪に要求トルクTd*に基づく制動力を作用させる(ステップS300,S310)。こうした制御によりモータから駆動方向のトルク(クリープトルク)を出力する一方で駆動輪に制動力を作用させるものに比して、より適正な制御を行なうことができ、エネルギ効率の向上を図ることができる。
(もっと読む)
車両用走行制御装置
【課題】カーブにおいてドライバの運転感覚に合った車速制御を行う車両用走行制御装置を提供することを課題とする。
【解決手段】車両の車速制御を行う車両用走行制御装置であって、走行路がカーブであるか否か検出するカーブ検出手段と、カーブ検出手段で検出したカーブにおける入口側で減速制御を行う減速制御手段と、カーブ検出手段で検出したカーブにおける出口側で加速制御を行う加速制御手段とを備え、カーブ検出手段で検出したカーブにおける道路環境情報(道路種別など)及び/又は自車情報(燃料残量など)に基づいて目標加速度及び/又は目標減速度を設定することを特徴とする。
(もっと読む)
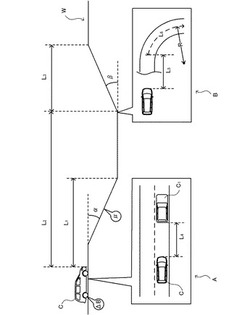
レーダシステム、物標検知プログラム、及び物標検知方法
【課題】検知される物標に重み付けをする優先検知範囲を操舵角に基づいて設定するレーダシステムにおいて、かかるレーダシステムを搭載した車両が左右方向に傾斜した直線道路を走行する際に、実際の進行路前方の先行車両を的確に検知する。
【解決手段】
自車両の操舵角に対応する進行路のカーブ半径を求め、自車両が走行する走行路面の左右方向の傾斜角に応じて異なる補正量により前記カーブ半径の値を増加させる補正を行うカーブ半径算出手段と、前記補正されたカーブ半径に対応する進行路前方の物標との相対距離または相対速度をレーダ波の反射波信号に基づいて検知する物標検知手段とを有するレーダシステムにより、補正されたカーブ半径に対応する自車両の進行路を求める。よって、傾斜角の増大にともないカーブ半径が減少しても、減少したカーブ半径を補正でき、実際の進行路前方の物標を検知することができる。
(もっと読む)
運転支援装置
【課題】自車両周囲の車両交通流に悪影響を与えないようにしつつ、経済運転を実現させる運転支援装置を提供すること。
【解決手段】車両に搭載され、経済運転実現のために運転者による運転操作を支援する運転支援装置に、自車両が一時停止しようとしている目標停止位置を検出する停止位置検出手段と、エンジンブレーキを使用することにより、摩擦ブレーキを用いずに自車両を上記目標停止位置で一時停止させようとするときに、燃料カットオフ制御が開始されるべき位置を算出する開始位置算出手段と、自車両後方を走行する後続車及びその後続車との車間距離を検出する後続車検出手段とを設け、開始位置算出手段が、後続車検出手段により後続車が検出されたとき、自車両が停止するまで上記車間距離が所定距離以上に保たれるように、算出した燃料カットオフ制御開始位置を修正するように構成する。
(もっと読む)
21 - 40 / 62
[ Back to top ]