
Fターム[3D246EA03]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ系以外の制御系との関連制御 (2,202) | 推進装置 (1,150) | エンジン (780) | エンジンブレーキ (99)
Fターム[3D246EA03]に分類される特許
1 - 20 / 99
車両の制御装置
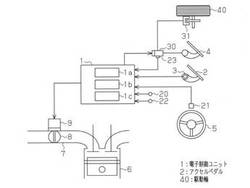
【課題】アクセルの誤操作を適切に判定することにより、駆動力低下によるドライバビリティの悪化を抑えることのできる車両の制御装置を提供する。
【解決手段】電子制御ユニット1は、駆動輪40の駆動力を低下させる駆動力低下制御を実行する。そして電子制御ユニット1は、車両進行方向における障害物の接近を検出してから所定の判定時間が経過した後にアクセルペダル2が操作されたときには、駆動力低下制御として駆動輪40の制動を行う。
(もっと読む)
車両減速度制御装置

【課題】フェード現象やヴェイパーロック現象を抑制しつつ、ドライバに対して減速すべき状況であることを知らせることができる車両減速度制御装置を提供すること。
【解決手段】ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、エンジンブレーキを用いた減速度とを発生させることができる車両に搭載される車両減速度制御装置100であって、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定し(S10,S11)、減速を開始するタイミングであると判定された場合に、エンジンブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う(S13)。
(もっと読む)
車両のブレーキングを制御するための方法
【課題】ブレーキペダルの動作の妨害といったようなブレーキング異常に対処すること。
【解決手段】モータ車両100のブレーキングを制御するための方法であって、ブレーキングシステム140の油圧に関連した情報を受領し;ブレーキペダル表面190に対して印加された圧力に関連した情報を受領し;ブレーキングシステムの油圧とブレーキペダル表面圧力との間の、測定されたブレーキング関係を決定し;所定のブレーキング関係を取得し;測定されたブレーキング関係と所定のブレーキング関係とを比較し;測定されたブレーキング関係が所定のブレーキング関係とは相違するものである場合には、モータ車両の速度を低減し得るよう構成されたブレーキング補助手段を起動する。
(もっと読む)
車両の制動制御装置
【課題】エンジンブレーキが発生する場合においても、ガタ詰めが必要なモードにおいては、ガタ詰めが適切に機能する制動制御装置等を提供する。
【解決手段】自車両に備わる制動制御装置は、本制動の前に、自車両のディスクロータとブレーキパッドとの隙間を詰める事前制動を実行する事前制動部と、自車両の駆動力に基づいて、事前制動部による制動力を算出する算出部と、エンジンブレーキにより自車両の制動を実行するエンジンブレーキ制動部と、事前制動部による事前制動が必要であるか否かを判定する判定部と、事前制動部による制動を制御する制御部とを備え、制御部は、エンジンブレーキ制動部による制動力が、算出部によって算出された事前制動部による制動力よりも大きく、かつ、判定部による判定結果が肯定である場合に、事前制動部による制動を実行する。
(もっと読む)
先行車追従走行装置及び運転支援システム
【課題】先行車追従走行を行うものにおいて、燃費の悪化をより抑制することを可能にする。
【解決手段】先行車の速度と、車車間通信で取得した先行車と同一道路上の先行車の進行方向前方に位置する先行車前方車の速度情報とをもとに、当該先行車前方車の速度が先行車の速度よりも所定値以上小さいか否かを判定する。そして、肯定判定した場合であって、且つ、自車の速度が先行車の速度以下の場合には、先行車追従制御を中断し、自車の速度を維持することで加速を抑制する。
(もっと読む)
車両の走行制御装置
【課題】制動条件の異なる2以上の制御モードを協調して車両を走行制御する際に、制御モードの切替を適切に行うことを可能とする。
【解決手段】互いに異なる制動条件で車両を制駆動制御する2以上の制御モードを協調制御して、走行状態に基づき採用する制御モードを切り替える車両の走行制御装置4である。走行路の勾配の状態に応じて、カーブ減速制御モードから一定速制御モードへの切替の閾値を変更する。具体的には、下り勾配であるほど、上記閾値を高くする。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段2と、自車両の位置を取得する自車位置取得手段3と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段4と、を有し、車両運動制御演算手段4は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算し、前記前後加速度指令値は、自車両前方のカーブ走行時に発生するであろう最大横加速度推定値、自車両前方の道路勾配、ドライバのペダル操作、旋回方向のうちの少なくともいずれか一つに基づいて変化する。
(もっと読む)
車両用減速度制御装置、車両用減速度制御方法
【課題】運転者のブレーキ操作を支援し、操作負担を軽減する。
【解決手段】車両の駆動源を被動側から駆動される状態にして車両に減速度を与えるエンジンブレーキを備え、運転者がブレーキ操作量を保持したときに、エンジンブレーキによる減速度をライズアップ率Rrで増加させる。そして、減速度をライズアップ率Rrで増加させてから予め定められた時間が経過したら、この時点の減速度から減速度をライズアップ率Rrよりも小さなビルドアップ率Rbで増加させる。また、運転者がブレーキ操作量を増減させている、つまりブレーキ操作量を保持していないときには、エンジンブレーキによる減速度を保持させる。また、エンジンブレーキによる減速度を上限値GLIM以下に制限する。
(もっと読む)
先行車追従走行装置
【課題】燃費の悪化が抑制でき、且つ、先行車に対する追従性も良好な先行車追従走行装置を提供する。
【解決手段】先行車追従制御において、摩擦ブレーキ開始閾値式(L1)、エンジンブレーキ開始閾値式(L2)、加速制御終了閾値式(L3)を用いて、摩擦ブレーキ開始閾値、エンジンブレーキ開始閾値、加速制御終了閾値を逐次算出する。そして、エンジンブレーキ開始閾値と加速制御終了閾値の間を等速領域とし、KdB_cの現在値が等速領域にあれば等速制御を行う。等速制御を行うことができる結果、加減速の頻度が低下するので、燃費の悪化が抑制できる。また、減速の頻度が少なくなることにより、割り込み車が加速した場合や、先行車が減速後、再加速した場合に、先行車に追従するための加速が少なくて済むので、追従性も良好となる。
(もっと読む)
車両制御装置
【課題】走行中の車両が障害物に衝突する可能性がある場合に、シフトダウンによるエンジンブレーキの制動効果を実効的なものとすることができる車両制御装置の提供。
【解決手段】変速機を備えた車両の走行状態を制御する車両制御装置であって、車両周辺の障害物を検出する障害物検出手段と、上記障害物検出手段により検出された障害物と上記車両とが衝突する可能性を判定する衝突可能性判定手段と、上記衝突可能性判定手段による判定結果に応じて上記変速機の変速比を変更する第1の衝突回避手段と、上記衝突可能性判定手段による判定結果に応じてドライバに対する警報またはブレーキ装置の制御による自動的な制動の少なくともいずれか一方の衝突回避動作を上記車両に行わせる第2の衝突回避手段とを備え、上記第1の衝突回避手段による変速比の変更は、上記第2の衝突回避手段による衝突回避動作より前のタイミングで行われることを特徴とする。
(もっと読む)
車両の運転支援制御装置
【課題】降坂時定速走行制御による定速走行を、たとえエンジンブレーキでは制動力が不足するような領域でも精度良く安定して行うことができ、ドライバに対して的確な路面情報を伝えつつ、変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を実行する際は、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定車速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、制動力が不足すると判定した場合は、Nレンジ位置にさせると共に、車輪の接地荷重配分に応じて不足する制動力を設定する。また、制動力が不足すると判定した場合には、トランスファクラッチトルクTlsdを略0に近い値に設定させ、制動力が十分であると判定した場合には車輪の接地荷重配分に応じて設定させる。
(もっと読む)
車両用運転支援装置
【課題】勾配路での変速機のダウンシフトが行われない場合にも、ブレーキの自動介入時間を増加させることなく良好な車速制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ACCの実行中にブレーキの自動介入制御が設定時間t0以上継続したことを判定したとき、目標加速度aを予め設定された負側の値Bまで変化させ、変化させた目標加速度aを、基本目標加速度a0が正側の設定値a0thを越えるまでの間維持する割込制御を行う。
(もっと読む)
クルーズコントロールシステム
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
車両の運転支援制御装置
【課題】ドライバに対して的確なロードインフォメーションを伝達しつつ、降坂時定速走行制御を変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を選択した際には、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、降板走行を設定速Vhdcで走行するのに制動力が不足するか否かを判定し、制動力が不足すると判定した場合には、不足する前後輪の制動力Fbrkf、Fbrkrを、車輪の接地荷重配分に応じて設定し、ブレーキ制御部32に出力する。また、制動力が不足する場合と制動力が十分な場合とで前後軸間の駆動力配分を車輪の接地荷重配分に応じて略同一になるように設定し、前後駆動力配分制御部31に出力する。
(もっと読む)
車両用運転支援装置
【課題】特別なセンサを装備することなく、自動ブレーキが作動した際の自車両の停止前後に発生するピッチング振動を抑制し、良好な乗り心地性を得ることができるようにする。
【解決手段】始動ブレーキ作動後の減速度Gwに基づいて減圧開始距離Pdを求め(S9)、自車両と前方障害物との間の障害物間距離Lが、前方障害物に対する停止目標距離Lsに減圧開始距離Pdを加算した距離に達したとき、ブレーキ圧の減圧を開始し(S11)、自車両の停止前後で発生するピッチング振動を抑制する。そして、障害物間距離Lが停止目標距離Lsの手前の停止ブレーキ開始距離pに達したとき、ブレーキ圧を加圧させて(S13)、自車両を停止させる。
(もっと読む)
車両用減速度制御装置
【課題】運転者のブレーキ操作を支援し、操作負担を軽減する。
【解決手段】車両の駆動源を被動側から駆動される状態にして車両に減速度を与えるエンジンブレーキを備え、運転者がブレーキ操作量を保持したときに、エンジンブレーキによる減速度をライズアップ率Rrで増加させる。そして、減速度をライズアップ率Rrで増加させてから予め定められた時間が経過したら、この時点の減速度から減速度をライズアップ率Rrよりも小さなビルドアップ率Rbで増加させる。また、運転者がブレーキ操作量を増減させている、つまりブレーキ操作量を保持していないときには、エンジンブレーキによる減速度を保持させる。
(もっと読む)
回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラム
【課題】電動機の回生トルクを制動力として利用する際のドライバビリティを向上させること。
【解決手段】電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する減速度比較部32と、電動機が最大の回生トルクを発生しているにも係わらず減速度比較部32の比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する回生制御部30と、を有するハイブリッド自動車を構成する。
(もっと読む)
車両用制動装置
【課題】回生制動による制動力を状況に応じて変えるとともに、車両の運動エネルギを好適に電気エネルギに変換できる車両用制動装置を提供することを課題とする。
【解決手段】走行用モータ3の減速比を変更可能な変速機4aを有するハイブリッド車両HVに備わり、ブレーキペダルの操作量に応じて設定される目標制動力に基づいてブレーキアシスト制御する車両用制動装置1とする。そして、走行用モータ3を回生制御して回生制動力を発生する回生ブレーキと、油圧で作動するブレーキ作動部Brで摩擦制動力を発生する油圧ブレーキと、を備え、ブレーキアシスト制御の開始条件が成立したとき、車両用制動装置1は、回生制動力が低下するように減速比を設定した後で減速比の変更を停止し、回生制動力と摩擦制動力で目標制動力を発生することを特徴とする。
(もっと読む)
車両速度制御装置および車両速度制御方法
【課題】 ドライバの速度制御への介入が容易であり、利便性の向上を図ることができる車両速度制御装置および車両速度制御方法を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、ドライバのブレーキ操作状態を検出するマスタシリンダ圧センサ104と、自車両と先行車両との距離を検出するカメラ107と、自車両の走行速度を制御するエンジン112およびブレーキ装置(ブレーキ液圧ユニット101,ブレーキECU102)と、カメラ107により検出された先行車との距離Dcaが速度制御許可範囲内で、かつ、アクセル開度センサ110とマスタシリンダ圧センサ104により検出された操作状態があらかじめ設定された所定の状態の場合、自車両と先行車との相対関係を維持するように速度制御部(エンジン112およびブレーキ装置)を作動させるブレーキECU102と、を備えた。
(もっと読む)
制動制御装置
【課題】衝突形態に応じて最適な時間に亘って自動的に制動機構を作動させる。
【解決手段】自車両の衝突を検出する衝突検知センサ2a〜2dと、自車両の車速を検出する車速センサ4とを備え、制駆動力コントロールユニット12は、衝突検知センサ2a〜2dにより自車両の衝突が検出された場合に、当該衝突を検出した後に車速センサ4により検出された車速に基づいて、自動的に制動力を発生させる時間である自動制動時間を制御して、ブレーキ制御装置6を作動させる。
(もっと読む)
1 - 20 / 99
[ Back to top ]