
Fターム[3D246GA25]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−解決課題 (3,487) | 制御精度向上 (516) | 検出、推定精度の向上 (193)
Fターム[3D246GA25]の下位に属するFターム
零点調整 (7)
Fターム[3D246GA25]に分類される特許
1 - 20 / 186
車両用ブレーキ装置
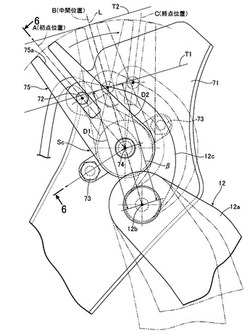
【課題】 ブレーキペダルのストロークと、ストロークセンサの出力との線形性およびゲインを高める。
【解決手段】 ブレーキペダル12のストロークを検出するストロークセンサScが、ペダル回動軸12bとは軸心を異にして平行に配置されるセンサ回動軸74と、ペダルアーム12cの回動によりセンサ回動軸74まわりに回動するセンサアーム75とを備えており、ストロークセンサScの分解能を他の領域よりも高く設定する領域にあるときに、ペダルアーム12cの回動軌跡の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になるようにしたので、ストロークセンサScに高い検出精度が要求とされるときに、ストロークセンサScの出力特性の線形性を高めて誤差の発生を最小限に抑えることができるだけでなく、ストロークセンサScの取り付け位置にバラツキがあっても、出力特性の変化を最小限に抑えてブレーキフィールを高めることができる。
(もっと読む)
車両用制動力制御装置

【課題】ブレーキペダルのペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、ストロークセンサ18と、マスターシリンダ圧力センサ19と、倍力装置指令値演算手段61と、平滑化処理手段63と、を備える。ストロークセンサ18で検出されたペダルストローク量と、マスターシリンダ圧力センサ19で検出されたマスターシリンダ圧力と、から倍力装置指令値演算手段61によって倍力装置指令値が演算されて、演算された倍力装置指令値に、平滑化処理手段63によって平滑化処理を施して、電動ブースタ2の動作量とする。
(もっと読む)
電動倍力装置
【課題】製造効率の向上が可能な電動倍力装置を提供する。
【解決手段】電動モータ6の駆動によって、軸部材20(ピストン推進部材)が、非制動時の初期位置から液圧発生位置の直前の位置まで移動した時点で、軸部材20のフランジ21が戻しばね24に当接することで軸部材20に所定の抵抗を付与する。この所定の抵抗を電動モータ6の電流値によって検出することで、マスタシリンダ3のピストン4が液圧発生位置に到達することを検出できる。これにより、電動モータ6の回転変位を検出するためのレゾルバ等の回転位置検出装置が不要になるので、電動倍力装置の製造効率を向上させることができる。
(もっと読む)
ブレーキ装置
【課題】車両の駐車場所がスプリットμ路面であるか否かを判定できるブレーキ装置を提供する。
【解決手段】ディスクブレーキ21を構成する取付部材に歪センサ37を設ける。歪センサ37は、取付部材の歪に基づいて、ディスクブレーキ21のブレーキ力を検出する。駐車ブレーキ用コントローラ38は、駐車ブレーキの作動時に、左側の後輪3のディスクブレーキ21のブレーキ力と左側の後輪3のディスクブレーキ21のブレーキ力とを比較し、これら左,右のブレーキ力Bに差がある場合に、左側の後輪3と右側の後輪3とがスプリットμ路面の勾配路に駐車されていると判定する。
(もっと読む)
悪路判定装置
【課題】容易且つ正確に車両が悪路を走行しているか否かを判定する。
【解決手段】悪路判定装置は、車両におけるブレーキペダルの操作変化率を検出する変化率検出手段と、ブレーキペダルの操作変化率の正負反転回数を検出する反転回数検出手段と、ブレーキペダルの操作変化率の正負反転回数が所定値以上になった場合に、車両が悪路を走行していると判定する判定手段とを備える。
(もっと読む)
車両停止判定装置
【課題】 精度良く車両停止状態を判断可能な車両停止判定装置を提供すること。
【解決手段】 本発明の車両停止判定装置にあっては、運転者の操作以外によってエンジンの停止・再始動が行われる動力源と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、前記車輪速検出手段により検出された従動輪車輪速が回転停止を第1所定時間以上継続し、かつ、駆動輪車輪速が回転停止を前記第1所定時間より長い第2所定時間以上継続したときは車両停止と判定する車両停止判定手段と、を備えた。
(もっと読む)
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
車両操作支援装置
【課題】障害物の移動状態に応じた車両の操作支援を実行可能な車両操作支援装置を提供すること。
【解決手段】自車に対する障害物を検知し、その検知結果を用いて少なくとも障害物と自車との相対速度及び相対距離を検出する障害物検知手段M1を備え、検出の結果に基づいて障害物に対する回避支援を行う車両操作支援装置Uにおいて、自車速度と相対速度と相対距離とに基づいて、障害物が回避支援の対象となるか否かを判定する回避支援対象判定手段M2を備え、相対速度が自車速度と略等しい場合に、障害物を、少なくとも車両進行方向に移動していない停止障害物であると判定し、相対速度が自車速度と異なる場合にて、相対速度と相対距離とに基づいて算出した衝突余裕時間の単位時間当たりの減少量が所定の減少量以上の場合は、障害物を急接近障害物と判定し、所定の減少量未満の場合は、障害物をその他の障害物と判定する。
(もっと読む)
前後加速度推定装置
【課題】車両の前後加速度又は路面摩擦係数若しくは路面状態の推定精度を向上させることが可能な前後加速度推定装置を提供する。
【解決手段】前後加速度推定装置22は、加速操作又は減速操作の開始時点における前後加速度センサ42の検出値と、その後の前後加速度センサ42の検出値との差を、車両10の前後加速度の推定値として算出する加速度推定手段110を有する。
(もっと読む)
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
路面状態推定方法、及び路面状態推定装置
【課題】バネ下前後加速度と車輪速のデータとを用いて、走行中の路面の状態を精度よく推定する方法とその装置を提供する。
【解決手段】ナックル21に取付けられた加速度センサー11によりバネ下前後加速度を検出するとともに車輪速を検出して車輪速の変化量を算出した後、車輪速の変化量の変動幅とバネ下前後加速度の変動幅とを算出し、車輪速の変化量の変動幅とバネ下前後加速度の変動幅との関係から路面が凹凸のある路面であるか否かを判定し、凹凸のある路面である場合には、バネ下前後加速度を周波数分析して得られた周波数スペクトルの200Hz〜230Hz帯域内におけるピーク周波数を抽出し、このピーク周波数と、車輪速と、予め求めておいたピーク周波数と車輪速との関係を示す周波数判定式とを用いて凹凸のある路面が滑り易い路面であるか否かを推定するようにした。
(もっと読む)
車両状態検出装置
【課題】車両に設置されたカメラ20で撮像された画像データに基づいて、自車両の状態を検出する車両状態検出装置であって、その検出精度を向上させることを目的とする。
【解決手段】制御装置10(CPU11)は、カメラ20で撮像された複数の画像データを取得して、この複数の画像データの夫々において特徴点を抽出し、時間的に連続する画像データにおいて、特徴点の位置を追跡処理することによって複数のオプティカルフローを導出する(S10〜S30)。そして、導出された複数のオプティカルフローにおいて、方向と大きさの両方が同じであるオプティカルフロー同士を一つのグループに分類するとともに、オプティカルフローが最も多く含まれるグループのオプティカルフローを、自車両に対応する自車オプティカルフローとして選択し、選択された自車オプティカルフローに基づいて自車両の状態を検出する(S50〜S70)。
(もっと読む)
磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置
【課題】磁気式回転角検出装置に外乱磁界が作用して回転角検出誤差を生じる状態を的確に判定すること。
【解決手段】回転軸52の回転に伴って回転変位する磁石54と、磁石54の回転面に平行な面上に互いに直交方向する軸線方向に沿って配置され、90度の回転位相をもって磁石54の磁気強度を検出する2個の磁気検出素子58、・60と、磁気検出素子58、60により検出される磁気強度を合成した合成ベクトルに基づいて回転軸52の回転角を算出する回転角算出部62とを備えた磁気式回転角検出装置において、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部64を設ける。
(もっと読む)
ブレーキ制御装置
【課題】長時間モータ駆動を行わなくても、モータ空回り判定を行うことが可能なブレーキ制御装置を提供する。
【解決手段】モータ空回り判定時に、モータ60を2回駆動し、1回目には第1時間モータ駆動を行い、2回目には第1時間よりも長い第2時間モータ駆動を行う。そして、1回目と2回目それぞれで、モータ60停止後のモータ60による発電電圧(MT)が所定の閾電圧に低下するまでの第1、第2電圧低下時間MT1、MT2の差が閾時間以上であるか否かを判定することで、モータ空回り判定を行う。このように、1回目と2回目のモータ駆動時間を変えることにより、極低温時のように、ブレーキ液やモータ60の回転軸に塗布されているグリスなどの粘度が高くなったとしても、第1、第2電圧低下時間MT1、MT2の差に基づいて、モータ空回り判定が行える。したがって、長時間モータ駆動を行わなくてもモータ空回り判定を行うことができる。
(もっと読む)
車両用ブレーキ制御装置
【課題】EPBによる制動力によって車両のずり下がりを防止しつつ、過剰な制動力を発生させなくても済むようにする。
【解決手段】車速が0になって車両が停止したときに、ピッチングによりGセンサ21のGセンサ値が変動しても、その変動波形の振幅のーク値に沿って目標制動力が更新されるようにしている。これにより、Gセンサ値に基づいて設定される目標制動力をより路面勾配に対応する値に近づけることが可能となる。このため、EPBによる制動力によって車両のずり下がりを防止しつつ、過剰な制動力を発生させなくても済むようにできる。
(もっと読む)
液圧ブレーキシステム
【課題】複数のブレーキシリンダが接続された共通通路を備えた液圧ブレーキシステムにおいて、複数のブレーキシリンダの液圧が個別に制御されるとともに、共通通路の液圧が制御される場合に、共通通路の液圧制御において制御ハンチングを抑制する。
【解決手段】第1フィルタ処理部250、第2フィルタ処理部252は、共通通路液圧センサ226の検出値Prawの平均値を求め、フィルタ値として出力する。第1フィルタ処理部250において用いられる検出値の個数Nは、第2フィルタ処理部252において用いられる個数NABSより少なく、第2フィルタ値PvalABSは第1フィルタ値PvalNより平滑化のレベルが高い。並行共通通路液圧制御部260においては、第2フィルタ値PvalABSに基づいて共通通路の液圧制御が行われる。その結果、第1フィルタ値PvalNに基づく場合に比較して、制御ハンチングを抑制することができる。
(もっと読む)
鞍乗り型車両のホイールアセンブリ構造
【課題】ディスクプレートとパルサーリングとを共締めでリジッドマウントする場合にも、車輪速センサとパルサーリングの被検出部とが安定的な位置関係を維持することが可能な鞍乗り型車両のホイールアセンブリ構造を提供する。
【解決手段】パルサーリング26は、円環状の被検出部46の内縁から軸方向内側に折れ曲がるリブ部49を有し、該リブ部49がパルサーリング26の内縁全周にわたって設けられることで補強管部50が形成され、該補強管部50の軸方向の内側縁部から径方向内側に折れ曲がるフランジ部51が設けられ、当該フランジ部51が補強管部50の全周にわたって設けられることで補強円環部52が形成される。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う可変フィルタ処理部814、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809、建設車両の変速機の状態を判定する変速状態判定部808を備え、時定数変更部809は、ロックアップの解除指令が出力されてから一定時間経過していない状態にあると判定されたら、可変フィルタ処理部814の時定数を変更するロックアップ切換時定数変更部813を備える。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う時定数可変の可変フィルタ処理部814と、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809と、建設車両の変速機の状態を判定する変速状態判定部808とを備え、時定数変更部809は、変速状態判定部808で変速機が変速中であると判定されると、可変フィルタ処理部814の時定数を現在よりも大きくする変速状態時定数変更部812を備える。
(もっと読む)
制動力制御装置
【課題】マスタシリンダ圧センサを必要としない制動力制御装置を提供する。
【解決手段】マスタカット弁41は、磁性体(プランジャ)101と、コイル102と、スプリング103と、を備える。磁性体101は、第1液圧配管38と連結通路43との液圧差に応じた差圧作用力が開弁する方向に作用される。コイル102は、磁性体101が動くことにより、誘導起電力が発生する。誘導起電力は液圧が変化した際、特に運転者がブレーキペダル31を操作した際、コイル102に電磁誘導により電流が流れるようになっている。ブレーキペダル31を操作したことにより発生した電流をブレーキ液圧に換算して制動装置に導入する。これより、ブレーキペダル31によるブレーキ液圧を制動力制御装置に導入することができる。
(もっと読む)
1 - 20 / 186
[ Back to top ]