
Fターム[3D246HC01]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | マップによるもの (251)
Fターム[3D246HC01]に分類される特許
241 - 251 / 251
車両の制振制御装置

【課題】 車両の制動制御装置にて得られる車輪のスリップ状態を示す車輪スリップ状態量を利用する駆動出力制御による車両のピッチ・バウンス振動制振制御装置に於いて、制動制御装置が作動可能でないときに、不適切な制振制御が実行されることを回避すること。
【解決手段】 本発明の車両の制振制御装置は、制動制御装置から車輪スリップ状態量を取得して、車輪スリップ状態量が表すスリップの程度に基づいて駆動トルクの制御量を補正するが、制動制御装置が作動可能な状態でないときには、制動制御装置が作動可能な状態のときに比して駆動トルクの制御量を低減することを特徴とする。
(もっと読む)
自動走行車両および追尾システム

【課題】安定した隊列走行を実現すること。
【解決手段】先導車両に追従して自動走行する自動走行車両であって、前方車両との車間距離に応じて走行速度を制御する制御装置を具備する自動走行車両を提供する。
(もっと読む)
車両用走行制御装置
【課題】カーブにおいてドライバの運転感覚に合った車速制御を行う車両用走行制御装置を提供することを課題とする。
【解決手段】車両の車速制御を行う車両用走行制御装置であって、走行路がカーブであるか否か検出するカーブ検出手段と、カーブ検出手段で検出したカーブにおける入口側で減速制御を行う減速制御手段と、カーブ検出手段で検出したカーブにおける出口側で加速制御を行う加速制御手段とを備え、カーブ検出手段で検出したカーブにおける道路環境情報(道路種別など)及び/又は自車情報(燃料残量など)に基づいて目標加速度及び/又は目標減速度を設定することを特徴とする。
(もっと読む)
車輪接地荷重の変化率に応じて制駆動力制御態様を変更する車輌
【課題】車輪に作用する制動力や駆動力を一旦低減した後漸増する制駆動力制御は多分に動的な制御であり、その態様は車輪接地荷重の変化率によってその最適性が異なることに着目してABS制御やTRC制御を更に改良する。
【解決手段】車輪と路面の間の滑りが増大したとき該滑りを低減する制駆動力制御を行う車輌に於いて、制駆動力制御開始点、制動力または駆動力の一時低減の速度や目標値、一時低減後の回復目標値等の制駆動力制御態様を車輪接地荷重の変化率に応じて変更する。
(もっと読む)
車輌の横転の虞れ判定装置
【課題】操舵角及び操舵角速度に基づいて車輌の横転の虞れを判定することにより、従来に比して正確に且つ確実に車輌の横転の虞れを判定する。
【解決手段】車輌が所定値Vo以上の車速にて走行する状況に於いて(S320)、切り増し方向の操舵角速度がその基準値θd3以上である状況が所定の時間T3以上継続し、操舵角θの大きさがその基準値θ3以上であり且つ車速Vがその基準値V3以上であり且つ車輌の横加速度Gyの大きさがその基準値Gy3以上であるときに(S340〜370)緊急回避操舵状態であると判定され、車輌が横転する虞れがあると判定される(S360)。
【選択図】図4  (もっと読む)
(もっと読む)
車両用電源制御装置
【課題】本発明は、限りある供給可能電力を有効利用することができる、車両用電源制御装置の提供を目的とする。
【解決手段】車両に搭載される複数の電気負荷(電動パワステ1や電動スタビ2など)と、これらの電気負荷に対して電力を供給するバッテリ10やオルタネータ12とを備え、ドライバーの視線を検出する視線検出装置20や道路情報を有するナビゲーション装置21などによって取得可能なこれらの電気負荷の作動を予知させる予兆情報に基づいて、これらの電気負荷の作動に伴う電力需要を推定し、その推定結果に応じてこれらの電気負荷のそれぞれに対するバッテリ10等からの電力供給を調整することを特徴とする、車両用電源制御装置。
(もっと読む)
車両ブレーキシステムのブレーキ係数測定及び予測を行う方法及び装置
本発明は、複数のホイールアクスル(4,5、6、7)を有する牽引車両(2)及びトレーラ(3)を備える車両(1)のブレーキシステムのブレーキ係数(Bf)測定及び予測を行う方法において、該方法は、少なくとも第1ホイールアクスル(4)及び第2ホイールアクスル(5)が関与する制御ブレーキ操作を開始すること、及び前記牽引車両(2)及び前記トレーラ(3)間のブレーキバランスを得るために、制動機能部を備える制御ユニット(13)によって前記第1ホイールアクスル(4)及び前記第2ホイールアクスル(5)についての前記ブレーキ係数(B11;B12)を示す値を得ることを含む方法である。本発明によれば、前記方法は、前記車両(1)の減速が要求されると、前記第1ホイールアクスル(4)を強制的に制動するステップ(17)と、前記第1ホイールアクスル(4)についてブレーキ圧力(Pcy11)及びブレーキトルク(Tbrake1)を決定することによって前記第1ホイールアクスル(4)についてブレーキ係数(B11)を予測するステップ(18)と、その後に前記第2ホイールアクスル(5)を強制的に制動するための移行段階を設けるステップ(19)と、前記第2ホイールアクスル(5)についてブレーキ圧力(Pcy11)及びブレーキトルク(Tbrake2)を決定することにより、前記第2ホイールアクスル(5)についてのブレーキ係数(B12)を予測するステップ(20)とをさらに含む。本発明は、車両ブレーキシステムのブレーキ係数を測定し予測する装置に関する。 (もっと読む)
減速制御装置
【課題】ドライバに違和感を与えることなく効果的に減速制御を行う。
【解決手段】自車両の走行速度Vが、安全走行可能な横加速度制限値Yg*に応じて設定される目標車速V*よりも大きく減速する必要がある場合には、走行速度Vと目標車速V*とに応じた目標減速度Xg*を実現し得る目標制動流体圧P*を算出し、これに応じて制動流体圧を発生させて減速制御を行うが、このとき、自車両が車線逸脱傾向にあることを検出した場合には(ステップS3、S4)、前記目標減速度Xg*に応じた目標制動流体圧P*をより大きくなる方向に制御する(ステップS13)。したがって、安全走行可能とするための制動力が発生させると共にさらに車線逸脱傾向を抑制するための制動力が発生されることになるから、安全走行を確保しつつ車線逸脱を抑制することができ、車両の走行状態に即して効果的に減速制御を行うことができる。
(もっと読む)
車両用ブレーキ装置
【課題】 車両制動時に、一つの配管系統における第1及び第2の車輪のブレーキ液圧を調節することにより、制動性能を向上することができる車両用ブレーキ装置を提供すること。
【解決手段】 ステップ230では、各車輪毎に車輪スリップ量Xsを算出する。ステップ250では、車輪が路面限界に近づいているか否かを、車輪スリップ量Xsが所定の基準値KXs以上であるか否かによって判断する。ステップ260では、例えば右前輪FRが路面限界に近づいていると判断されたので、第1の減圧制御弁15を連通状態にし、第1のホイールシリンダ9からブレーキ液をリザーバ17に逃がして、第1のホイールシリンダ圧を低減する。ステップ270では、ポンプ23を駆動して、リザーバ17からブレーキ液を汲み上げ、第2のホイールシリンダ圧を上昇させて、左後輪RLの制動力を上げる。
(もっと読む)
自動車に用いられるブレーキシステムを運転するための方法
電気的に制御可能なハイドロリック弁(V1〜V8)を備えた、自動車に用いられるブレーキシステム(1)を運転するための方法が記載される。ハイドロリック弁(V1〜V8)のコイルが、ブレーキシステム(1)のハイドロリックシステムに位置するハイドロリック流体を温めるために、ハイドロリック弁(V1〜V8)の無通電の切換状態を変化させる電流で少なくとも段階的に通電される。本発明によれば、ハイドロリック流体が、このハイドロリック流体の温め段階を招くハイドロリック流体温度に関連した、第1の加熱段階と、この第1の加熱段階に続く第2の加熱段階とから成る加熱分布を介して温められる。この場合、コイルは、第1の加熱段階の間、この第1の加熱段階の終了時のコイル温度が、それぞれ予め規定されたコイル温度値に相当しているように通電される。このコイル温度値は、第2の加熱段階の間、コイルの通電によって少なくとも近似的に保持される。 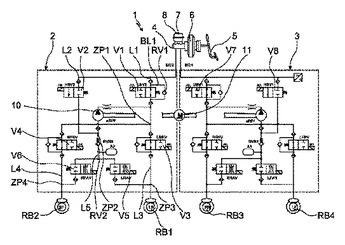 (もっと読む)
(もっと読む)
電子式パーキングブレーキの制御方法
電子式パーキングブレーキの制御方法。電子式駐車ブレーキ装置の制御ないし調整方法、並びに電子式駐車ブレーキ装置が開示される。ここでは駐車ブレーキ装置の引きつけ過程の開始時に、力−位置割り当て(61)が行われる。この力−位置値(61)に基づいて、駐車ブレーキ装置の機能および/または安全性に関する妥当化が行われる。  (もっと読む)
(もっと読む)
241 - 251 / 251
[ Back to top ]