
Fターム[3D246HC01]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | マップによるもの (251)
Fターム[3D246HC01]に分類される特許
161 - 180 / 251
車両用走行支援装置および車両用走行支援方法
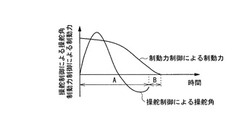
【課題】障害物との接触を回避する操舵制御を行う場合に、運転者に違和感が生じる事態を低減すること。
【解決手段】操舵回避能力が設定された閾値より低い場合に、障害物との接触回避のための操舵制御を抑制する(図10の区間B)。このため、操舵回避能力が設定閾値より低くなり、操舵制御による障害物との接触回避効果が低下した場合に、その操舵制御を抑制できる。この結果、操舵制御が行われている場合であっても、運転者が操舵操作を行った際、違和感を生じる事態を低減することができる。
(もっと読む)
車両の制御装置

【課題】車両の制御装置において、ドライバから減速要求があったとき、排気環流を実施していても、適正に車両駆動トルクを低下させると共に内燃機関の燃焼悪化を抑制可能とする。
【解決手段】減速トルク発生手段として吸気可変動弁機構25を適用し、燃焼悪化抑制手段として電子スロットル装置34を適用し、制御手段としてのエンジンECU111は、EGR弁40によりEGR通路39を開放し、排気管36の排気ガスの一部をEGR通路39を通して吸気マニホールド29に還流している状態で、ドライバから減速要求があったときには、電子スロットル装置34を制御してスロットル弁33の開度を維持したままで、吸気可変動弁機構25により吸気弁21の閉止時期及び開放期間を変更する。
(もっと読む)
アキュムレータ制御装置
【課題】ベローズを備えるアキュムレータにおいて、ベローズとストッパとの当接を防止する。
【解決手段】ベローズ64は、アキュムレータ50のシェル58内部の底面に一端が固定され、軸方向に伸縮自在にされている。ベローズキャップ70は、ベローズ64の他端に取り付けられ、アキュムレータのシェル内を油室90とガス室72とに分離する。ストッパ88は、ベローズキャップ70と当接することでベローズの収縮量を規制する。上限圧測定手段は、ベローズキャップがストッパと当接するときのアキュムレータ圧である上限圧を測定する。モータ制御手段は、アキュムレータ圧が上限圧を超えないように、アキュムレータに蓄圧するポンプを駆動するモータの動作を制御する。
(もっと読む)
車両用制動装置
【課題】車両用制動装置において、電源装置が失陥してもホイールシリンダに油圧を供給可能として適正な制動力を確保することで、信頼性及び安全性の向上を図ると共に制動操作フィーリングの向上を図る。
【解決手段】ABS24からの制御圧をホイールシリンダ25FR,25FL,25RR,25RLに供給可能な第1制御圧通路として、ABS24の油圧供給配管39a,39b,40a,40bを適用すると共に、油圧供給配管40bと背面圧力室R3の第3圧力ポート48との間に、ABS24からの制御圧をマスタシリンダ11における背面圧力室R3に供給可能な第2制御圧供給配管49を設ける。
(もっと読む)
車両の走行安全装置
【課題】連続するカーブなど曲率が旋回中に変化する場合であっても曲率に応じた適正なブレーキアシスト制御が可能な車両の走行安全装置を提供する。
【解決手段】ブレーキ制御部30が、現在ブレーキアシスト制御中となるR1カーブに対する第1ブレーキアシスト量と、ブレーキアシスト制御中のR1カーブに続くR2カーブに対する第2ブレーキアシスト量とを比較し、より大きいブレーキアシスト量に基づいてブレーキ出力を増加させることを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】複数の制御モードを有する車両挙動制御に対し、クルーズ制御において、演算を複雑にすることなく車両挙動制御で選択された車両挙動特性に適合する出力特性を得ることができ、良好なドライバビリティを得る。
【解決手段】車両挙動制御部1は、ABS制御と横滑り防止制御とトラクション制御の全てを実行する通常モードと、ABS制御と制限した横滑り防止制御とトラクション制御を実行するトラクションモードと、ABS制御のみを実行するOFFモードの3つのモードが設定されており、モード切換スイッチ14でドライバにより選択される。一方、クルーズ制御部2には、モード切換スイッチ14に応じたそれぞれのモードに対応する上限ガード値が設定されており、クルーズ制御時は、この上限ガード値で目標車速を制限することで、通常運転時の車両挙動制御のモードに適合する出力特性を設定する。
(もっと読む)
ブレーキ制御装置
【課題】異常が発生した場合において制動力を充分に確保することを可能とするブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置は、液圧制動力と回生制動力とを併用して制動力を発生させる。このブレーキ制御装置は、異常時において補助的に発生させる回生制動力の要求値を演算する制御部と、運転者のブレーキ操作に連動して変動する検出値を制御部に各々が出力する複数のセンサと、を備える。制御部は、複数のセンサのいずれかを選択し、選択されたセンサの検出値を要求値の算出の基礎として用いる。
(もっと読む)
車両の運転支援装置
【課題】先行車と自車両と後続車の走行状態を適切に認識し、先行車と自車両との運転状態、及び、自車両と後続車との運転状態を考慮して先行車と後続車に対する自車両位置が実走行に合致した最適な位置となるように支援しドライブフィーリングを向上させる。
【解決手段】制御ユニット7は、自車両1の先行車との追突リスクRfを、自車両1の車間時間THWfと自車両1の衝突余裕時間TTCfとに応じて設定する一方、自車両1の後続車による被追突リスクRrを、後続車の車間時間THWrと、先行車との追突リスクRfにおける衝突余裕時間TTCfの重みよりも大きく重み付けした自車両1の被衝突余裕時間TTCrとに応じて設定し、これら先行車との追突リスクRfと後続車による被追突リスクRrに応じてブレーキ制御、及び、警報制御を行う。
(もっと読む)
自動制動制御装置
【課題】自動ブレーキの介入による制動制御に対する終了処理を適切に行うことができる自動制動制御装置を提供する。
【解決手段】制動制御ユニット5は、自車両1と制御対象との相対関係(相対速Vrelが離れ方向に変化しているか否か、相対距離dが第2のブレーキ介入距離D2よりも大きくなったか否か等)に基づいて制動制御の終了を判定する第1の判定要件と、ドライバの旋回操作の有無(操舵角|δ|、操舵角速度|δ’|、ヨーレート|γ|が閾値以上となったか否か等)に基づいて制動制御の終了を判定する第2の判定要件とを有し、第2の判定要件に基づく終了処理時の減速度変化量ΔG2を、第1の判定要件に基づく終了処理時の減速度変化量ΔG2よりも相対的に大きく設定する。
(もっと読む)
車両の接触回避支援装置
【課題】 自車に接近してくる対向車に対する接触回避支援制御を的確に行えるようにする。
【解決手段】 対向車判定手段M2が物体検知手段M1により検知された物体および自車の相対速度から対向車を判定し、対向車進路予測手段M3が対向車進路を予測し、対向車間隔検知手段M4が複数の対向車間の車間距離あるいは車間時間を検知し、接触回避支援手段Uが前記車間距離あるいは車間時間に応じて、対向車との接触を回避し、あるいは接触した場合の被害を軽減する接触回避支援の内容を変更する。複数の対向車間の車間距離あるいは車間時間が短いと運転者は対向車に注意を集中し、逆に前記車間距離あるいは車間時間が長いと運転者は対向車に注意を集中しなくなるが、前記車間距離あるいは車間時間に応じて接触回避支援の内容を変更することで、運転者の注意力に応じた必要かつ充分な接触回避支援を行うことができる。
(もっと読む)
運転支援装置
【課題】急ブレーキ操作を予測し、効率的で的確な運転支援を行うことを可能とする運転支援装置を提供する。
【解決手段】本発明の運転支援装置は、運転操作に係るデータを取得する運転操作データ取得手段と、運転状況に係るデータを取得する運転状況データ取得手段と、運転操作や運転状況と関係のない生理状態データと、運転操作データと、運転状況データと間の因果関係を、ベイジアンネットワークを用いることで確率的に定めたテーブルを更新するテーブル更新手段と、前記テーブル更新手段によって更新されたテーブルと現在の運転状況データとから急ブレーキの運転操作を予測する急ブレーキ操作予測手段と、を有すことを特徴とする。
(もっと読む)
車両の運転支援装置
【課題】路側の状況に応じて自車両の走行制御を行う。
【解決手段】車両の運転支援装置は、自車両Cの走行路内における走行位置を検出する走行位置検出部1cと、走行路の路側の情報を取得する路側情報取得部1eと、自車両Cが走行する基準ラインLfを算出する通常時基準ライン算出部1d及び通常時基準ライン補正部1jと、基準ラインLfと走行位置検出部1cによって検出される自車両Cの走行位置とに基づいて、自車両Cが基準ラインLfに沿って走行するように走行制御する操舵制御部1kとを備えている。通常時基準ライン算出部1d及び通常時基準ライン補正部1jは、路側情報取得部1eの結果に応じて基準ラインLfを算出する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】運転者の心理的状態に対応した適切な車速の制御を行うことはできなかった。
【解決手段】自車両の前方の下り勾配の道路を走行する際に前記自車両の運転者に心理的影響を与える要因を示す要因情報を取得し、前記要因情報に基づいて前記下り勾配の道路を走行する際に前記運転者に与えられる総合的な心理的影響を取得し、前記総合的な心理的影響に応じて前記自車両に搭載された車速制御部に車速を制御させる。
(もっと読む)
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
衝突予測装置
【課題】 自車両と障害物との衝突を予測する際に、自車両における障害物の衝突位置を精度よく検出することができる衝突予測装置を提供する。
【解決手段】衝突予測ECU1における衝突位置分布演算部20は、衝突位置演算部19が予測した衝突予測位置に基づいて、自車両の領域を分割して得られる分割領域における衝突予測領域としての信頼度を算出する。衝突位置分布演算部20は、しきい値マップ記憶部21に衝突予測領域としての信頼度を参照して衝突予測領域を予測する。ここで、自車両の領域を分割して得られる分割領域AX,BXのうち、第1列分割領域AXは、2つの第2列分割領域BXと重なって設定されている。また、第2列分割領域BXは、2つの第1列分割領域AXと重なって設定されている。
(もっと読む)
車両制御装置及び該装置を搭載した車両
【課題】制動力を適切に設定可能とすることによりオペレータのフィーリングを最適な状態とする。
【解決手段】アクセル開度検出センサ2と、車速センサ3と、車両の減速度を調整可能な制動手段(ソレノイド制御ブレーキ)7とを備えた制御装置10において、所定のパラメータに応じて前記減速度が設定された減速度テーブル12を複数格納した記憶部10bを備え、減速度選択手段4、5により、目的とする減速度を選択された際に、車速が予め設定された車速V1以下で、且つアクセル開度が予め設定されたアクセル開度以下である場合に、前記減速度の選択を有効として、前記減速度選択手段により選択された減速度に対応する減速度テーブル12を前記記憶部10bより読み出し、該テーブルに規定された制動パラメータに基づき前記制動手段を作動させて、選択された減速度になるように減速制御を実行する。
(もっと読む)
制動装置及び制動制御装置
【課題】ブレーキ液の圧力の変化に起因するブレーキペダルの操作フィーリングの悪化を抑制すること。
【解決手段】車両100が備える制動装置101は、摩擦制動手段41FL、41FR、41RL、41RRを有する。ブレーキペダル20からの入力は、マスタシリンダ44内のブレーキ液に伝達され、摩擦制動手段41FL、41FR、41RL、41RRへ伝達される。また、車両100は、変速装置61を介して電動機60の出力を駆動輪である車輪10FL、41FRへ伝達する。そして、車両100の制動時においては、電動機60及び変速装置61による制動力と、摩擦制動手段41FL、41FR、41RL、41RRによる制動力とが発生する。
(もっと読む)
危険回避支援システム
【課題】この発明は、運転者に通常レベルの安全運転を意識させた上で、危険回避時には、運転者の意図する危険回避動作を素早く且つ確実に支援できる危険回避支援システムを提供することを課題とする。
【解決手段】危険回避支援システム1は、前方車両が急ブレーキをかけた場合など、当該車両が危険回避動作を必要とする状況に陥ったことを検知する検知部2を有する。システムの制御部10は、この検知部2を介して危険回避動作が必要であることを検知したとき、当該車両の動作モードを通常モードから最大支援モードに切り換える。
(もっと読む)
車両の制動制御装置
【課題】アンダーステアの早期解消により旋回挙動の安定性確保を図ることができる車両の制動制御装置を提供する。
【解決手段】回生制動力制限手段を有する制動制御装置において、車両の左右輪の車輪速差を検出する車輪速左右差検出手段を備え、回生制動力制限手段は、車輪速左右差に基づいて、前記アンダーステア傾向に応じた前記回生制動力の制限量を変更することを特徴とする制動制御装置。前記回生制限制御部5dは、車輪速左右差が小さいほど、かつ、車輪速前後差が大きいほど、旋回制動時の回生制動トルクをより制限する。
(もっと読む)
車両制御装置
【課題】アンチロックブレーキ制御時にも、モータから電力を回収することができる車両制御装置を提供する。
【解決手段】車両制御装置1は、アンチロックブレーキ制御時にも回生ブレーキを作動させる。
(もっと読む)
161 - 180 / 251
[ Back to top ]