
Fターム[3D246HC01]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | マップによるもの (251)
Fターム[3D246HC01]に分類される特許
121 - 140 / 251
制駆動力制御装置

【課題】モードの切り替えにより生じる制動力または駆動力の変化を、一層確実に抑制することのできる制駆動力制御装置を提供する。
【解決手段】アクセルペダルの操作量またはブレーキペダルの操作量のいずれか一方を用いて、車両で発生する駆動力および制動力を求める第1モードと、アクセルペダルの操作量から駆動力を求め、かつ、ブレーキペダルの操作量から制動力を求める第2モードとを相互に切り替えることのできる制駆動力制御装置において、第2モードから第1モードに切り替える条件が成立した際に、アクセルペダルの操作量が所定値を超えると、第2モードから第1モードに切り替えて、アクセルペダルの操作量から駆動力および制動力を求めるモード切替手段(ステップS2ないしS6)を備えている。
(もっと読む)
ブレーキ力取得装置

【課題】ブレーキ力取得装置の圧縮力検出素子の耐久性を向上させる。
【解決手段】アンカ部材16において、圧縮力検出素子40が剛体である荷重作用部50を介して荷重Fを受ける構造となっており、かつ、荷重作用部50に加えられる荷重が、一対の連結部54,56と、それの中間にある圧縮力検出素子40とが受ける構造となっている。その結果、偏心荷重によって、圧縮力検出素子40に曲げ力が加えられ難くすることができ、その分、圧縮力検出素子40の耐久性を向上させることができ、寿命を長くすることができる。
(もっと読む)
ブレーキ力取得装置
【課題】ブレーキ力取得装置の改良を図る。
【解決手段】アンカ16にブレーキシューが当接することによって荷重が作用する場合に、ドラムの摩擦面に直交する方向に並べて圧縮力検出素子46,48が配設される。また、圧縮力検出素子46,48は、剛体である荷重作用部50とアンカ本体62等とに把持される。荷重作用部50に作用する荷重は、圧縮力検出素子46,48と連結体54,56とによって受けられる。そのため、荷重作用部50に作用する荷重は、圧縮力検出素子46,48によって検出された圧縮力の和に応じた大きさとして取得することができ、荷重作用点Qの基準点Pからのずれ量xは、圧縮力検出素子46,48によって検出された圧縮力の差に応じた大きさとして取得することができる。
(もっと読む)
車両停止判定装置
【課題】車両の停止を確実に判定することができる車両停止判定装置を提供する。
【解決手段】車両停止判定装置1では、ECU2において、制動する車両10の停止が判定されると共に、車両10の車速がABS制御装置5の作動する下限速度以下となった後でタイマ時間が経過するまでの間、かかる車両10の停止の判定が禁止される。これにより、車両停止判定装置1では、車輪のロックを車両10の停止と誤判定するのを抑制することが可能となる。
(もっと読む)
車両制御装置
【課題】誤操作によってアクセルペダルが戻された場合であってもスムーズな発進を可能とする車両制御装置を提供する。
【解決手段】電動パーキングブレーキ装置の解除条件が成立しているか否かを判定する解除条件判定手段と、車両が停止している路面の傾斜を検出する傾斜検出手段と、前記路面の傾斜角度に応じた推定走行抵抗を算出する推定抵抗算出手段と、車両の駆動力を算出する駆動力算出手段と、アクセルペダルからの入力に基づいてエンジンの出力を制御するエンジン出力制御手段とを備える車両制御装置であって、エンジン出力制御手段は、解除条件判定手段により電動パーキングブレーキの解除条件成立が判定されかつ駆動力が推定走行抵抗以上となった後に、アクセルペダルからの入力に関わらずエンジンの回転数が所定の下限エンジン回転数以上となるようにエンジンの出力をフィードバック制御する構成とする。
(もっと読む)
ブレーキ制御装置
【課題】増圧制御弁の個体差による昇圧性能バラツキに起因して、所望の制動力が得られなくなることを抑制する。
【解決手段】高μ路側の前輪FR、FLと対応する増圧制御弁17、37にて第1差圧Plowを第1時間Tlow継続し、第2差圧Phighを第2時間Thigh継続することを繰り返すことで、高μ路側の車輪のW/C圧を緩増圧する。したがって、W/C圧の昇圧性能のばらつきを抑制することができ、左右前輪FR、FLのW/C圧の差圧を一定範囲に抑えることが可能になる。これにより、車両に加わるヨートルクを抑制でき、スピンを防止することが可能になる。そして、第1差圧Plowを一定値にせずに、段階的に徐々に低下させていくことで、第1、第3増圧制御弁17、37の個体差に起因した発生させられる差圧のばらつきを緩増圧中に更に低減することができる。
(もっと読む)
車両制御装置
【課題】車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を行うこと。
【解決手段】設定した目標制御量又は/及び目標制御タイミングで車両10の挙動制御を行う車両制御装置において、車両総重量を推定又は検出する重量演算手段1eと、車両重心位置を推定又は検出する重心位置演算手段1dと、車両10の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段1cと、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた旋回特性指数値とに基づいて車両10が所望の旋回姿勢となる目標制御量又は/及び目標制御タイミングを設定する旋回制御手段1bと、を設けること。
(もっと読む)
制動力制御装置
【課題】制動力の制御の精度を向上させることができる制動力制御装置を提供する。
【解決手段】車両に作用させる制動力を制御する制動力制御装置であって、車両に作用させる駆動力Fdriveを取得する駆動力取得手段と、駆動力取得手段により取得された駆動力Fdriveに基づいて制動力を推定する制動力推定手段とを備えることで、駆動力Fdriveと制動力との釣り合い点を意図的に生成することができるので、ブレーキアクチュエータの製造ばらつきや経年劣化等を含めた正確な制動力を推定することが可能となる。
(もっと読む)
車両の運動制御装置
【課題】
複数の状態量間の位相差を補償し、車両のヨーイング運動、及び/又は、ローリング運動における安定性を維持し得る車両の運動制御装置を提供する。
【解決手段】
車両の操舵角速度を取得する操舵角速度取得手段と、操舵角速度に基づいて最大操舵角速度を演算する最大操舵角速度演算手段と、最大操舵角速度に基づいて基準旋回状態量を決定する決定手段と、車両の実旋回状態量を取得する実旋回状態量取得手段と、基準旋回状態量、及び、実旋回状態量に基づいて制動トルクを制御する制御手段とを備える。制御手段は、実横加速度が基準横加速度を超えたときに、車輪への制動トルク付与を行う。
(もっと読む)
車両横滑り運動状態量推定装置
【課題】摩擦係数や車両の運動状態、あるいは路面のバンク角が変化する過渡期を含めて車両の横滑り運動の状態量の推定精度を高めることができる車両横滑り運動状態量推定装置を提供する。
【解決手段】車輪2−iと路面との間の摩擦特性モデルを含む車両モデルを用い、各車輪2−iの路面反力モデル値を求めると共に横滑り運動状態量モデル値を求める手段と、路面反力モデル値の合力によって車両に発生する横加速度モデル値と横加速度検出手段15,22fの出力が示す横加速度検出値との偏差Accy_errを求める手段と、上記合力によって車両に発生するヨー軸周りの角加速度モデル値と角加速度検出手段13,22cの出力が示す角加速度検出値との偏差γdot_errを求める手段と、偏差Accy_err及びγdot_errに応じて横滑り運動状態量モデル値を補正してなる値を横滑り運動状態量の推定値Vgy_estmとして決定する手段とを備える。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】カーブの勾配に応じて変化する車両の挙動やカーブの状況を考慮した適切な運転支援を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置50は、車両の進行方向に存在するカーブの勾配及び旋回方向を特定し、当該特定した勾配及び旋回方向に基づき、カーブを走行する車両が当該カーブの走行車線から逸脱する可能性の高い逸脱方向を特定する逸脱方向特定部53aと、逸脱方向特定部53aが特定した逸脱方向におけるカーブの状況を特定し、当該特定した状況に基づき支援内容を決定し、当該決定した内容の支援を行う支援部53bとを備える。
(もっと読む)
ブレーキ装置
【課題】 ブレーキ装置において、バキュームブースタの負圧−助勢限界マスタシリンダ圧特性にバラツキがあっても、その特性に相当する負圧−助勢限界マスタシリンダ圧マップを適正に補正することで、特性バラツキの影響をできるだけ抑制して、ブレーキ装置に所望のブレーキ性能を十分に発揮させる。
【解決手段】ブレーキ装置のブレーキECU26は、負圧−助勢限界圧マップと、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたか否かに判別された、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を取得した負圧において比較し、該比較結果に基づいて負圧−助勢限界圧マップを補正する補正手段を備えている。
(もっと読む)
摩擦円推定装置
【課題】 摩擦円の推定精度を高くすることができる摩擦円推定装置を提供すること。
【解決手段】 タイヤから車体に伝達する振動伝達特性が減衰特性となる周波数を有する同定トルクを車輪に付与するようにした。
(もっと読む)
自動二輪車のブレーキ装置
【課題】連動ブレーキシステムを搭載した自動二輪車であっても、違和感のないブレーキ操作を行うことができる自動二輪車のブレーキ装置を提供する。
【解決手段】自動二輪車のブレーキ装置10は、ブレーキレバー12及びブレーキペダル14の各操作に応じて前輪側ブレーキキャリパ16及び後輪側ブレーキキャリパ18を電気的に駆動制御可能であると共に、ブレーキペダル14の操作に基づき後輪側ブレーキキャリパ18と前輪側ブレーキキャリパ16とを連動可能に構成されており、ブレーキペダル14が操作されて後輪側ブレーキキャリパ18と連動して前輪側ブレーキキャリパ16が制動力を発生している状態で、さらにブレーキレバー12が追加操作された場合に、前輪側ブレーキキャリパ16に作用させる目標液圧を、ブレーキレバー12の追加操作に対応した制動力よりも小さな制動力となるように、予め設定された所定の関数を用いて補正する。
(もっと読む)
ブレーキ制御装置
【課題】発進前にスノーフェード対策を行うことのできるブレーキ制御装置を提供する。
【解決手段】車輪と共に回転するローターと当該ローターに押圧することで制動力を発生させるパッドとの間のクリアランスを推定するクリアランス推定手段と、クリアランス推定手段によって推定されたクリアランスに基づいてスノーフェードを検知するスノーフェード検知手段とを備える。クリアランスを推定してスノーフェードを検知することによって、スノーフェードを正確に検知することが可能となり、確実にスノーフェードの解消を行う。
(もっと読む)
車両用ブレーキ装置
【課題】 車両用ブレーキ装置において、ブレーキペダルの踏み込み開始時点から踏み込みを解除するまでの全領域において回生制動力を適切に利用することにより、高回生効率、かつ高燃費を達成する。
【解決手段】車両用ブレーキ装置は、ブレーキペダル21の踏み込み時に、ブレーキ操作状態が踏み込み開始時点の状態である踏み込み開始状態から所定状態となるまでの間は基礎液圧制動力が所定値以下となるようにその発生を制限する基礎液圧制動力発生制限手段である、ブレーキペダルとマスタシリンダのピストンとの間に両部材を連結するために設けられた連結部材は、ブレーキ操作状態が踏み込み開始状態から所定状態までの間はブレーキペダルに付与された操作力をピストンに伝達しないようにし、所定状態以降はブレーキペダルに付与された操作力をピストンに伝達するように構成された操作力伝達機構70を備えている。
【選択図】 図11 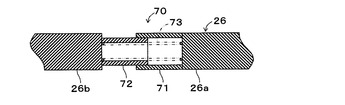 (もっと読む)
(もっと読む)
車載用報知装置
【課題】車両の運転者に対して回生ブレーキの効率的な利用を促す情報をより効果的に報知するための技術を提供する。
【解決手段】回生教示コンピュータ19は、回生制御コンピュータ20から入力されるブレーキの作動状況に関する情報に基づき、運転者によるブレーキ操作によって減少した運動エネルギ分に相当する制動エネルギのうち、回生ブレーキシステムによる回生によって回収できなかった損失エネルギに関する損失情報を導出する。そして、その導出した損失情報に基づいて、車両の走行前、走行中、走行終了後の各場面において損失エネルギに関する所定の情報を生成し、その生成した情報を運転者に報知する。
(もっと読む)
ブレーキ制御装置及びブレーキ制御方法
【課題】低い電圧でも充分な制動性能を発揮することを可能とするブレーキ制御技術を提供する。
【解決手段】ブレーキ制御装置10は、作動液圧に応じて第1の車輪に制動力を付与する第1ホイールシリンダと、作動液圧に応じて第2の車輪に制動力を付与する第2ホイールシリンダと、電流の供給を受けて第1ホイールシリンダの作動液圧及び第2ホイールシリンダの作動液圧を個別的に制御するブレーキアクチュエータ80と、ブレーキアクチュエータ80に電流を供給する電源と、電源の充電状態に基づいて第1及び第2の車輪間の制動力配分を設定し、該制動力配分に従ってブレーキアクチュエータ80を制御する制御部と、を備える。
(もっと読む)
電気自動車の回生制動制御装置
【課題】
電気自動車の回生制動制御装置に関し、良好な制動フィーリングを実現しつつ、エネルギ回収効率を好適にする。
【解決手段】
電気自動車の回生制動制御装置であって、第1摩擦制動装置15bによる機械的制動トルクの推定値である第1機械的制動トルクTmRを、制動が駆動輪11bと路面間の最大摩擦力でなされたと仮定した時の制動トルクである第1理想制動トルクTIRよりも小さくなるように設定する第1機械的制動トルク推定手段22と、第1理想制動トルクTIRと第1機械的制動トルクTmRとの差を目標回生制動トルクTCとして算出する目標回生制動トルク推定手段23とを備えて構成する。
(もっと読む)
路面摩擦係数推定装置
【課題】車両が走行している路面の摩擦係数の推定値が不安定な変動を生じたり、該推定値の精度が低下するのを防止しつつ、該摩擦係数の推定を行う。
【解決手段】路面反力の合力によって車両1に作用する比較対象外力の第1推定値Mnsp_estmを求める手段(S102〜S116,S122−2)と、比較対象外力に対応する慣性力を規定する車両1の運動状態量γdot,Accyの観測値から比較対象外力の第2推定値Mnsp_sensを求める手段(S122−1)と、摩擦係数μの変化に対する比較対象外力の感度pを算出するμ感度算出手段(S122−4)を備え、偏差(Mnsp_sens−Mnsp_estm)とμ感度pとに応じて路面摩擦係数の推定値μ_estmを更新する。
(もっと読む)
121 - 140 / 251
[ Back to top ]