
Fターム[3D246HC01]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | マップによるもの (251)
Fターム[3D246HC01]に分類される特許
61 - 80 / 251
電動車両の制御装置
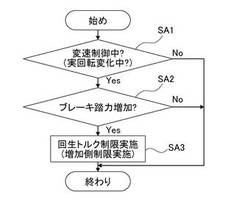
【課題】回生制御中において変速制御中または変速制御終了時にブレーキ踏み込み操作があっても、スリップ締結に伴う変速ショックの発生を防止することができる電動車両の制御装置を提供する。
【解決手段】統合コントローラは、モータ/ジェネレータの回生制御中において自動変速機が変速制御中であるか否かを判断する(ステップSA1)。ステップSA1の判断結果がYESの場合にはブレーキ踏力が増加しているか否か、つまり、ブレーキ踏み込み操作があるか否かを判断する(ステップSA2)。ステップSA2の判断結果がYES、つまり、ブレーキ踏み込み操作があると判断した場合には、モータ/ジェネレータの回生トルクの増加を制限してブレーキ制動を行う(ステップSA3)。具体的には、各輪のブレーキユニット(メカブレーキ)を駆動して、各輪の機械制動を行う。
(もっと読む)
車両運動制御装置

【課題】車両の走行状態に適した運動制御を、より容易に行うことのできる車両運動制御装置を提供すること。
【解決手段】車両運動制御装置2に、車両1のタイヤ温度を取得するタイヤ温度取得部50と、車両1の運動を制御する運動制御部54と、を備え、運動制御部54は、車両1の走行状態に応じて、タイヤ温度取得部50で取得したタイヤ温度に基づく運動制御と、予め定められた所定値に基づく運動制御とを切替える。これにより、タイヤ温度に基づいて運動制御を行う場合には、走行時に変化するタイヤ温度に基づいて制御することにより適切な制御を行うことができ、所定値に基づいて運動制御を行う場合には、演算時間の短縮を図ったり、ECU40の負荷を低減したりすることができる。この結果、車両1の走行状態に適した運動制御を、より容易に行うことができる。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映させて走行特性および人間の間隔に刺激を与える演出装置を制御する。
【解決手段】車両の走行状態に基づく指標を求め(ステップS2)、該指標に応じて前記車両の走行特性を変化させる車両の制御装置において、前記指標は、前記車両の挙動が機敏になるように前記走行特性を変化させる方向には前記走行状態の変化に応じて迅速に変化し、かつ前記車両の挙動の機敏さが低下するように前記走行特性を変化させる方向には前記走行状態の変化に対して遅れて変化する指標を含み、前記車両の運転者の五感の少なくとも一部に刺激を与える演出装置の出力内容を前記指標に基づいて変化させる(ステップS8,S9)ように構成されている。
(もっと読む)
車両の制動力制御装置
【課題】車両挙動を適切に保つ際のブレーキ制御量を最小化してドライバが感じる減速度(失速感)を最小とし、且つ、ブレーキ負荷を低減する。
【解決手段】エンジン駆動力を算出し、エンジン駆動力の時間的な変化量(駆動力の変化量)を算出し、車両に作用する走行抵抗を算出し、これら駆動力の変化量と走行抵抗とに基づいて、走行抵抗により発生する減速度を、ドライバが違和感なく許容できる(失速感として感じない)減速度として用いて、走行抵抗以上で、且つ、駆動力の変化量以下の車輪に付加する制動力(付加制動力)を設定して、この付加制動力を基に、目標ブレーキ液圧を算出してブレーキ駆動部15に出力する。
(もっと読む)
速度制御装置
【課題】移動体の速度制御を行う際に、移動体の運転者に違和感や恐怖感を抱かせることを抑制すること。
【解決手段】車両の運転者の注視点を定めるとともに、車両の周囲環境の運動を運転者の網膜球面を模擬した座標系に投影し、その投影した運動における、注視点から周囲に放射状に拡がる発散成分を算出する。さらに、注視点を含む所定のエリア内における、発散成分の総量を、車両の運転者が感じる速度感を示す指標として求める。そして、求めた発散成分の総量が一定となるように、車両の走行速度を制御する。
(もっと読む)
車両の制動制御装置
【課題】ポンプの駆動態様の変更に起因した駆動音の大きさの変動によって車両の搭乗者に不快感を与えることを抑制できると共に、ポンプの駆動態様をホイールシリンダからリザーバ内に流入するブレーキ液の液量に応じた駆動様態に設定できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中において車両が走行している路面が高μ路から低μ路に変わっていない場合、偏差補正量Qreq_Aveと基準吐出量Qreq_baseとを加算することにより設定された目標吐出量Qreqのブレーキ液がポンプから吐出されるように偏差ポンプ駆動制御を実行する。一方、ECUは、車両が走行している路面が高μ路から低μ路に変わった場合、緊急補正量Qreq_Skidと基準吐出量Qreq_baseとを加算することにより設定された目標吐出量Qreqのブレーキ液がポンプから吐出されるように緊急ポンプ駆動制御を実行する。
(もっと読む)
車両用制動装置
【課題】回生制動による制動力を状況に応じて変えるとともに、車両の運動エネルギを好適に電気エネルギに変換できる車両用制動装置を提供することを課題とする。
【解決手段】走行用モータ3の減速比を変更可能な変速機4aを有するハイブリッド車両HVに備わり、ブレーキペダルの操作量に応じて設定される目標制動力に基づいてブレーキアシスト制御する車両用制動装置1とする。そして、走行用モータ3を回生制御して回生制動力を発生する回生ブレーキと、油圧で作動するブレーキ作動部Brで摩擦制動力を発生する油圧ブレーキと、を備え、ブレーキアシスト制御の開始条件が成立したとき、車両用制動装置1は、回生制動力が低下するように減速比を設定した後で減速比の変更を停止し、回生制動力と摩擦制動力で目標制動力を発生することを特徴とする。
(もっと読む)
エンジン自動停止再始動制御装置
【課題】エンジン再始動時の車体の前後方向の振動をより抑制することができるエンジン自動停止再始動制御装置を提供する。
【解決手段】エンジン再始動を行う際に、ショック抑制ブレーキ制御を行い、実車軸トルク変化速度と理想車軸トルク変化速度との間の差である変化速度差に応じた制動トルクを発生させる。これにより、エンジン再始動時に生じる振動トルクを抑制することが可能となり、車体のショックを抑制することが可能となる。
(もっと読む)
ブレーキ制御装置
【課題】マスタシリンダと液圧ユニットを繋ぐ配管側と、液圧ユニットとホイルシリンダとを繋ぐ配管側とでは液圧剛性が異なるため、圧力変化に基づく演算に誤差が生じ、適切なベース圧が得られず、運転者に違和感を与えるという問題があった。運転者に違和感を与えることなくブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】ブレーキ制御装置において、ポンプの吐出流量に応じてマスタシリンダ圧を補正し、補正されたマスタシリンダ圧に基づいてホイルシリンダ圧を増減圧制御することとした。
(もっと読む)
車両用制動装置
【課題】 バキュームブースタによる助勢が限界となるときに液圧ポンプを適切に作動させてブレーキ液圧をリニアに変化させる車両用制動装置装置を提供すること。
【解決手段】 ブレーキ電子制御ユニット33はマスタシリンダ液圧センサ31からマスタシリンダ液圧Pmを入力し踏力センサ32から踏力Fを入力する。そして、入力した液圧Pmおよび踏力Fを用いて予め設定された助勢限界判定条件が成立するか否かを判定する。判定条件が成立するときには、ユニット33は入力した液圧Pmおよび踏力Fを始点としバキュームブースタによって助勢されるときのマスタシリンダによる踏力Fに対する液圧Pmの変化勾配を傾きとして目標ブレーキ液圧を決定するための目標関数を設定する。これにより、ユニット33は目標ブレーキ液圧と液圧Pmとの差分に応じて駆動回路34を介して液圧ポンプHP1,HP2を加圧させる。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
液圧発生装置
【課題】回生協調ブレーキに適用した場合に、回生制動力を十分に機能させることのできる液圧発生装置の提供。
【解決手段】シリンダ511には、プライマリピストン52aおよびセカンダリピストン52bが液密的に嵌合し、セカンダリピストン52bの前方には、作動ピストン57が摺動可能に嵌合している。プライマリピストン52aとセカンダリピストン52bとの間にはプライマリ室56aが形成され、セカンダリピストン52bと作動ピストン57との間にはセカンダリ室56bが形成されている。また、作動ピストン57とシリンダ511の底部515との間には、リザーバタンク24と連通した作動室59が形成されている。プライマリピストン52aへの入力があると、プライマリ室56aおよびセカンダリ室56bを縮小させる以前に、作動ピストン57が作動スプリング58を圧縮させながらシリンダ511内を前進し、作動室59を縮小させる。
(もっと読む)
衝突被害軽減装置、及びその方法
【課題】交差点における停止線で停止している自車両に後続車両が追突するときに、交差車線、或いは横断歩道に飛び出してしまう可能性を可能な限り低くし、且つ、上述した追突の被害を可能な限り低くできる衝突被害軽減装置、及びその方法を提供する。
【解決手段】後続車両に追突されたときの被害を自車両の制動力を制御して軽減する衝突被害軽減装置であって、自車両が追突されたときに生じるエネルギーを推定する推定手段と、交差点において停車している自車両から予め定められた停止位置までの距離を測定する測定手段と、エネルギーと停止位置までの距離とに基づいて自車両の制動力を予め制御する制動力制御手段とを備える。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供する。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値と下限値の間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値より大きくなることおよび下限値より小さくなることを防止する。
(もっと読む)
車両走行制御装置および車両走行制御方法
【課題】ドライバの回避操作に対応する制御介入により車両の安定性が損なわれるといった事態を抑制する。
【解決手段】車両CのリスクポテンシャルRPが第1のリスクポテンシャルRf1を超えることにより、ラップ率ヨーモーメントγrに基づいて車両Cに目標ヨーモーメントγfが付与される。また、車両CのリスクポテンシャルRPが第2のリスクポテンシャルRf2を超えることにより、舵角ヨーモーメントγsに基づいて車両Cに目標ヨーモーメントγfが付与される。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、設定された横移動距離Yeに対して縦移動距離が最短となる回避を行う場合の予測回避時間teを導出するための3次元マップを用いて予測回避時間teを導出し、導出された予測回避時間te後の障害物の位置のy成分を横移動距離Yeとして設定し、設定された横移動距離Yeに対して縦移動距離が最短となる車体合成力を導出するための最短2次元マップを用いて、移動する障害物を回避するために横移動距離に対する縦移動距離が最短になる車体合成力及び回避軌道を導出する。
(もっと読む)
ハイブリッド自動車
【課題】走行モードが切換えられる際のトルクショックを低減し、切換え後の変速制御を排除できるハイブリッド車を提供する。
【解決手段】車両1に搭載されるエンジン2と、走行用モータ4と、バッテリ12と、発電機3と、車速検出手段se1、se2と、バッテリの残容量Eqを検出する残容量検出手段16とを備え、残容量Eqが第1閾値Eq1以上の場合に第1走行モードEV、第2走行モードMs、第3走行モードMpのいずれかで走行するよう選択するモード選択手段A1を備え、モード選択手段A1は、残容量Eqが第1閾値未満の状況下では第1速度Sc1より小さい第2速度Sc2以上の場合に第3走行モード域Mpを選択し、所定の第2速度Sc2未満の場合に第2走行モードMsを選択し、第3速度未満Sc3の場合に第1走行モードEV又は第2走行モードMsを選択する。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
61 - 80 / 251
[ Back to top ]