
Fターム[3D246HC01]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | マップによるもの (251)
Fターム[3D246HC01]に分類される特許
21 - 40 / 251
磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置
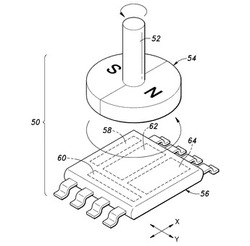
【課題】磁気式回転角検出装置に外乱磁界が作用して回転角検出誤差を生じる状態を的確に判定すること。
【解決手段】回転軸52の回転に伴って回転変位する磁石54と、磁石54の回転面に平行な面上に互いに直交方向する軸線方向に沿って配置され、90度の回転位相をもって磁石54の磁気強度を検出する2個の磁気検出素子58、・60と、磁気検出素子58、60により検出される磁気強度を合成した合成ベクトルに基づいて回転軸52の回転角を算出する回転角算出部62とを備えた磁気式回転角検出装置において、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部64を設ける。
(もっと読む)
車両用制動制御装置

【課題】従来よりも適切な車両の制動制御を可能とする車両用制動制御装置を提供する。
【解決手段】自車両と障害物との衝突の危険性に応じて自動的に車両を制動する車両用制動制御装置であって、自車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、衝突判定手段によって自車両と障害物との衝突の危険性が高いと判定された場合、自車両に自動的に制動力を発生させる自動制動手段と、自動制動手段が発生させる制動力の大きさを自車両のドライバーの操舵操作に応じて漸減する制動力漸減手段とを備え、制動力漸減手段は、制動力の漸減速度を自車両のドライバーのアクセル操作に応じて速くすることを特徴とする。
(もっと読む)
駆動装置および駆動制御方法
【課題】制動装置の摩擦材の状態を精度高く推定し、推定された摩擦材の状態に基づいて車両の駆動力を適切に制御する。
【解決手段】ECUは、回生制動パワーPrgを算出するステップ(S100)と、発熱量Jを算出するステップ(S102)と、磨耗量ABを算出するステップ(S104)と、磨耗量ABがしきい値AB(0)よりも大きい場合に(S106にてYES)、駆動力制限制御を実行するステップ(S108)と、乗員に通知するステップ(S110)と、磨耗量ABがしきい値AB(0)以下である場合に(S106にてNO)、通常駆動力制御を実行するステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ペダルフィーリングの悪化を抑えつつ、入口弁(常開型比例電磁弁)のハンチングを抑えることを目的とする。
【解決手段】制御部は、常開型比例電磁弁の通電量を第1勾配で減少させる際に、通電量を増加側にオフセットするオフセット制御を実行するオフセット手段を有し、オフセット手段は、電流検出手段で検出された電流値が所定の変動状態となるか否かを判定し(ステップS5)、所定の変動状態となる場合に(Yes)、オフセット制御を実行する(ステップS6)。
(もっと読む)
制動機構の作動状態判定装置
【課題】固着の発生した制動機構の作動状態を速やかに判定し、判定した作動状態を報知する制動機構の作動状態判定装置を提供する。
【解決手段】作動状態判定装置20の電子制御ユニット21は、ブレーキペダルストローク量検出センサ22によって検出されたブレーキペダルストローク量Hbとブレーキ液圧検出センサ23によって検出されたブレーキ液圧Pbとを入力する。そして、ユニット21は、入力したストローク量Hb及びブレーキ液圧Pbが、運転者によるブレーキペダルBの操作に伴って摩擦パッド13が固着の発生した状態によりディスクロータ11の摩擦面に変位する状況に応じて区画された固着領域に含まれるか否かを判定する。この判定により、ストローク量Hb及びブレーキ液圧Pbが固着領域に含まれるときは、ユニット21は、報知装置24を介して運転者に固着の発生した作動状態を報知する。
(もっと読む)
ブレーキ制御装置
【課題】異常が発生した場合において制動力を充分に確保することを可能とするブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置は、液圧制動力と回生制動力とを併用して制動力を発生させる。このブレーキ制御装置は、異常時において補助的に発生させる回生制動力の要求値を演算する制御部と、運転者のブレーキ操作に連動して変動する検出値を制御部に各々が出力する複数のセンサと、を備える。制御部は、複数のセンサのいずれかを選択し、選択されたセンサの検出値を要求値の算出の基礎として用いる。
(もっと読む)
車両用ブレーキ装置
【課題】 基礎液圧に加算される制御液圧を発生する制御液圧発生装置を大型化することなく、例えば、短時間に強い制動力が必要な場合や回生制動力が失われた場合にも制動力の低下を防止することが可能な車両用ブレーキ装置を提供する。
【解決手段】 本発明の車両用ブレーキ装置は、パイロット圧を倍力したサーボ圧を発生してマスタシリンダ内のマスタピストンの後方側に形成されたサーボ室に供給し、マスタシリンダ内のマスタピストンの前方側に形成された液圧室に基礎液圧を発生させる倍力装置と、倍力装置の出力特性を複数の異なる出力特性に変更する出力特性変更装置と、出力特性変更装置に倍力装置の出力特性を複数の異なる出力特性のうちの選択された一つに変更させる特性選択装置と、マスタシリンダの液圧室と車輪のブレーキを構成するホイールシリンダとを連通する出力管路に設けられ、基礎液圧に加算される制御液圧を発生可能な制御液圧発生装置と、を備える。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
車両用ブレーキ装置
【課題】車両用ブレーキ装置における電磁弁の切り替え時の作動音を低減化する。
【解決手段】ブレーキペダルが操作されてペダルストロークが所定値Sp1になったら閉弁駆動電圧をVc1にし、その後ストロークがSp2になるまでストロークの上昇に応じて電圧をVc2まで漸増する。駆動電圧を一気に印加するのではなく、徐々に変化させる状態を含めて印加することから、弁体の着座による作動音の大きさを低減することができる。開弁時も、電圧をVc2からVc1まで徐々に低減し、その後0Vにすることから、一気に閉弁状態に戻ることがないので、弁体の作動音を低減し得る。
(もっと読む)
自動車用の制動装置および制動方法
【課題】自動車用の制動装置および制動方法を提供する。
【解決手段】可変特性曲線に従って、運転者が操作できるブレーキペダル装置12と、ブレーキペダル装置12の操作量に対応し、かつ可変特性曲線に対応する制動効果で自動車を制動する制動ユニット20と、可能特性曲線領域を保存するメモリ装置16と、可能特性曲線領域から可変特性曲線を選択するために設けられた制御ユニット14とを有する、自動車用の制動装置および制動方法を提供する。
(もっと読む)
被害軽減制動装置及び方法
【課題】自車両が相手車両の側面に衝突するときの角度に応じて、衝突回避システムが衝突回避動作時に行う制御内容を異ならせる被害軽減制動装置を提供する。
【解決手段】ステップS103及びS104において自車両が相手車両の側面に衝突すると予測される場合、自車両の進行方向軸と相手車両の側面とのなす角である衝突面角度が算出される(ステップS105)。予め保持されている制限係数マップから、算出された衝突面角度に予め割り当てられている制限係数を読み出して、読み出された制限係数が衝突回避の制動制御時に使用される制限係数に決定される(ステップS106)。衝突回避システムが衝突回避動作時に本来適用している減速Gに、この決定された制限係数が乗算されて新たな減速Gが求められる(ステップS108)。求められた新たな減速Gに従って、ブレーキの制動力等が制御される(ステップS109)。
(もっと読む)
運転支援装置及び運転支援方法
【課題】ドライバーにとって違和感のない運転支援を実行可能な運転支援装置及び運転支援方法を提供する。
【解決手段】自車両V0周囲の状況に応じて支援量決定部14が決定した運転支援量により自車両V0のドライバーの運転支援を行い、運転支援量を決定した後にドライバーによる操舵があったときは、支援量変化量算定部17及び支援実現部18は、運転支援量を決定した後のドライバーによる操舵量に応じた補正量により補正された運転支援量によりドライバーの運転支援を行う。このため、ドライバーにとって違和感のない運転支援が実行される。
(もっと読む)
制動力制御装置
【課題】マスタシリンダ圧センサを必要としない制動力制御装置を提供する。
【解決手段】マスタカット弁41は、磁性体(プランジャ)101と、コイル102と、スプリング103と、を備える。磁性体101は、第1液圧配管38と連結通路43との液圧差に応じた差圧作用力が開弁する方向に作用される。コイル102は、磁性体101が動くことにより、誘導起電力が発生する。誘導起電力は液圧が変化した際、特に運転者がブレーキペダル31を操作した際、コイル102に電磁誘導により電流が流れるようになっている。ブレーキペダル31を操作したことにより発生した電流をブレーキ液圧に換算して制動装置に導入する。これより、ブレーキペダル31によるブレーキ液圧を制動力制御装置に導入することができる。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法
【課題】走行条件や車両条件に応じてブレーキ力を制御し、滑走の発生頻度を低減させることを可能とするブレーキ制御装置およびブレーキ制御方法を得ること。
【解決手段】複数の車両により構成される列車を制動させるブレーキ力を演算するブレーキ力演算部5と、車両の車輪の滑走を検知した際の車両のブレーキノッチ位置および走行速度を含む走行情報、および滑走情報を記録し、走行情報と滑走情報とに基づいて滑走予測を行い、ブレーキ力に対する車両毎、台車毎、あるいは軸毎の分担ブレーキ力の割合を示すブレーキ分担率を演算する滑走抑制制御部12と、ブレーキ力とブレーキ分担率とに基づいて分担ブレーキ力を設定し、基礎ブレーキ装置にブレーキ制御信号を出力するブレーキ力設定部6と、を備える。
(もっと読む)
車両の制御装置
【課題】リチウムイオン二次電池を搭載した車両において、Li析出を抑制するための制御を実行した上で、回生発電による回収エネルギを確保しつつ車両制動力の瞬間的な変動によって車両運転性が低下しないようにする。
【解決手段】HV−ECU302は、リチウムイオン二次電池であるバッテリ18におけるLi析出を抑制するために、バッテリ18の充放電履歴に基づいて充電電力上限値を調整する。さらに、HV−ECU302は、調整された充電電力上限値の範囲内でブレーキペダル操作に対応した要求制動力に対する、制動装置10による液圧制動力と、第2MG60による回生制動力との分担を決定するブレーキ協調制御を実行する。Li析出を抑制するために充電電力上限値を制限する際における充電電力上限値の制限度合は、制動装置10に液圧を供給するためのブレーキ液圧回路80での液圧応答レートの検出値に応じて可変に設定される。
(もっと読む)
車両用ブレーキ装置
【課題】 マスタシリンダおよびマスタカットバルブ間の液路のリークを速やかに判定する。
【解決手段】 スレーブシリンダ42が運転者によるブレーキペダル12の実ストロークに応じたブレーキ液圧を発生すると、そのブレーキ液圧でホイールシリンダ26,27,30,31が作動する。リーク判定手段は、ブレーキペダルストロークセンサSdで検出したブレーキペダル12の実ストロークと、液圧センサSaで検出したマスタシリンダ11が発生する実ブレーキ液圧とを、ブレーキペダル12のストロークと、マスタシリンダ12が発生するブレーキ液圧との関係を示すマップに適用することで、マスタシリンダ11およびマスタカットバルブ32,33間の液路のリークを判定するので、液路のリークを速やかに判定することができる。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリング(10)を備えた車両(1)において、前輪(2L,2R)の左右車輪速差、または後輪(4L,4R)の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に(S3)、所定時間の間(S9)低車輪速側に操舵補助力を付加する。
(もっと読む)
ブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置
【課題】マスタシリンダ内の圧力を検出するための圧力センサを用いることなく、運転手によるブレーキペダルの踏力が高いか否かを判定することができるブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVが第1の減速判定値DV_stを超えた時点での車体減速度の変化勾配DDVを第1変化勾配DDV1とし(ステップS86)、Gセンサ値Gが第2の減速判定値G_stを超えた場合に取得された車体減速度の変化勾配DDVを第2変化勾配DDV2とする(ステップS89)。ブレーキ用ECUは、第2変化勾配DDV2が第1変化勾配DDV1以上である場合(ステップS90:YES)に、運転手によるブレーキペダルの踏力が高いと判定する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、設定されたジャークに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
【解決手段】所望の横移動距離Ye、速度の方向、現時刻の車体合成力の大きさF0、及び車体合成加速度の大きさの時間変化(ジャーク)KJを設定し、自車両の速度のx成分vx0、y成分vy0、Ye、F0/m、及びKJを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置へ到達する際の縦移動距離を最小化する車体合成力を求めるための第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、回避時間teの特定仮定下での値te’との関係を定めた3次元マップを用いて、KJに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両に加わる荷重に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切に開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の荷重WWを取得し(ステップS142)、開始時間判断基準値KT2を荷重WWが重い場合には荷重WWが軽い場合よりも大きな値に設定する(ステップS144)。そして、ブレーキ用ECUは、車体減速度が第1の減速判定値を超えてからの経過時間が開始時間判断基準値KT2以下であると共に、Gセンサ値が第2の減速判定値を超えたときに、補助制御を開始する。
(もっと読む)
21 - 40 / 251
[ Back to top ]