
Fターム[3D246HC01]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | マップによるもの (251)
Fターム[3D246HC01]に分類される特許
141 - 160 / 251
車両制御装置、及び車両制御方法
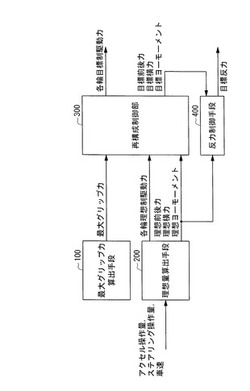
【課題】運転操作に応じた目標制御量を再構成する際に、この再構成に伴う車両挙動の変化を運転者に認識させる。
【解決手段】運転者の運転操作に応じて目標車両挙動を算出し、算出した目標車両挙動に応じて、複数の制御対象に対する夫々の目標制御量を算出し、算出した目標制御量の夫々に対して限界範囲を算出し、目標制御量のうち、全てが限界範囲内であれば、これら目標制御量に応じて制御対象を制御し、少なくとも一つが限界範囲外であれば、全てが夫々の限界範囲内となる新たな目標制御量を算出し、これら新たな目標制御量に応じて前記制御対象を制御するものであって、新たな目標制御量に応じて制御対象を制御する際に、これら新たな目標制御量によって達成される車両挙動と目標車両挙動との差に応じて、運転操作に対する操作反力を制御する。
(もっと読む)
車両用制動制御装置

【課題】 回生協調制御により回生制動トルクと摩擦制動トルクとをすり替えるときの減速度の変動を抑制できる車両用制動制御装置を提供する。
【解決手段】 統合コントローラ110は、回生協調制御時、回生制動トルク変化量ΔRegが大きいほど、インプットロッドストロークXiの変化量に対するプライマリピストン2bの変化量を減少させるアシスト推力補正手段を備える。
(もっと読む)
ブレーキ制御装置
【課題】電源電圧が低下した場合においても制動制御における制動力を確保しつつ、電力使用の効率化を図ることができるブレーキ制御装置を提供する。
【解決手段】ある態様のブレーキ制御装置によれば、電源の出力電圧が閾電圧以上であれば通常の制動制御がなされ、設定された制動力およびその応答性が確保される。一方、電源の出力電圧がその閾電圧より低下すると省電力制動制御に切り替えられ、制動制御における電力消費が低減される。アキュムレータの蓄圧に際してオイルポンプのモータ駆動が開始されたときに、省電力制動制御への切替電圧である閾電圧を基準電圧V10からそれより低い調整電圧V1xに切り替え、省電力制動制御へ移行し難くしている。
(もっと読む)
姿勢安定化制御装置及び車両
【課題】車両の運動状態を動的にモニタし、安定した制御を可能とすることである。
【解決手段】コントローラ103は、車両の運動の目標値を設定する目標値演算部212,213と、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算部216,217と、車両の運転状態を検出する運転状態検出部と、目標値に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する目標安定余裕度演算部218と、車両の運転状態に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する実安定余裕度演算部219と、生成された制御量を、補正量を用いて補正する調停処理部222と、補正された制御量を用いて、アクチュエータを制御する駆動部と、を備える。
(もっと読む)
車両制御装置及び車両制御方法
【課題】緊急操舵時における車両の安定性を確保することができる車両制御装置及び車両制御方法を提供する。
【解決手段】目標ヨーレートφ´tと目標横速度Vytとに基づいて算出される目標前輪舵角θt及び目標後輪舵角δtに基づいて、前輪操舵機構12及び後輪操舵機構15を駆動する。また、運転者による緊急操舵を検出したとき、その緊急度(緊急回避操作度合Ks)が高いほど車両挙動を安定化するように目標値(目標横加速度、目標ヨーレート)を大きく減少補正する。そして、補正した目標値を実現するような目標ヨーモーメントYawmを発生するようにブレーキ制御を作動する。
(もっと読む)
車両運動制御装置
【課題】走行エネルギの損失が少ないスムーズで高燃費な走りと最大の車両運動性能を発揮することを走行状態に応じて的確にバランスさせる。
【解決手段】前後制駆動力制御装置30は、目標ステア特性を実現するエネルギ損失最小の前後軸の制駆動力を第1の前後制駆動力Fxfte、Fxrteとして算出し、目標ステア特性を実現しなおかつ前後軸の最大タイヤ横力の和を最大にする前後軸の制駆動力を第2の前後制駆動力Fxftp、Fxrtpとして算出する。そして、横加速度(d2y/dt2)を基に算出した前後軸のタイヤ横力Fyf、Fyrと路面情報(路面μ)に基づいてグリップマージンMgを設定し、グリップマージンMgに応じて第1の前後制駆動力Fxfte、Fxrteと第2の前後制駆動力Fxftp、Fxrtpとを基に前後軸の目標制駆動力Fxft、Fxrtを算出して制駆動力制御装置20に出力する
(もっと読む)
ブレーキ装置の制御装置
【課題】 ブレーキ装置の制御装置において、助勢制御の終了を所望の適切なタイミングで行うことである。
【解決手段】制御装置は、助勢制御手段による油圧ポンプの駆動中において、所定条件が満足された場合には、その満足された時点において判定用助勢限界圧演算手段(ステップ104)で演算された判定用助勢限界圧を第1判定値として導出し記憶する第1判定値導出記憶手段(ステップ124)と、ブレーキ操作部材の戻しが開始されたか否かを判定する戻し開始判定手段(ステップ110、114)と、を有し、助勢制御手段は、油圧ポンプの駆動中において、戻し開始判定手段がブレーキ操作部材の戻しが開始されたと判定した場合には、第1判定値導出記憶手段で記憶されている第1判定値を判定用助勢限界圧として使用して助勢制御を実行する(ステップ128)。
(もっと読む)
運転支援装置
【課題】 自車が対象車両と衝突するのを回避するための運転支援を行う際に、衝突の可能性が無い車両を対象とする無駄な運転支援が行われるのを防止する。
【解決手段】 自車が対象車両と衝突する可能性を判定し、衝突する可能性が有ると判定された場合に、自車が対象車両と衝突するのを回避すべく、運転支援手段M6により自車の運転者に対する運転支援を行う。交差点判定手段M10が自車前方の道路に自車が一時停止すべき交差点が存在するか否かを判定し、前記交差点が存在する場合には、運転支援手段M6は前記交差点以遠に存在する対象車両についての運転支援を抑制するので、自車が前記交差点で一時停止することで無意味になる運転支援が無駄に行われるのを防止することができる。
(もっと読む)
衝突被害軽減制動制御装置
【課題】制動を実行したときの情報を保存することが可能な衝突被害軽減制動制御装置を提案する。
【解決手段】衝突被害軽減制動制御装置は、前方障害物との相対距離及び相対速度が、衝突判断基準値に到達する可能性があることを判断し(S1〜S2)、可能性があれば、相対距離及び相対速度を記憶し始める(S3)。次いで衝突判断基準値を超過するか否か判断し(S4〜S5)、衝突判断基準値を超過すると判断したときには制動を実行する(S7)。制動を実行したときには、それまでに記憶した情報を保存する(S8)。
(もっと読む)
ブレーキ力倍力装置
本発明は、筋力で操作するためのピストンロッド(3)と、電気機械式のアクチュエータ(2)とを備える電気機械式のブレーキ力倍力装置(1)に関する。本発明は、ペダルロッド(3)の筋力が弾性的な伝達部材(8)、例えばばね部材(19)を介して、かつアクチュエータ力が、弾性的な伝達部材(8)とは別に、例えば複数のばね部材(20)及び並列に配置されたダンパ(21)を備える固有の弾性的な伝達部材(13)を介して伝達されることを提案する。その際、制御可能なブレーキ力倍力装置は、倍力装置ボディ及び入力部材の相対変位を表す量に基づいて運転される。本発明に係るブレーキ力倍力装置(1)は、特に操作ストローク、操作速度及び/又は操作加速度に基づいていてよい、広範な範囲で可変の倍力装置特性線の設定を可能にする。異なるモード、例えばスポーツモードへの切換も可能である。 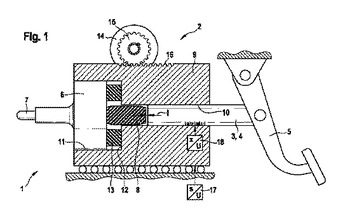 (もっと読む)
(もっと読む)
車両運転支援装置
【課題】走行中の運転者に対しカーブミラー内に映った鏡像を見やすくしたり、カーブミラー内における接近物体を自動的に認識して運転者に対する警報や車両制御を可能にしたりして、交差点やカーブでの出合い頭の事故を未然に且つ確実に防止できるようにする。
【解決手段】車両前方を撮像する撮像手段10aと、その前方画像からカーブミラーを認識して特定する特定手段21aと、そのカーブミラーにおけるミラー内画像を取得する取得手段21b(10b,11)と、そのミラー内画像を正面から見た正視画像に変換する画像変換手段21cと、その正視画像に対しミラー周辺部の画像歪み補正を行なう画像歪み補正手段21dと、その補正後正視画像を車両運転者に対し表示する表示手段40(23a)とをそなえる。
(もっと読む)
ブレーキ装置の制御装置
【課題】 ブレーキ装置の制御装置において、負圧センサ、マスタシリンダ圧センサやバキュームブースタにバラツキがあっても、その影響をできるだけ抑制して、ブレーキ装置に所望のブレーキ性能を発揮させることである。
【解決手段】制御装置26は、ブレーキ操作部材の実際の一操作行程においてマスタシリンダ圧取得手段26bで取得されたマスタシリンダ圧から得られる情報に基づく勾配変化と操作行程にて負圧取得手段26aで取得された負圧とから、その負圧における該バキュームブースタの助勢限界に対応したマスタシリンダの圧力である実際の助勢限界圧を演算する実際の助勢限界圧演算手段26fと、実際の助勢限界圧演算手段26fで演算された実際の助勢限界圧を記憶する第2記憶手段26gと、第1記憶手段26cに記憶されている負圧−助勢限界圧マップを第2記憶手段26gに記憶されている実際の助勢限界圧を用いて補正するマップ補正手段26hと、を有することである。
(もっと読む)
ブレーキ制御装置
【課題】制御系に対する外乱や外界の状態変化などに拘らずに、目標ブレーキトルクを適切に設定すると共に制動力が不必要に低下してしまうことを防止する。
【解決手段】ブレーキ制御装置10は、車体減速度演算部52による車体の推定減速度GRDVの前回の演算時に車輪速センサ45により検出された車輪速と今回の演算時に車輪速センサ45により検出された車輪速とにより車輪減速度GReを算出する車輪減速度演算部53aと、推定車体減速度GRvを算出する推定車体減速度演算部53bとを備え、車体減速度演算部52は、車輪減速度GReと推定車体減速度GRvとの比に応じた補正係数KDによる補正をおこなって車体の推定減速度GRDVを演算しており、補正係数KDは、推定車体減速度GRvよりも車輪減速度GReのほうが大きい場合に、補正前に比べて補正後に推定減速度GRDVが大きくなるように補正する。
(もっと読む)
電気自動車の回生制御装置
【課題】電気自動車の回生制御装置に関し、ブレーキトルクの制御における電気回生トルク成分と機械的な摩擦制動トルク成分とのバランスを取り、制動性能を向上させる。
【解決手段】車輪に回生駆動される電動機及び該車輪を制動する摩擦制動装置を有する電気自動車において、該電動機の回生トルク量を制御する回生制御装置であって、該摩擦制動装置のブレーキ温度Teを算出するブレーキ温度算出手段32と、所定走行距離当たりの制動回数を制動頻度fとして算出する制動頻度算出手段33と、ブレーキ温度算出手段32で算出されたブレーキ温度Te及び制動頻度算出手段33で算出された制動頻度fに基づいて、該電動機の回生トルク量Nを制御する回生量制御手段31とを備える。
(もっと読む)
ブレーキ制御装置
【課題】液圧制御のための電磁弁等のアクチュエータおよびその制御装置を含むブレーキ制御装置の省電力化と小型化を実現可能にする。
【解決手段】ある態様のブレーキ制御装置においては、開閉弁を開閉させるためのリニアソレノイドへの通電制御において、その制御電流が起動電流から保持電流へ段階的に低くなるように制御される。また、起動電流の供給時には温度補正の完了の有無にかかわらず初期通電期間Δt0を確保するようにした。
(もっと読む)
車両用減速制御装置及びその方法
【課題】路面μの推定を必要とせず、路面状態に適合して減速制御する。
【解決手段】車両用減速制御装置は、検出した車輪力(横力Fy)及びスリップ度(スリップ角βt)を基に、車輪のグリップ特性を示すグリップ特性パラメータを得るμ勾配算出部25と、グリップ特性パラメータを基に、補正係数Kを得る補正係数K算出部26と、車両の旋回状態を基に目標車速V*を算出するとともに、該目標車速V*を補正係数Kにより補正する目標車速算出部22と、を備える。
(もっと読む)
車速制御装置
【課題】運転者の感覚に合った走行が可能な適切な目標車速に変更できる車速制御装置を提供することを課題とする。
【解決手段】目標車速に基づいて車両の車速を制御する車速制御装置であって、運転者の特性を推定する運転者特性推定手段と、走行中の道路形状を取得する道路形状取得手段と、運転者特性推定手段で推定した運転者の特性と道路形状取得手段で取得した道路形状に基づいて目標車速を変更する目標車速変更手段とを備えることを特徴とする。
(もっと読む)
車両の制御装置及びその制御方法
【課題】エンジンを自動停止自動始動後にヒルホールド制御を行うアイドルストップ制御において、ホイールブレーキ作動圧の保持解除を最適に行うことで操作応答性に優れた車両の制御装置及び車両の制御方法を提供することである。
【解決手段】エンジン自動停止後、S13でエンジン始動条件が成立したか否か判定され、Yesの場合、エンジン1に始動指令を送りエンジンを始動させると共に、タービン回転数が600rpmを越えて300rpmを下回るまでヒルホールド制御部がブレーキ液圧を保持する。タービン回転数が300rpmを下回ると、ブレーキ液圧Pが減圧される(S17)。
(もっと読む)
車両運動制御装置
【課題】
本発明の目的は、ブレーキ液圧に対するブレーキ液圧推定値の遅れを容易に補正可能な車両運動制御装置を提供することである。
【解決手段】
車両挙動に基づいてブレーキ液圧制御指令値を演算するコントローラと、前記ブレーキ液圧制御指令値に基づいてブレーキ液圧制御を行う油圧ユニットを備えた車両運動制御装置において、前記コントローラは、前記ブレーキ液圧制御を行った時の前記車両挙動に基づいて、次に前記ブレーキ液圧制御を行う時の前記ブレーキ液圧制御指令値を補正する。
(もっと読む)
車両制動装置
【課題】より快適な運転フィーリングを実現することができる車両制動装置を提供すること。
【解決手段】本発明による車両制動装置1は、ペダル2の操作量に応じて基礎油圧から操作油圧を発生するマスターシリンダ5と、操作油圧を増圧して制御油圧を発生する増圧手段9、10とを備えてペダル2の操作量に基づいて油圧制動を行う油圧制動手段8と、操作油圧の検出値Pを検出する操作油圧検出手段18と、操作量を検出する操作量検出手段3と、増圧手段を制御する制御手段7aと、操作量と操作油圧の予め定められる関係から操作油圧の推定値PfromSを推定する推定手段7bと、増圧手段9、10による増圧が行われていて検出値Pが推定値PfromS以下である場合に、制御手段7aが、推定値PfromSを用いて増圧手段9、10による増圧の量を演算して増圧の量を差圧要求として増圧手段に出力することを特徴とする。
(もっと読む)
141 - 160 / 251
[ Back to top ]