
Fターム[3D246HC01]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | マップによるもの (251)
Fターム[3D246HC01]に分類される特許
201 - 220 / 251
車両用ブレーキ装置
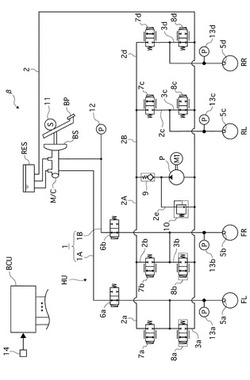
【課題】 装置全体の小型化・簡素化・低コスト化を可能としつつ、回生制動時に回収できるエネルギ量を増大できる車両用ブレーキ装置を提供すること。
【解決手段】 車両の駆動輪RL,RRを駆動するモータMを備え、回生制動時にはモータMをジェネレータとして回生ブレーキを実施する車両用ブレーキ装置において、マスタシリンダMCと、マスタシリンダMCと連動し運転者の踏力により作動するブレーキペダルBPと、マスタシリンダMCを作動させる倍力装置BSと、車両の各車輪に設けられたホイルシリンダ5a〜5dと、倍力装置BSにより昇圧されたブレーキ液を少なくとも従動輪FL,FRのホイルシリンダ5a、5bに供給する第1ブレーキ回路1と、を備え、回生制動実施時に上記(従動輪FL,FRに供給される)ブレーキ液の液圧を低減させる一方、駆動輪RL,RRの回生制動力を増加させることとした。
(もっと読む)
ブレーキ制御装置

【課題】ペダルフィーリングを向上する。
【解決手段】ブレーキ制御装置は、車両が押し出され状態となる可能性があるか否か予測し、車両が押し出され状態となる可能性があると予測された場合、運転者によりブレーキペダルが操作されたのと略同時にポンプの駆動を開始する。そして、実際に車両が押し出され状態となったか否かを判定し、車両が押し出され状態にあると判定された場合に、リニア制御弁を調整することにより、ポンプで加圧された作動流体をホイールシリンダに供給してホイールシリンダ圧を増圧させる。
(もっと読む)
車両の旋回挙動制御装置
【課題】車両の加減速に応じて制御方向がUS抑制方向であってもOS抑制方向であっても制御量に対する要求ヨーモーメントの不感帯を適正なものとし、車両の走行性能を向上させつつ、ドライブフィールのよい車両の旋回挙動制御装置を提供する。
【解決手段】ヨー運動制御手段(43)により、要求ヨーモーメント設定手段によって設定された要求ヨーモーメントに応じて制動力調整手段を制御して車両のヨー運動を制御することになるが、ヨー運動制御手段は、要求ヨーモーメントの0値近傍に所定幅(US抑制側:DZus、OS抑制側:DZos)の不感帯を有しており、前後加減速GXが加速側に大きくなるほど該不感帯の所定幅を広げるようにする。
(もっと読む)
電動車両
【課題】左右の後輪を電動モータにより回転駆動する方式の電動車両において、安全にコーナリング特性を向上させる。
【解決手段】ブレーキトルク指令値演算部53において、PIDコントロール部51からフィードバックされた各スリップ率の差分と、ブレーキペダル開度検出部22により検出されたブレーキペダルの開度を示す信号とに基づいて、第1電動モータ7への第1ブレーキトルク指令値BT1及び第2電動モータ11への第2ブレーキトルク指令値BT2を演算し、モータ制御部47では、ブレーキトルク指令値演算部53によって演算された第1ブレーキトルク指令値BT1及び第2ブレーキトルク指令値BT2に基づいて第1電動モータ7及び第2電動モータ11のブレーキトルクを制御する。
(もっと読む)
クラッチが自動車内で伝達するトルクのマッピングを設定する装置及び方法、並びにこのような装置を備える自動車の坂道発進アシストシステム
本発明は、車両運転時に、自動車のクラッチが伝達するトルクのマッピング(2)を、クラッチ制御部材(3)の位置に基づいて求める装置に関する。前記装置は、前記マッピング(2)を、前記クラッチ制御部材(3)の位置閾値に基づいて更新する手段(5)を含む。前記更新手段(5)は、前記閾値の値を、前記マッピング(2)に保存された前記制御部材(3)の前記位置の最小値及び最大値に基づいて、かつ前記閾値の現在値に基づいて変更する計算手段(7)を含む。  (もっと読む)
(もっと読む)
車両の挙動制御装置
【課題】目標旋回状態指標値と実旋回状態指標値との偏差に応じて車両の減速制御を実行する車両の挙動制御装置であって、急旋回時の実旋回状態指標値の応答遅れに起因する車両の減速度の低下を抑制し、車両の安定性を向上するよう構成された装置を提供すること。
【解決手段】本発明の車両の挙動制御装置は、車両の操舵角に基づき決定される目標旋回状態指標値と実旋回状態指標値との偏差が低減するよう車両の減速度を制御する減速制御手段を含み、減速制御手段が車両のロール状態指標値が所定の判定基準値を超えるときには減速度の低減勾配を低減することを特徴とする。
(もっと読む)
追従制御装置
【課題】 周辺車両の走行状態を含む周辺環境とドライバの好みとを考慮した最適な車間距離を確保して走行することを可能にする追従制御装置を提供する。
【解決手段】 追従制御装置1は、ECU2と、ドライバが車間モードを選択入力するための車間切替スイッチ4とを備えている。ECU2は、車間切替スイッチ4によりオートモードが選択されると、メモリ部に記憶されたドライバ好み車間距離マップから、ドライバの好みに応じた車間距離を設定すると共に、レーダの検出信号に基づいて、周辺車両の走行状態に応じた車間距離を求める。そして、ECU2は、ドライバの好みに応じた車間距離と周辺車両の走行状態に応じた車間距離とを用いて、自車両と先行車両との目標車間距離を求め、その目標車間距離に応じて速度を制御する。
(もっと読む)
車両用制駆動力制御装置
【課題】機械制動と回生制動とにより車両を制動する場合の再加速性を向上できる車両用制駆動力制御装置を提供すること。
【解決手段】機械制動と回生制動とにより車両を制動する車両用制駆動力制御装置であって、回生制動により発電される電力が充電される蓄電部と、蓄電部から供給される電力で車両を駆動する駆動手段と、走行環境を検出する走行環境検出手段(S1075)と、走行環境検出手段により検出された走行環境に応じて車両を制動するにあたり、走行環境に基づいて制動後の加速時における要求駆動力を推定する推定手段(S1080)とを備え、推定された要求駆動力に基づいて、車両を制動する際の全体の制動力における回生制動による制動力の比率が可変に設定される。
(もっと読む)
車両の制駆動制御装置及び制駆動制御方法
【課題】車両状態が変化した場合にも、要求される車両挙動を実現するためのヨーモーメントを発生させることを可能とする。
【解決手段】左右の車輪3a、3bの制駆動力を独立に制御可能な制駆動手段4と、車両目標制駆動力及び車両目標ヨーモーメントを設定する車両目標値設定手段7と、目標制駆動力及び目標ヨーモーメントに基づいて左右の車輪3a、3bに制駆動力を配分する制駆動力配分手段7と、走行状態に基づいて実現可能な制駆動力及びヨーモーメントを算出する実現可能値設定手段7と、運転者による操舵変化量を検出する操舵変化量検出手段9と、運転者に旋回を要求する旋回要求手段14と、実現可能な制駆動力又はヨーモーメントが車両目標制駆動力又は車両目標ヨーモーメントより小さく、かつ旋回要求手段14から旋回を要求された場合に、操舵変化量に応じて車両目標制駆動力及び車両目標ヨーモーメントを補正する目標値補正手段7と、を備える。
(もっと読む)
ブレーキ装置
【課題】 少ないブレーキ操作量および操作力で所望の制動力を得つつ、運転者のブレーキ操作フィーリングを向上できるブレーキ装置を提供すること。
【解決手段】 運転者のブレーキ操作量(レバーストロークXL)に応じてマスタシリンダ3とブースタ(ブースタシリンダ4)とからホイルシリンダ5にブレーキ液を供給するブレーキ装置であって、ブレーキ操作量に基づき設定される目標ブレーキ液量(標準液量Qs)をブースタピストン42の変位(ストロークXb)に基づく実際のホイルシリンダ圧相当値(ブレーキ液圧Pb)の変化から補正し、上記補正後の目標ブレーキ液量(目標液量Q*)に基づきブースタピストン42の目標位置(目標ストロークXb*)を設定し、設定された目標位置(目標ストロークXb*)に基づきアクチュエータを制御する制御手段(ECU)を有することとした。
(もっと読む)
リニアソレノイドバルブ制御装置
【課題】油撃音を低減すると共に、低消費電力化が可能なリニアソレノイドバルブ制御装置を提供する。
【解決手段】流体が流通する流路と、リニアソレノイド1aと、該流路を開閉するバルブ1と、励磁電流をリニアソレノイド1aに印加することにより所定のバルブ制御量に従ってバルブ1の開度を制御するバルブ制御部2とを備えたリニアソレノイドバルブ制御装置100は、流路とバルブ1との間に流体中の異物が噛み込んだことを検出する噛み込み検出部28と、噛み込み検出部28にて異物の噛み込みが検出された場合に、噛み込んだ異物のサイズを推定するサイズ推定部29とを備え、バルブ制御部2は、サイズ推定部29により推定された異物のサイズに対応した開度にバルブ1を制御する励磁電流をリニアソレノイド1aに印加する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】常開型比例電磁弁を採用した車両用ブレーキ液圧制御装置において、路面状態の低μ路から高μ路への変化を判定する。
【解決手段】制御部20は、車輪ブレーキ液圧(キャリパ圧)を推定する車輪ブレーキ液圧推定手段24と、路面摩擦係数を推定する路面摩擦係数推定手段21と、路面摩擦係数の変化を判定する変化判定手段26とを備え、変化判定手段26は、車輪ブレーキ液圧の増圧中において、車輪ブレーキ液圧(推定キャリパ圧PCAL)が、前回増圧状態から減圧状態へ移行した時点の車輪ブレーキ液圧(ロック液圧PL2)よりも所定値Th以上大きくなった場合に路面摩擦係数が低い値から高い値へ変化したと判定する。
(もっと読む)
車両の制動制御装置
【課題】ポンプの駆動態様の変更に起因した駆動音の大きさの変動によって車両の搭乗者に不快感を与えることを抑制できると共に、ポンプの駆動態様をホイールシリンダからリザーバ内に流入するブレーキ液の液量に応じた駆動様態に設定できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中において車両が走行している路面が高μ路から低μ路に変わっていない場合、偏差補正量Qreq_Aveと基準吐出量Qreq_baseとを加算することにより設定された目標吐出量Qreqのブレーキ液がポンプから吐出されるように偏差ポンプ駆動制御を実行する。一方、ECUは、車両が走行している路面が高μ路から低μ路に変わった場合、緊急補正量Qreq_Skidと基準吐出量Qreq_baseとを加算することにより設定された目標吐出量Qreqのブレーキ液がポンプから吐出されるように緊急ポンプ駆動制御を実行する。
(もっと読む)
車両の旋回挙動制御装置
【課題】車両の旋回性能を向上させつつドライブフィールのよい車両の旋回挙動制御装置を提供する。
【解決手段】第1及び第2のヨー運動調整手段31,33を制御して、車両のヨー運動を抑制する場合、ヨー運動調整手段31、33に制御量を配分し、旋回内輪の駆動力が増加するように第1のヨー運動調整手段31を制御しながら旋回外輪の制動力が増加するように第2のヨー運動調整手段を制御し、車両のヨー運動を促進する場合、両ヨー運動調整手段に制御量を配分して、旋回外輪の駆動力が増加するように第1のヨー運動調整手段31を制御しながら旋回内輪の制動力が増加するように第2のヨー運動調整手段33を制御し、車両が加速の場合に、第1のヨー運動調整手段31に配分する制御量の割合を、減速の場合の割合よりも大きくし、減速の場合に、第2のヨー運動調整手段33に配分する制御量の割合を、加速の場合の割合よりも大きくする。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車輪ブレーキ側の液圧路の迅速な加圧を可能にし、実液圧を目標液圧に近づける。
【解決手段】ポンプ4、ポンプ4を駆動するモータ9と、調圧弁Rに流す電流を目標液圧に応じて制御する制御部20を備える車両用ブレーキ液圧制御装置である。制御部20は、車輪ブレーキFR,FL,RR,RLの目標液圧を液量に換算し、この液量から必要流量を計算する手段と、計算した必要流量から、ポンプ4の能力に基づいてモータ9の必要回転数を計算する手段と、必要回転数が、検出または推定して得られたモータ9の実回転数を超えた場合には、調圧弁Rに流す電流を所定量高くする手段とを備える。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車輪ブレーキ側の液圧路の迅速な加圧を可能にするとともに、モータの作動音を低減する。
【解決手段】
マスタシリンダMとホイールシリンダHの間に調圧弁Rを設け、この調圧弁RよりもホイールシリンダH側の液圧路にブレーキ液を吐出するポンプ4を備える車両用ブレーキ液圧制御装置100において、ポンプ4を駆動するモータ9の初期駆動時に、目標液圧にかかわらず、第1の所定時間の間は目標液圧から定まるデューティ比よりも高いデューティ比で調圧弁Rを制御する。
(もっと読む)
坂道運転支援方法
本発明は、クラッチによって駆動輪に接続されたパワーユニットと自動駐停車ブレーキとを含む、車両用の坂道運転支援方法において、車両の所定の物理的パラメータが満たすべき条件から、使用者および車両が、坂道発進の準備が整ったと推定される状態に対応する、勾配特性(θpente)を記憶する命令を生成するステップを含むことを特徴とする坂道運転支援方法に関する。  (もっと読む)
(もっと読む)
車線逸脱防止装置
【課題】運転者のステアリング操作が意図的であるか否かを正確に判断する。
【解決手段】左右輪の制動力差による進路修正に伴って、閾値θsを変更している。つまり、目標ヨーモーメントMsを発生させる際に(厳密には運転者の体重移動が発生する前に)、予想される運転者の体重移動に応じて、閾値θsを変更しておく。また、発生させるヨーモーメントMsが大きいほど、それだけ運転者の体が横方向に振られることになるので、Msが大きいほど、閾値θsを大きくする。
(もっと読む)
自動車の坂道運転支援装置におけるデータ処理方法
データ獲得ステップ中に記録される、クラッチによって伝達されるトルクの値とクラッチ制御機構の位置の値との間の対応関係(CC)を定義するデータの処理方法であって、クラッチによって伝達されるトルクの値とクラッチ制御機構の位置の値との間の修正された対応関係(CCtkf)を定義するために、記録されたデータを修正するステップを含み、この修正された対応関係は、クラッチとブレーキシステム(5)とを含むパワートレインによって駆動輪に連結されるパワーユニットを備えた自動車(7)の坂道運転支援装置(8)内で利用されるためのものであり、前記支援装置が前記ブレーキシステムの締め付け解除を自動的に制御することを特徴とする方法。  (もっと読む)
(もっと読む)
自動車の制御部材の位置センサから発信された信号の処理方法
本発明は、自動車(7)の制御部材の位置センサ(3)が発する信号(θclutch)を処理する方法に関するものであり、本方法では、制御部材の位置に関する処理信号を生成する。本発明は、本方法が、第1フィルタ(27)を使用してセンサが発する信号をフィルタリングすることにより、第1フィルタリング済み信号(θclutch_f)を取得するフィルタリング段階と、第1フィルタリング済み信号の瞬時値が第1閾値パラメータ(θclutch_antLB)の値を上回る場合は第1フィルタリング済み信号に第2信号を加算したものを処理信号として供給し、下回る場合はセンサが発する信号を処理信号として供給する置き換え段階とを含むことを特徴とする。  (もっと読む)
(もっと読む)
201 - 220 / 251
[ Back to top ]